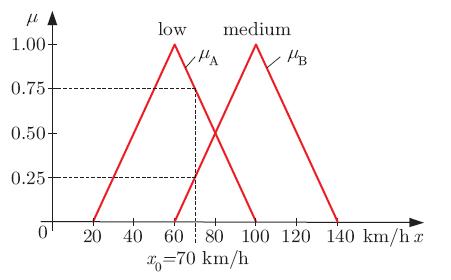
Первый блок внутри статического преобразователя (контроллера) осуществляет фаззификацию, т.е. преобразует каждое значение входного сигнала (физическую переменную) в степень принадлежности посредством просмотра одной или нескольких функций принадлежности, другими словами, преобразует количественную информацию в качественную. Блок фаззификации таким образом устанавливает соответствие входного сигнала предпосылкам базовых правил с целью определить насколько хорошо предпосылки каждого правила соответствуют данному конкретному значению входного сигнала. В результате фаззификации определяются степени принадлежности для каждого лингвистического терма применительно к этому конкретному значению входа.
Правила, описывающие лингвистическую модель нечеткого статического преобразователя, могут использовать несколько лингвистических переменных, как в предпосылках, так и в заключениях правил. Поэтому контроллеры могут быть применимы как для задач управления в системах с одним входом и одним выходом (одномерными системами), так и для задач управления в системах с несколькими входами и несколькими выходами(многомерными системами). Типичная задача управления объектом с одним входом и одним выходом – изменять управляющее воздействие (управляющий сигнал), используя сигнал ошибки. При этом принцип управления называется управлением по ошибке (по отклонению). Для успешной работы контроллера могут потребоваться в качестве его (контроллера) входных сигналов не только сигнал ошибки, но и скорость изменения ошибки (производная от ошибки), и интеграл от ошибки. Однако их можно вычислить, используя одноконтурную систему управления, т.к. все три упомянутых переменных формируются из полученной в результате измерения ошибки. Ради простоты, в этом разделе предположим, что целью управления является регулирование (стабилизация) некоторой управляемой величины в соответствии с заданной рабочей точкой, другими словами, с заданным желаемым значением. Рассмотрение проблем построения правил, таким образом, ограничим лишь одноконтурными системами.
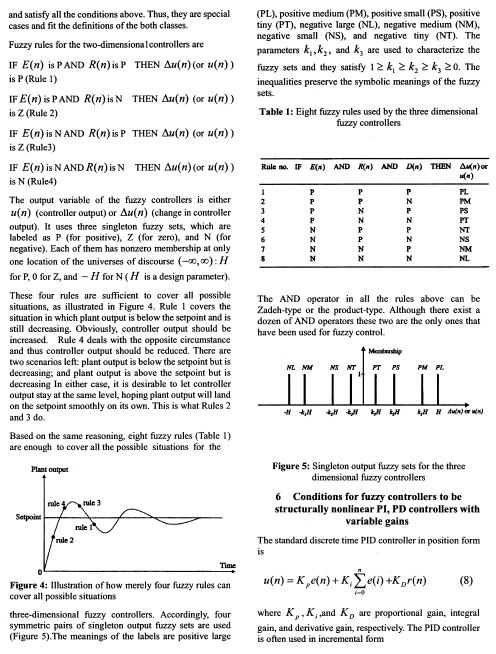
Пример. На рис. ниже показано, каким образом можно сформулировать правила, исходя из желаемой реакции системы на 1(t). Например, когда ошибка (e=1-y>0) и ее скорость изменения (ce=->0) положительны, то это означает, что управляемая величина уменьшается и удаляется от требуемого установившегося значения. Поэтому надо приложить к ОУ положительное управляющее воздействие (u>0). Путем подобных рассуждений приходим к четырем правилам:
1. Если e>0 и ce>0, то u>0.
2. Если e>0 и ce<0, то u=0.
3. Если e<0 и ce>0, то u=0.
4. Если e<0 и ce<0, то u<0.
