Существуют, по меньшей мере, четыре источника для того, чтобы найти правила управления.
· Опыт экспертов и знания специалистов в области управления. Классический пример, приведенный в литературе, использование руководства для оператора по обслуживанию печи по отжигу цемента. Самый общий путь к составлению такого набора эмпирических правил – опрос экспертов и/или операторов, используя тщательно подготовленный вопросник.
· Изучение управляющих действий оператора. Правила если - то могут быть написаны путем наблюдения за управляющими действиями оператора или изучения журнала учета этих действий. Правила отражают связи типа вход-выход.
· Используя нечеткую модель объекта управления. Лингвистические базовые правила в ряде случаев можно рассматривать как инверсную (обратную) модель объекта управления. При этом нечеткие правила управления могут быть найдены путем инверсии нечеткой модели объекта управления. Хотя применение этого метода ограничено системами относительно невысокого порядка, он обеспечивает явное решение поставленной задачи в предположении, что доступна нечеткая модель объекта управления. Другой возможный подход связан с нечеткой идентификацией или с управлением, основанным на нечеткой модели объекта.
· Используя обучение. Самоорганизующийся контроллер является примером нечеткого контроллера, который сам находит правила управления. Нейронные сети – другая возможность.
При проектировании нечетких систем управления неприменимы такие методы, как метод корневого годографа, метод логарифмических частотных характеристик, метод размещения полюсов или обеспечения запасов устойчивости, т.к. базовые правила почти всегда приводят к нелинейному контроллеру. Поэтому мы намерены здесь дать описание основных компонентов и функций нечетких контроллеров, чтобы вы могли ориентироваться и понимать различные опции коммерческих пакетов по проектированию нечетких систем управления. Существует достаточное количество литературы по нечеткому управлению и несколько коммерческих пакетов, но нет единой терминологии, что является в ряде случаев причиной недоразумений.
Имеются характерные специфические компоненты (элементы) нечеткого
контроллера, обеспечивающие процедуру проектирования. На блок-схеме
нечеткий статический преобразователь (рис. 2.5), другое название система нечеткого логического вывода (Fuzzy Inference System (FIS)), расположен между блоком препроцессора и блоком постпроцессора. Ниже опишем назначение каждого из блоков, представленных на этом рисунке.
Входные сигналы нечеткого контроллера являются результатом
физических или, другими словами, четких измерений величин, полученных от датчиков, а не лингвистические переменные, другими словами, содержат
Рис. 2.5
количественную информацию. Препроцессор, первый блок на рис. 2.5, подвергает обработке сигналы измерений перед тем, как они поступят на вход статического преобразователя (статического контроллера). Примерами предварительной обработки могут служить следующие операции:
· дискретизация и квантование по уровню (округление до целых чисел);
· нормализация или масштабирование входных сигналов с той целью, чтобы эти сигналы не выходили за пределы определенного стандартного диапазона;
· фильтрация с целью подавления шума;
· усреднение, чтобы выявить тенденции поведения входных сигналов в близком или далеком будущем;
· комбинация нескольких измерений, чтобы выделить ключевые измерительные сигналы;
· дифференцирование и интегрирование или их дискретные эквиваленты, например дискретный интегратор, вычислитель первой разности (дискретный дифференциатор).
Квантование по уровню необходимо, чтобы преобразовать входной сигнал с целью определить самый лучший шаг квантования по уровню в дискретном универсуме. Пусть, например, переменная ошибкаe принимает значение 4,5. Однако дискретный универсум является множеством u = [-5 -4 …0…4 5]. При этом квантователь должен округлить значение 4,5 до 5, ближайшего целого значения. Квантователь позволяет уменьшить число возможных различных значений, снимаемых с его выхода, по сравнению с входными данными. Однако слишком грубое квантование (квантование с большим шагом квантования по уровню) может повлечь за собой возникновение в системе незатухающих колебаний в окрестности желаемого состояния равновесия системы или даже неустойчивость системы.
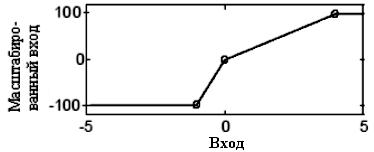
Нелинейное масштабирование является опцией (необязательной операцией). В нечетком контроллере Шмидта контроллер запрашивает у оператора 3(три) числовых значения для малого, среднего и большого по величине измерения соответственно. Эти значения определяют точки излома кривой, с помощью которой масштабируются входные измерения (рис. 2.6). Общий эффект можно интерпретировать как искажение первоначального нечеткого множества. В дальнейшем такой эффект может стать причиной затруднений, связанных как с масштабированием, так и с усилением сигнала в контроллере, что, в свою очередь, затрудняет настройку последнего.
Рис. 2.6
Если входным сигналом нечеткого контроллера является ошибка e, закон управления может быть представлен в виде статической характеристики, u=f(e),связывающей выходной u и входной e сигналы контроллера. Динамический контроллер должен иметь дополнительные входные сигналы, например, производные, интегралы от ошибки или прошлые измерения ошибки и выхода. Такие дополнительные сигналы вырабатываются в препроцессоре. При этом получаем многомерный контроллер (контроллер с несколькими входными сигналами). Проектирование подобного контроллера связано с применением большего числа базовых правил и является более сложным, чем проектирование контроллера с одним входным сигналом. Выходной сигнал препроцессора поступает на вход статического нечеткого контроллера.



 должен иметь дополнительные входные сигналы, например, производные, интегралы от ошибки или прошлые измерения ошибки и выхода. Такие дополнительные сигналы вырабатываются в препроцессоре. При этом получаем многомерный контроллер (контроллер с несколькими входными сигналами). Проектирование подобного контроллера связано с применением большего числа базовых правил и является более сложным, чем проектирование контроллера с одним входным сигналом. Выходной сигнал препроцессора поступает на вход статического нечеткого контроллера.
должен иметь дополнительные входные сигналы, например, производные, интегралы от ошибки или прошлые измерения ошибки и выхода. Такие дополнительные сигналы вырабатываются в препроцессоре. При этом получаем многомерный контроллер (контроллер с несколькими входными сигналами). Проектирование подобного контроллера связано с применением большего числа базовых правил и является более сложным, чем проектирование контроллера с одним входным сигналом. Выходной сигнал препроцессора поступает на вход статического нечеткого контроллера.