1. Данилов Н.Н. Курс математической экономики : учеб. пособие для вузов / Н.Н.Данилов .— М. : Высш. шк, 2006 .— 407с. : ил. (7)
2. Елисеева И.И. Эконометрика : учебник для вузов / И.И.Елисеева [и др].; под ред. И.И. Елисеевой .— 2-е изд., перераб.и доп. — М. : Финансы и статистика, 2008 .— 576с. : ил. (12)
3. Кузык Б.Н. Прогнозирование, стратегическое планирование и национальное программирование : учебник / Б.Н. Кузык, В.И. Кушлин, Ю.В. Яковец .— 2-е изд., перераб. и доп. — М. : Экономика, 2008 .— 575 с. : ил. (12)
4. Строгалев В.П. Имитационное моделирование : учеб. пособие для вузов / В.П. Строгалев, И.О. Толкачева .— М. : Изд-во МГТУ им. Н.Э. Баумана, 2008. — 280с. : ил. (5)
Дополнительный:
1. Проблемы прогнозирования.
2. Российская академия наук. Математическое моделирование / РАН.
3. Теория вероятностей и ее применение / Российская академия наук.
4. Эконометрика [Электрон. ресурс] : учебно мультимедийный компьютерный курс .— Multimedia (110MB) .— М. : Диполь, 2007 .— 1 опт. диск (CD ROM) .— (Вузовская серия) .— Windows 95/98/ME/NT/XP/2000.
Вид моделирования
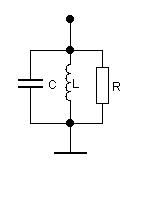
Математическое моделирование базируется на общности дифференциальных уравнений, описывающих процессы в модели и оригинале.
Пусть конкретная физическая система описывается обыкновенным дифференциальным уравнением второго порядка
(1)
где:
-функция времени,
-зависимая переменная,
-независимая переменная,
-коэффициенты,
-функция, играющая роль возмущения действующего на систему.
Если, уравнение (1) описывает физическую систему(оригинал, для которого необходимо построить модель), то в качестве математического описания такой модели можно записать следующее дифференциальное уравнение.
(2)
Общность уравнений описывающих оригинал (1) и модель (2) требует использования дифференциальных уравнений одного порядка и совпадающих структур их записи, допускаются лишь различия в значениях параметров(коэффициентов системы). Использование в качестве модели уравнение (2) основано на следующих свойствах зависимой переменной U(t) коэффициентов системы au bu:
1)удобство задания, изменения и измерения переменных,
2)возможности масштабирования коэффициентов модели au bu.
Вычислительная среда для реализации
(моделирования) уравнения (2).
Преобразуем уравнение (2) в систему дифференциальных уравнений первого порядка, введя следующие обозначения:
(3)
Решением системы (3) будут функции r(t) и U(t).начальные условия:
Если в качестве вычислительной среды использовать аналоговые вычислительные машины (АВМ), то можно определить минимальный набор решающих элементов, достаточный для решения системы (3). Рассмотрим решающие элементы линейного типа, введя следующие пиктограммы для их описания.
Интегратор
r(t)
Множитель переменной величины … на постоянный коэффициент
r(t) Aur(t)
Сумматор переменных величин
r(t)
r(r)+U(t)
U(t)
Инвертор
U(t) -U(t)
Задачек
F(a,b,U,t)
Используя обозначения решающих элементов, представим решение системы (3) в выбранной вычислительной среде в виде структурной схемы моделирования задачи.
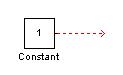
Источниками информации для данной вычислительной среды являются обязательные для решения системы (3) не нулевые начальные условия (задача Коши).
Предполагая, что полученная структурная схема правильно отображает решение системы (3) и генерирует на выходах лишь её решений, используя их значения в качестве начальных приближений входной информации для этой схемы.
Математическое моделирование является универсальным средством получения решений инженерных задач, которые нельзя описать с использованием классических средств высшей математики.
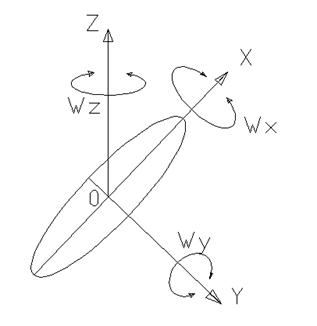
Математическое моделирование объектов и систем
автоматического управления движением морских надводных средств (МНС).
1. Математические модели свободного (неуправляемого) движения МНС.
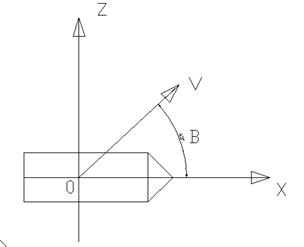
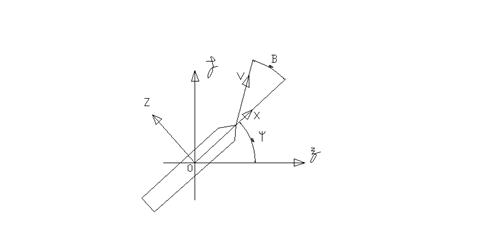
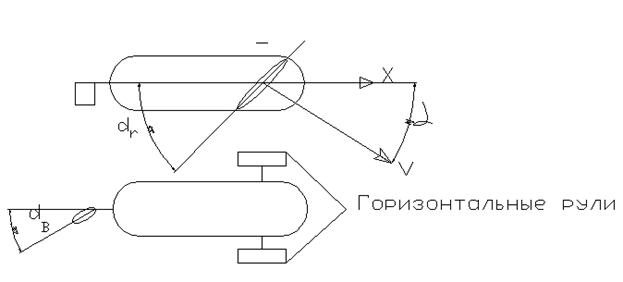
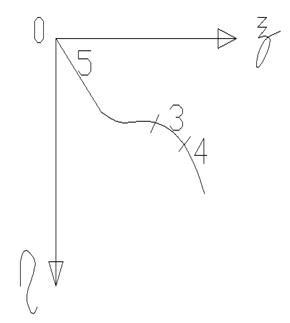
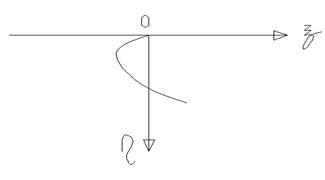
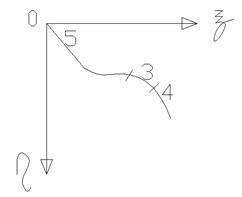
Системы координат используемые в математической модели.
