Несмотря на то, что основная направленность данного курса лекций такова, что не возникает необходимости в подробном обсуждении вопросов, связанных с неопределенностью, тем не менее следует иметь в виду, что при анализе большинства реальных системных задач практически ничего не известно достоверно. Независимо от выбранного математического описания, неопределенности будут присутствовать в динамике, целях, ограничениях и т.п. При удачном стечение обстоятельств для неопределенных переменных будут известны с определенной достоверностью распределения вероятностей. Однако довольно часто даже распределение вероятностей заранее неизвестны, поэтому возникает адаптивная ситуация. В любом случае нельзя считать анализ законченным без тщательного исследования неопределенностей, присущих выбранной модели.
В дальнейшем будем придерживаться довольно смелого предположения, что всеми неопределенными эффектами можно пренебречь, т.е. будем считать, что передаточные функции, динамика состояний и т.д. известны достоверно. Такое допущение, естественно, должно быть оправдано полученными результатами, что мы и попытаемся продемонстрировать в каждом отдельном случае.
Лекция 7: Основные положения теории систем (1 часть)
В настоящее время существенно увеличилось число проблем, решение которых не может быть получено редукционистскими методами, что, в свою очередь, возродило интерес к изучению и развитию холистских (или глобальных) подходов. В этой связи наша цель состоит в том, чтобы каталогизировать некоторые наиболее перспективные направления, включая вопросы связности, сложности и устойчивости. Для иллюстрации фундаментального различия между локальным и глобальным описанием системы рассмотрим простой пример — математический маятник
Рис.7.1 — Математический маятник
Если отклонение маятника от вертикали обозначим через x(t), то в локальной окрестности любого такого положения можно записать динамические уравнения движения
d2x/dt2 + sin(x) = 0, x(0) = x0, x(0) = 0,
в безразмерных единицах. Это уравнение описывает локальное поведение маятника в (бесконечно малой) окрестности положения 2 0x(t). Редукционист попытался бы «склеить» подобные локальные описания для последовательных точек в надежде достичь понимания глобального поведения. Хотя иногда такой подход оказывается успешным, непредвиденные проблемы, возникающие при его использовании, существенно снижают его эффективность.
Холист, приступая к решению этой же задачи, прежде всего заметил бы, что должны соблюдаться определенные глобальные свойства системы, и поэтому любое локальное поведение должно удовлетворять ограничениям, налагаемым глобальными свойствами. Если к тому же эти ограничения достаточно жестки, то можно ожидать, что любые локальные движения ими определяются однозначно.
В случае движения маятника эти глобальные ограничения определяются принципом Гамильтона-Якоби, согласно которому, глобальное движение системы соответствует минимуму полной энергии системы. Вводя гамильтониан
Н = Кинетическая энергия + Потенциальная энергия
видим, что движение системы должно быть таким, что гамильтониан
H(x, dx/dt) = (0,5) ⋅ (dx/dt)2 + 1 - cos(x)
достигает минимума. Это уравнение, очевидно, может быть сведено к уравнению движения, приведенному выше, т.е. локальные уравнения движения могут быть получены как следствие глобального принципа, а не выведены на основе рассуждений локального характера и использования второго закона Ньютона. С концептуальной точки зрения такое различие является фундаментальным.
Для систем, рассматриваемых в социально-экономических приложениях, не существует подобных общих законов (по крайней мере сейчас), и мы вынуждены ограничиться рассмотрением ряда глобальных свойств и методов работы с ними, рассчитывая на то, что освещение различных аспектов задачи поможет понять ее структуру в целом.
В качестве примера использования глобального подхода для решения системных задач рассмотрим ситуацию с заторами на транспортной магистрали. Учитывая наличие множества факторов, влияющих на дорожную ситуацию, можно попытаться склеить локальные ситуации, полученные методом Монте-Карло или методами теории очередей и т.д. Такой подход позволяет выявить множество деталей, однако в большинстве случаев остается неясным, как можно использовать полученные результаты для анализа других дорожных ситуаций. Холист в этом случае прибегнул бы к помощи статистической физики и попытался бы описать подобную ситуацию одним уравнением, пренебрегая дистанцией между машинами, причинами заторов и т.д. Главным для него было бы значение параметра q — плотности потока машин (число машин в час на километр пути). Время TA (минуты), необходимые для преодоления 1 км дороги, можно представить как сумму двух слагаемых
TA = TA0 + k ⋅ nA,
где TA0 — время, необходимое для преодоления участка дороги длиной А = 0 без учета помех со стороны других машин (q = 0) (TA0 = 0,5 мин/км соответствует скорости свободного движения 120 км/час); k ⋅ nA — дополнительное время, необходимое для преодоления участка А = 1 км, пропорциональное числу машин nA, находящихся на участке А в течение времени TA (т.е. задержка в условиях заторов является линейной функцией числа торможений и ускорений, или числа nA машин, участвующих в движении). Число nA — является произведением плотности потока машин (транспорта) q и длительности периода времени TA:
nA = q ⋅ TA / 60.
Учитывая предыдущие соотношения, получаем
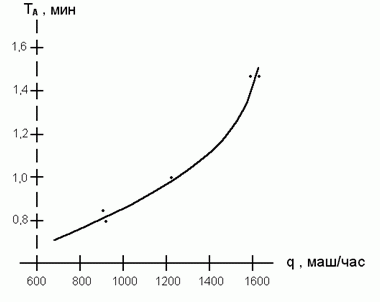
TA = TA0 / (1 - k ⋅ q / 60)
Функция TA = f(q) является выпуклой: каждая дополнительная машина, приводящая к росту q, не только задерживается на участке А, но и является причиной задержки других машин. При значениях TA = 0,5 и k = 0,0266 имеется хорошее согласие между кривой и экспериментальными данными (рис.2.4)
Полученное уравнение дает значение для q, лежащие гораздо ниже теоретического значения плотности q = 2,255 маш/час, соответствующей «параличу дороги». Таким образом, глобальный (а не локальный) подход позволяет построить содержательную модель временных задержек в транспортной магистрали с заторами.