Рис. 2.6,a
Этих четырех правил достаточно, чтобы описать все возможные ситуации, которые представлены на рис. 2.6,a . Правило 1 описывает ситуацию, когда управляемая величина y меньше желаемого значения v, определяемого в данном случае ее установившимся значением, и продолжает уменьшаться (e>0 и ce>0). Очевидно, нужно, чтобы управляющее воздействие u (выходная величина регулятора) было положительным (u>0). Правило 4 имеет дело с противоположными обстоятельствами и, следовательно, выход регулятора должен быть отрицательным (u<0). Остаются еще два возможных ситуации (варианта действий): выход ОУ (управляемая величина) меньше установившегося значения, но ее значения увеличиваются (e>0 и ce<0); выход ОУ (управляемая величина) больше установившегося значения, но ее значения увеличиваются (e<0 и ce>0). В этих случаях желательно, чтобы управляющее воздействие оставалось на том же уровне в надежде на то, что выход ОУ сам по себе с течением времени медленно достигнет установившегося значения.
Еще одна возможность для формулировки правил связана с построением контроллера для управления нелинейной моделью, используя функцию Ляпунова. Пусть объектом управления служит одно звено робота, движение которого можно представить нелинейным дифференциальным уравнением
,
где - угол отклонения звена относительно вертикали; M - момент, развиваемый двигателем постоянного тока; , - соответственно масса и момент инерции звена; - длина звена. В этом примере цель управления состоит в обеспечении нулевого значения угла . При =0, полагая , получаем линеаризованное уравнение объекта
Обозначая , запишем уравнения в переменных состояния
Для построения регулятора воспользуемся теорией устойчивости Ляпунова и рассмотрим в качестве кандидата на функцию Ляпунова положительно определенную функцию
.
Для обеспечения устойчивости нулевого угла отклонения маятника производная от этой функции по времени
должна быть отрицательно определенной функцией, т.е. <0.
Рассмотрим случай . Тогда < 0, если . Это условие применительно к моменту выполняется при , если , и при если Рассмотрим теперь случай Тогда < 0, если Последнее условие выполняется для , если , и для если . Исходя их этих условий нетрудно придти к следующим правилам для нечеткого контроллера
1. Если > 0 и > 0, то < 0.
2. Если > 0 и 0, то = 0.
3. Если 0 и >0, то = 0.
4. Если 0 и 0, то > 0,
гарантирующим устойчивость нулевого состояния равновесия звена робота.

 >0) положительны, то это означает, что управляемая величина уменьшается и удаляется от требуемого установившегося значения. Поэтому надо приложить к ОУ положительное управляющее воздействие (u>0). Путем подобных рассуждений приходим к четырем правилам:
>0) положительны, то это означает, что управляемая величина уменьшается и удаляется от требуемого установившегося значения. Поэтому надо приложить к ОУ положительное управляющее воздействие (u>0). Путем подобных рассуждений приходим к четырем правилам:
 ,
, - угол отклонения звена относительно вертикали; M - момент, развиваемый двигателем постоянного тока;
- угол отклонения звена относительно вертикали; M - момент, развиваемый двигателем постоянного тока;  ,
,  - соответственно масса и момент инерции звена;
- соответственно масса и момент инерции звена;  - длина звена. В этом примере цель управления состоит в обеспечении нулевого значения угла
- длина звена. В этом примере цель управления состоит в обеспечении нулевого значения угла  , получаем линеаризованное уравнение объекта
, получаем линеаризованное уравнение объекта
 , запишем уравнения в переменных состояния
, запишем уравнения в переменных состояния

 .
.
 <0.
<0. . Тогда
. Тогда 
 . Это условие применительно к моменту
. Это условие применительно к моменту  выполняется при
выполняется при  , если
, если  , и при
, и при  если
если  Рассмотрим теперь случай
Рассмотрим теперь случай  Тогда
Тогда  Последнее условие выполняется для
Последнее условие выполняется для  , и для
, и для  . Исходя их этих условий нетрудно придти к следующим правилам для нечеткого контроллера
. Исходя их этих условий нетрудно придти к следующим правилам для нечеткого контроллера > 0 и
> 0 и  > 0, то
> 0, то  0, то
0, то  0 и
0 и