-условно неподвижная, стартовая система координат, в начале которой расположена точечная модель МНС, используемая для отображения траектории движения МНС.
Плоскость ориентированна горизонтально, то есть лежит на поверхности воды.
ZOX -система координат, связанная с центром величины МНС.
OX-продольная ось МНС
OZ-поперечная ось МНС
V-вектор линейной скорости МНС
-угол дрейфа (скольжения) – угол между текущим направлением вектора V (если лежит в плоскости XOZ) и продольной осью МНС
ЕслиМНС движется поступательно в направлении ОХ
В зависимости от направления вектора V МНС вращается вокруг оси ОУ с угловой скоростью .
Математические модели поступательного
и вращательного движения МНС.
Используя аппарат обыкновенных дифференциальных уравнений поступательного движения МНС можно записать в виде:
(4)
-постоянные коэффициенты определяющие: геометрические, весовые и гидродинамические характеристики МНС
Свободное вращательное движение МНС описывается уравнением:
(5)
Совместное решение уравнений (4) и (5) позволяет исследовать свободное движение МНС.
Это решение может быть выполнено различными средствами моделирования. Исследуем динамику свободного движения МНС, используя аналоговую вычислительную среду. Для этого обе части уравнений (4) и (5) умножим на dt и выполним интегрирование этих частей.
(6)
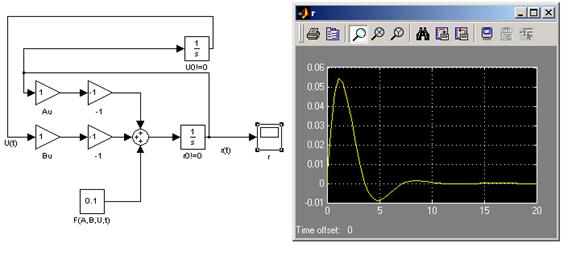
Для исследования свободного движения МНС описываемого системой (6) построим структурную схему моделирования с использованием библиотечных решающих модулей Simulink пакета Mat lab.
При нулевых начальных условиях эта схема не информативна. Если хотя бы одно из начальных условий не равнялось нулю, то возможно по результатам моделирования оценить свободное движение МНС.
2. Построение цифровой модели свободного движения МНС.
Если в качестве инструмента построения модели используют алгоритмические языки, то исходная аналитическая модель (уравнения (4) и (5)) должна быть преобразована к виду, допускающему программирование нашей задачи.
Для получения конечноразностных уравнений, дифференциалы зависимых переменных в уравнениях (4) и (5) представим в виде первых разностей.
i-целочисленная переменная, выполняющая функцию дискретного времени.
Разнесём в левую и правую части уравнений переменные с различным дискретным временем, тогда система конечноразностных уравнений, подготовленная к программированию, имеет вид:
(7)
Система (7) представляет собой циклическую процедуру, в пределах которой i=0,1,…,n с использованием метода численного интегрирования Л. Эйлера исследовать качество свободного движения МНС.
Блок Схема реализации алгоритма 7
3
6
(14)
(12)
(9) (10)
(5) (4)
(3)
(2)
9
10
нет
Да
нет
Да
(14) (14)
(13) (2)
нет
Да
Комментарий: численное интегрирование конечноразностных уравнений свободного движения МНС должно обеспечить требуемую точность решения. Инструментом для этого является выбор шага интегрирования h, для линейных моделей справедливо условие: чем меньше h, тем больше точность. Режим свободного движения определяется начальными условиями и может привести к двум областям решения задачи: 1) устойчивые решения (допустимые), 2)не устойчивые решения.
Если заданный объект МНС не удовлетворяет техническим требованиям задачи, то исследования могут быть продолжены с другими аналогичными объектами.
Математическая модель управляемого движения МНС.
Система дифференциальных уравнений
описывающее управляемое движение МНС.
Дополним правые части уравнений динамики МНС слагаемыми, эмитирующими целенаправленное воздействие на объект.
(1)
(3)
-постоянные коэффициенты, характеризующие взаимосвязь объекта и системы управления.
-управляющая функция измеряемых параметров вектора состояния системы.
-курс МНС.
-стартовая система координат.
-курс, угол между условно неподвижной осью и текущим положением продольной оси ОХ.
Для получения информации о текущем значении курса, систему уравнений (1) дополняют уравнением связи, которое описывает кинематическую связь между курсом и угловой скоростью.
(2)
Система (1) и уравнение (2) решают совместно, дополняя дифференциальные уравнения конкретным значением функции управления (3).
Общий вид решения задачи управляемого движения МНС.
Совместное решение системы (1) с уравнениями (2) и (3) возможно различными способами.
Первый способ базируется на решении задачи Коши и требует задание начальных условий.
Н.У.
(4)
Случай конкретизации правой части 4-го уравнения системы (4) можно рассматривать как вариант решения задачи управляемого движения МНС.
Характеристика линейных управляющих функций для МНС.
Линейные функции управления МНС.
№
Вид маневра
Заданные параметры
Измеряемые параметры
Управляющая функция
Параметр, характеризующий качество движения
Движение МНС по дуге окружности
-зависит качество движения МНС
Выход МНС на заданный курс
Стабилизация МНС на заданном курсе
,
,
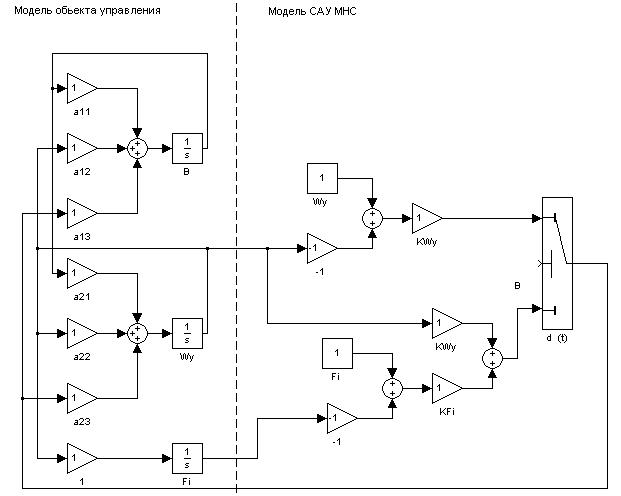
Структурная схема моделирования управляемого движения МНС с использованием линейных функций
Моделирование процесса отображения траектории МНС с использованием нелинейных дифференциальных уравнений.
Для отображения траектории МНС используем совмещённые системы координат.
-вектор линейной скорости
-угол дрейфа
Проекции вектора линейной скорости на оси связанные с ним системы координат.
(1)
Источником переменной является математическая модель объекта управления. Система (1) будет использоваться при построении математической модели отображения траектории движения МНС. Эта модель представляет собой систему нелинейных дифференциальных уравнений.
(2)
Для решения системы (2), её дополняют начальными условиями.
рассмотрим возможные формы записи решения уравнений системы (2). Если использовать решающие элементы аналогового типа, то решение записывается в виде:
(3)
Аналитическая форма записи позволяет сформировать два одномерных массива.
-траектория.
В качестве альтернативы решения системы (3) используют конечноразностное представление дифференциальных уравнений системы (2). Заменяя в системе (2) дифференциал зависимых переменных, можно систему (2) записать в конечноразностной форме.
(4)
Если скорость МНС задана постоянной, то для решения системы (4) в качестве источника информации о текущих значениях углов дрейфа и курса, выбирают математическую модель объекта управления.
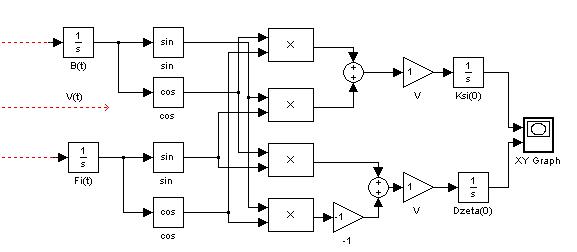
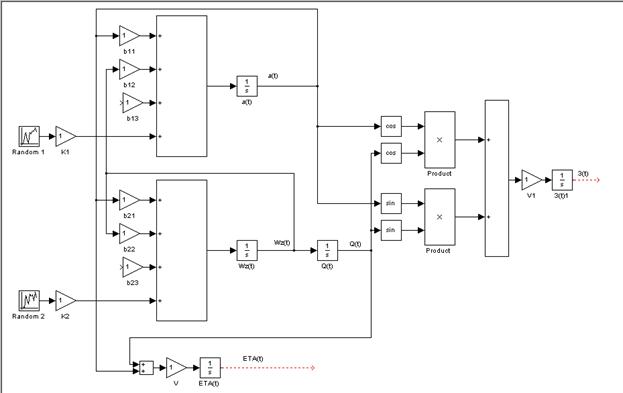
Более наглядным способом представления процесса решения является разработка структурной схемы моделирования задачей (3). Она включает:
1) источник входных данных (),
2) задатчик скорости МНС (V),
3)совокупность линейных и нелинейных решающих элементов для реализации подынтегральных функций в выражениях (3),
4) средства графического отображения результатов решения системы (3).
Мат модель Структура не линейной части мат. модели МПС
Данная структурная схема моделирования относится к классу разомкнутых схем, так как на её функциональных выходах формируются две зависимости.
Нелинейные функции управления в задаче
моделирования манёвров МНС.
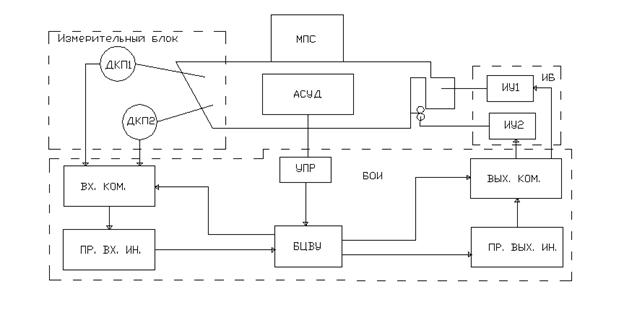
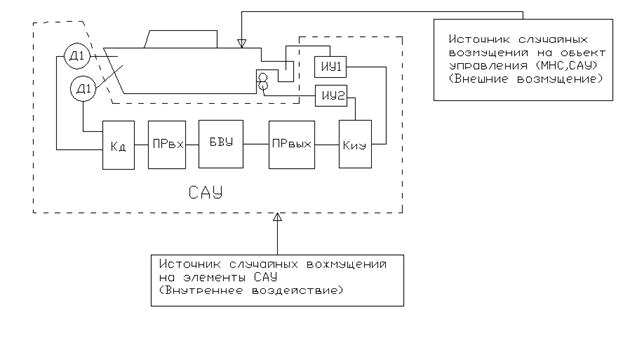
Структура системы автоматического управляемого движения МНС
АСУД-автоматическая система управления движением
УПР-устройство прерываний
СПР-сигнал прерывания
БЦВУ-бортовое цифровое вычислительное устройство
СС-сигнал синхронизации
ДКП-датчики кинематических параметров
ИУ-исполнительное устройство
Вх. (Вых.) Ком. - входной (выходной) комутатор
Пр. Вх. (Вых.) инф. - преобразователи входной (выходной) информации
АСУД МНС включает следующие подсистемы:
-измерительный блок,
-исполнительный блок,
-бортовой обработчик информации (БОИ).
Измерительный блок.
Полнота и точность описания информации об объекте управления являются основными характеристиками этого блока. В данном случае вектор состояния системы … содержит только два, измеряемых на борту МНС, компонента … и … . математические модели этого блока будут представлены в следующих версиях описания системы.
Исполнительный блок.
Является преобразователем сигнальной информации, получаемой от бортового обработчика в силы и моменты, воздействующие на объект управления.
БОИ во взаимодействии с другими системами МНС обеспечивает реализацию алгоритма автоматического управления движением МНС.
УПР обеспечивает мультипрограммный режим работы в случаи однопроцессорного БОИ или управляет распределёнными вычислительными ресурсами, в зависимости от их приоритетов.
Коммутаторы, управляемые БЦВУ с использованием каналов синхронизации, обеспечивают заданную последовательность получения входной информации и выработки выходной сигнальной информации. Преобразователи входной (выходной) информации, кроме функции масштабирования, обеспечивают БЦВУ сигнальной информации принятой размерности.
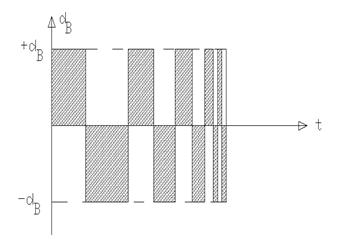
Заштрихованная площадь характеризует работу, выполняемую исполнительным устройством, которая реализует нелинейную функцию управления.
Рассмотрим вариант нелинейных управляющих функций и способы их математического описания.
Не линейные функции управления
Движение МНС по дуге окружности
,
Выход МНС на заданный курс
,
Для программирования управляемого движения с использованием нелинейных функций необходимо:
-выбрать нужную функцию исходя из требуемого манёвра МНС,
оценить знак и величину параметра, регулируемого в данной ситуации,
-в качестве ограничения выбрать максимальное значение управляющей функции ,
-выбрать величину коэффициентов , для конкретной функции управления, которая минимизировала бы основные показатели переходного процесса для регулируемого параметра.
Компьютерное моделирование сложных манёвров МНС.
Для решения поставленной задачи, линейная модель объекта управления дополняется нелинейной функцией.
(5)
Исследование модели управляемого движения объекта МНС
при различных режимах его маневрирования.
Для решения сформулированной задачи необходимо преобразовать исходную модель (систему уравнений (5)) к виду, адекватному используемому инструменту моделирования. Если в качестве такого инструмента выбрана система Simulink, то требуемые преобразования имеют вид:
(1)
(2)
В системе (5) изменим, последовательность записи уравнений, в качестве первого уравнения запишем управляющую функцию, которая соответствует исследуемому манёвру МНС. При других манёврах это уравнение должно быть заменено с учётом конкретного действия МНС.
При первом использовании системы (1) , при повторном использовании системы (1), (2).-время конца манёвра. Условие (2) обеспечивает непрерывность.
Управление сменой манёвров обеспечивается переключателями (см. структурную схему моделирования). Период времени, в течении которого решается система (1), может быть представлен в виде двух составляющих: 1) переходный процесс, 2) режим стабилизации движения.
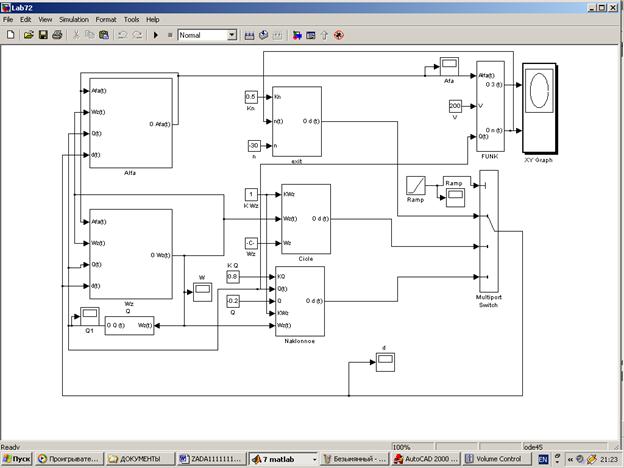
Структура модели для реализации системы (1).
Структурная схема модели управления движением МНС предназначена для параметрического анализа САУ с идеальными измерительными и исполнительными устройствами, под которыми понимаем: датчики и рулевые устройства МНС, работающие без ошибок. Под параметрическим анализом САУ понимаем выбор таких значений параметров управляющих функций, как: ,которые обеспечили бы минимальные характеристики переходных процессов в системе на каждом манёвре МНС. В качестве одного из критериев построения работоспособной системы, в модели используется траектория движения МНС, которая сравнивается с заданной траекторией.
Исследование управляемого движения МНС
алгоритмическим методом.
Для реализации алгоритма управления движением МНС систему уравнений (5) запишем в конечноразностной форме.
h-шаг численного интегрирования системы (5)
(3)
Для линейных дифференциальных уравнений h=0.1-0.25 с. для нелинейных дифференциальных уравнений h=0.005-0.01 с. Алгоритм (3) описывает циклическую процедуру, параметром цикла является целочисленное «время» i=0, …, n. Этот параметр может быть конечным (n=const), или же алгоритм (3) может работать как итерационный цикл, выход из которого осуществляется по заданной точности …
Блок-схема реализации алгоритма 3
(7) (15) (16) (17)
(6) (6) (5) (4)
11
Да
нет
(12) (13) (14) (15) (16) (17)
(11) (8) (7) (6) (5) (4)
Да
нет
нет
Да
нет
Да
(16) (16) (17)
(15) (5) (4)
нет
Да
нет
Да
Блок схема реализации алгоритма управления движением МНС позволяет:
-структурировать входную информацию моделей для организации интерактивного взаимодействия будущего пользователя, с программной средой,
-управлять параметрами объекта и системы управления для достижения требуемых показателей качества САУ,
-привить пользователю навыки отладки программ для конкретной предметной области.
Модели измерительных устройств в САУ.
Корректность и полнота описания сложных технических систем с помощью математических моделей достигаются вводом в идеальную исходную модель реальных характеристик измерительных и исполнительных устройств.
Измерительные устройства.
К простейшим моделям измерительных устройств относят их статические характеристики, описываемые графически или аналитически.
Преобразователь информации
k-коэффициент передачи измерительного устройства.
Измерительное устройство, как преобразователь информации, унифицирует размерность выходных сигнальных данных, согласуя её с требованиями обработчика информации. Диапазон выходной сигнальной информации измерительного устройства должен быть согласован с возможностями её восприятия современными процессорами. Реальные измерители характеризуются разбросом значений масштабных преобразований, которые указаны в технических характеристиках измерителя.
Математические модели измерителей
кинематических параметров объекта управления.
Физические измерители, как правило, представляются нелинейными математическими моделями, которые учитывают:
-невозможность измерения малых значений входных переменных,
-ограниченный диапазон линейного соответствия измеряемой величины и измеренного значения параметра,
-сочетание этих свойств.
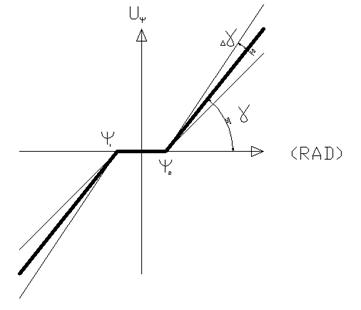
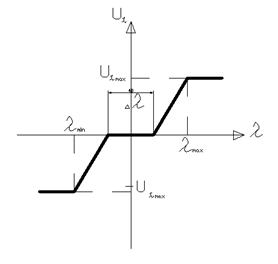
Статическая характеристика измерения угла (курса).
Если -коэффициент передачи измерительного угла, то разброс значений этого коэффициента характеризует точность измеряемых параметров. Чем меньше разброс угла, тем больше точность измерителя. -зона нечувствительности измерительного прибора, его характеристики (величина и симметрия) задаются в качестве параметров этого прибора.
Измеритель угловой скорости.
Для сохранения линейности измерения физической величины в диапазоне используют прецизионные измерительные приборы, однако линейность измерителя ограничивается по физическим соображениям и требует задания динамического диапазона, в котором она присутствует.
Математические модели измерительных приборов используют задачи параметрического анализа для:
1) определения численных значений параметров измерителей, обеспечивающих требуемое качество регулируемых процессов,
2) задания требований к приборам управления, которые совместно с другими подсистемами могут удовлетворительно решать задачу управляемого движения.
Математическая модель исполнительного устройства.
В качестве исполнительного устройства МНС как правило используют электромеханические рулевые машины (рулевой привод). Их математические модели могут быть описаны следующими характеристиками: использование подобной характеристики позволяет воспроизводить явление люфта в механических передачах и гистерезиса в электромагнитном устройстве, которыми воспроизводятся исполнительные механизмы МНС.
Вероятностные математические модели управляемого движения МНС.
Для учета влияния случайных возмущений на работоспособность математических моделей МНС используют генераторы случайных функций (ДСЧ – датчики случайных чисел), информацию от которых вводят в каналы измерения САУ, при этом регистрируется реакция системы на подобные случайные воздействия.
ЧАСТЬ 2
Компьютерное моделирование
морских подводных средств (МПС).
МПС – АС осуществляющие пространственное перемещение для решения целевых задач определённых им назначений.
Декомпозиция пространственного движения под водой.
Если совместить плоскость XOZ с поверхностью воды, то МПС трансформируется в МНС и к нему могут быть применимы все модели и способы управления характерные для МНС.
Для упрощения математического описания модели МПС его пространственное движение будем рассматривать как совокупность некоторых плоских эволюций:
- в плоскости XOZ (горизонтальная плоскость) этим эволюциям соответствуют законы управления используемые в МНС;
- в плоскости XOY (вертикальная плоскость) будут выведены оригинальные законы управления;
- в плоскости ZOY сделаем предположение, что эволюции МПС незначительны, то есть скорость изменения угла крена , сам угол крена мал.
Если предположить, что в состав автоматической системы МПС входит система креновыравнивания, обеспечивающая стабилизацию нулевого крена, то пространственное движение МПС можно представить как композицию двух эволюций (движений): 1) маневрирование в плоскости XOZ (канал курса), 2) маневрирование в плоскости XOY (канал глубины и дифферента).
Математическая модель свободного движения МПС
в вертикальной плоскости.
-условно неподвижная (стартовая) система координат, у которой ось лежит на поверхности воды, -глубина погружения МПС.
XOY-связывает с МПС систему координат,
V-вектор линейной скорости МПС,
-угловая скорость,
-угол дифферента.
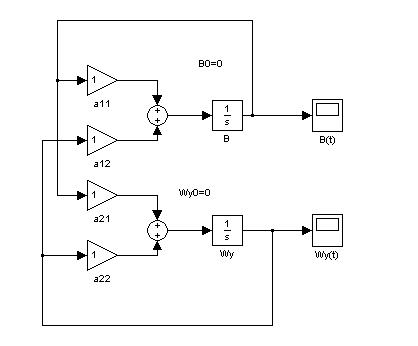
Уравнения динамики свободного (неуправляемого) движения МПС.
Перемещение МПС в вертикальной плоскости … представим в виде поступательного и вращательного движений, которым соответствуют следующие дифференциальные уравнения.
(1)
B-матрица МПС, коэффициенты которой … содержат информацию о геометрических, весовых, гидродинамических характеристиках МПС.
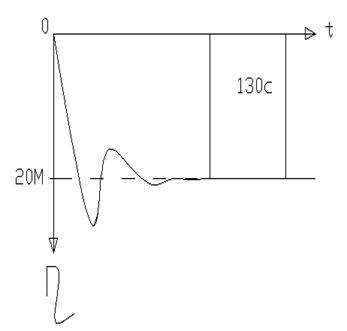
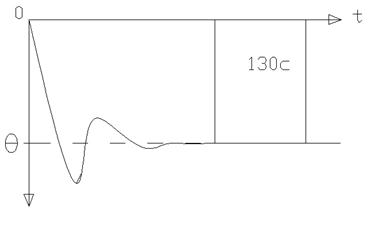
Исследование модели свободного движения МПС.
Проводится для оценки устойчивости движения МПС в вертикальной плоскости и с целью выбора для этого объекта требуемых функций управления.
(2)
-не устойчивое движение МПС
- устойчивое движение МПС
При решении системы (2) с использованием аналоговой вычислительной техники структура модели может иметь вид.
Решение системы (1) средствами цифровой вычислительной техники.
(3)
Выбор соотношения числа шагов i численного интегрирования системы (3) и значение … определяет точность и период наблюдения решения задачи.
Управляемое движение МПС.
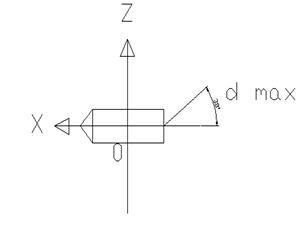
В качестве управляющих воздействий, сообщаемых САУ объекту МПС, будем рассматривать силы и моменты, возникающие на горизонтальных рулях в процессе его движения.
-угол перекладки горизонтальных рулей МПС
-угол перекладки вертикального руля МПС.
Уравнения управляемого движения МПС.
(1)
данные дифференциальные уравнения должны быть дополнены уравнением выполняющем роль управляющей функции.
Функция управления F в системе (1) зависит только от измеряемых компонент вектора состояния.
Дополним систему (1) начальными условиями.
Решение задачи управляемого движения МПС может быть реализована различными средствами.
Аналитическое решение системы (1).
(2)
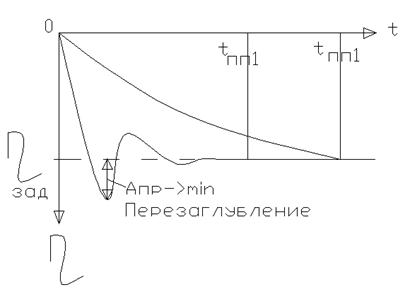
Решение системы (2) позволяет оценить качество управляемого движения МПС. С точки зрения технических характеристик устройство управления глубиной МПС: чем меньше время переходного процесса, тем лучше для быстродействующих МПС.
Для автоматизированных МПС предпочтительнее отсутствие перерегулирования при произвольном значении времени переходного процесса.
Решение системы (2) не позволяет сделать вывод о том, какое конкретное маневрирование выполняет МПС, так как функция управления F задана в общем, виде. Конкретизируем выражения для управляющей функции F и сопоставим их с конкретным движением МПС.
Линейные управляющие функции МПС.
№
Вид маневра
Измеряемый
параметр
Заданный параметр
Функция МПС
Параметры, характеризующие качество управления
Выход МПС на заданную глубину
Выход МПС на заданную глубину с малым дифферентом
Циркуляция в вертикальной плоскости
Наклонное движение МПС
Стабилизация глубины МПС
Нелинейные управляющие функции МПС.
Выход МПС на заданную глубину
Наклонное движение МПС
Стабилизация наклонного движения МПС
Движение МПС на заданной глубине с малым ходовым деферентом
Циркуляция в вертикальной плоскости
Стабилизация глубины движения МПС
При моделировании произвольной траектории движения МППС её аппроксимируют (заменяют) элементарными траекториями (см. вид манёвра). При этом в системе уравнений (1) управляющая функция F принимает вид правой части (выражения в графе – функции управления МПС). Время замены управляющей функции стремиться к нулю, но на практике моменту смены управляющей функции предшествует процедура оценки качества стабилизации регулируемого параметра.
Для обеспечения непрерывности реальной траектории движения МПС необходимо фиксировать моменты завершения переходных процессов и прибавлять их значения заданным временам стабилизации. При правильном выборе масштаба построения траектории переходные процессы можно наблюдать графически. Однако это не всегда необходимо. Для обеспечения реальной траектории в системе (1) необходимо: вместо первого уравнения в режиме (1) подставить управляющую функцию из таблицы , строка 5. В … для режима 2функцию из строки 3 таблицы. В … для режима 3 функцию из строки 4 таблицы.
Математическая модель для построения траектории МПС.
Используя систему (2) как источник получения функций …, … найдём:
1)проекции вектора линейной скорости МПС на оси системы координат связанной с МПС
2)запишем дифференциальные уравнения, характеризующие функции
(4)
Независимое решение системы (4) невозможно и требует согласованного решения систем (1) и (4). При совместном решении систем (1) и (4), в зависимости от требований точности получения функции используют линейное уравнение (четвёртое уравнение системы (1)) или нелинейное (второе уравнение системы (4)).
Напишем более точную модель.
(5)
Решение задачи маневрирования МПС.
Для выбора состава решающих элементов проинтегрируем систему (5), дополнив её управляющими функциями трёх типов.
(6)
Модель МПС.
Нелинейные функции управления МПС.
Если инерционные свойства объекта управления незначительно влияют на его динамику, то в качестве функций управления рекомендуют использовать нелинейные функции. При этом повышается устойчивость и управляемость МПС при воздействии на него внешних возмущений. Качество управляемого движения в данном случае определяется не только параметрами системы управления, а именно: значение коэффициентов передачи канала глубины , но и характеристиками объекта управления: ограничением на максимальный угол перекладки горизонтальных рулей Для обеспечения требуемого манёвра МПС, прогнозируемую траекторию его движения разбивают на элементарные части, каждой из которых ставят в соответствие одну из функций управления таких средств.
Параметрический анализ системы автоматического управления движением МПС.
Целью параметрического анализа САУ МПС является выделение группы параметров относящихся к измерительной, исполнительной или обрабатывающей частям системы, и нахождение диапазона их изменения, в которых САУ обеспечивает заданное качество управления МПС.
Математические модели измерителей параметров движения МПС.
Будем использовать в качестве таких моделей статические характеристики измерительных приборов, описывая их аналитически или графически.
Измерители глубины:
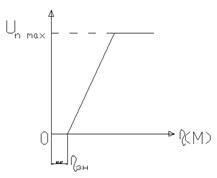
1) линейная статическая характеристика
2) нелинейная статическая характеристика
-зона нечувствительности
-ограничение на линейный диапазон работы измерителя глубины
В качестве параметров нелинейного измерителя глубины будем использовать:
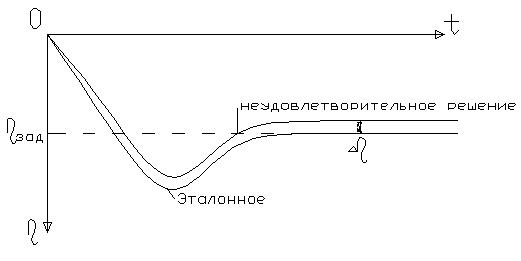
Параметрический анализ измерителя глубины заключается в выборе таких комбинаций, которые обеспечили бы такие характеристики переходных процессов в исследуемом манёвре МПС, которые были бы не хуже характеристик эталонной модели.
Решение задачи параметрического анализа САУ МПС.
Описание математической модели для данной задачи может использовать как систему дифференциальных уравнений (5), так и конечно разностные уравнения. Последнее требует замены дифференциалов зависимых переменных их конечными разностями.
-измеренная глубина в момент времени i
Рассмотрим значения как измеряемые параметры в моменты времени i=0, …, n, запишем систему конечноразностных уравнений в качестве алгоритма для параметрического анализа системы.
(1)
Алгоритм (1) представляет собой циклическую процедуру, в которой выделим две группы параметров. Первая группа относится к обработчику информации() и выбирается по результатам исследования эталонной модели. Вторая группа () относится к измерительной части САУ. В тестовом режиме применяются за одну. Задачу параметрического анализа запишем в виде блок схемы.
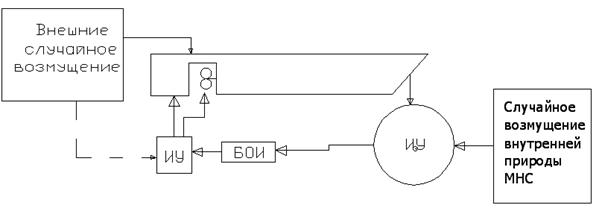
Вероятностные математические модели для исследования свободного и управляемого движения МПС.
Характер случайных воздействий на объект моделирования.
Будем рассматривать два типа источников случайных внешних воздействий.
1. внешние воздействия на объект управления, которые эмитируют окружающую среду (направление и скорость течения, ветровое воздействие, волны).
2. В качестве случайных внутренних возмущений будем рассматривать помехи в информационных каналах САУ, источниками которых являются собственные устройства и механизмы МПС и МНС.
Цель вероятностного моделирования случайных воздействий заключается в математическом описании параметров этих воздействий, и определить их количественные характеристики для оценки степени их влияния на устойчивое функционирование всей системы.
Математическое описание случайных внешних воздействий.
Физическую природу внешних возмущений определим при свободном движении МПС, как случайную силу S или момент M воздействующую на объект управления.
-случайная величина.
Используя обыкновенные дифференциальные уравнения, запишем вероятностную модель свободного движения МПС.
(1)
Способы задания случайных внешних возмущений в вероятностной математической модели.
Так как систему (1) будем решать с использованием компьютерных средств, то в качестве источников и момента будем рассматривать генераторы квазислучайных чисел. Будем использовать следующие генераторы случайных величин:
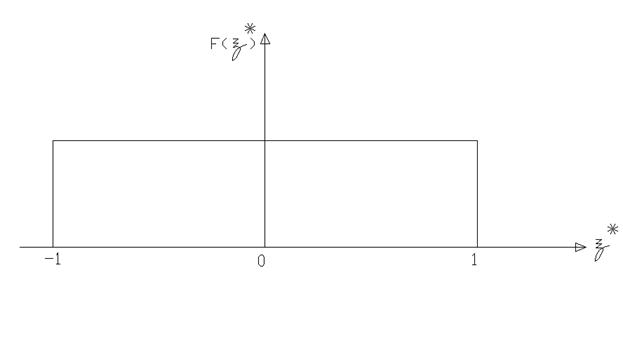
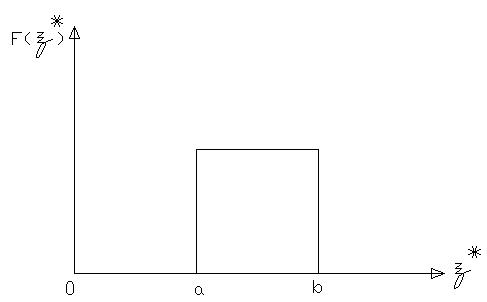
- Генератор, вырабатывающий равномерно распределённые в диапазоне случайные числа;
- Генератор, нормированных равномерно распределённых в диапазоне квазислучайных чисел;
- Генератор, с равномерной плотностью распределения случайных величин в диапазоне …
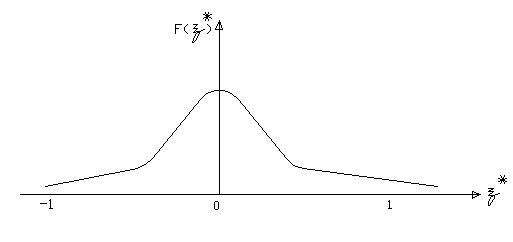
Если о природе случайных возмущений ничего неизвестно, кроме диапазона, определяющего границы случайных величин, то принимается гипотеза о равновероятном распределении этих величин. Если возможно оценить численные характеристики случайного процесса, то принимается гипотеза о нормальном или Гауссовом распределении случайных величин.
Модель для оценки влияния случайных возмущений на
свободное движение МПС.
Эту модель можно записать в интегральной форме или в соответствующей ей структурной схеме.
(2)
Вывод:
Вероятностная модель свободного движения МПС позволяет воспроизвести траекторию МПС, которую он выполняет под воздействием случайной силы и момента.
Моделирование случайных возмущений в САУ в МПС и МНС.
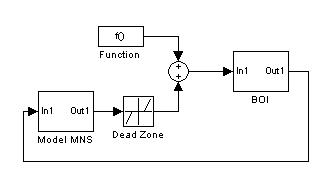
Случайные внутренние возмущения воздействуют, как правило, на каналы передачи измеряемой информации. Поэтому их моделирование относят к системе входного интерфейса САУ. Чтобы в математических моделях случайные возмущения существенно не изменяли измеряемые величины, соответствующие генераторы настраивают со следующими параметрами: …, …- характеризует разброс случайной величины относительно первого момента и задаётся для каждого варианта измерений.
Вероятностная модель управляемого движения МПС.
(3)
Измеренные кинематические параметры управляющей функции получают в качестве слагаемого случайную составляющую, математическое ожидание которых равно нулю, а дисперсию задают в виде постоянной при параметрическом анализе системы.
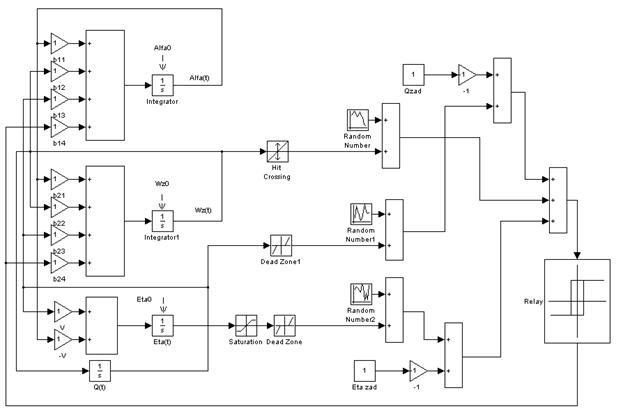
Решение системы (3) представим в виде структурной схемы, в которой выделим области, соответствующие аппаратным составляющим моделируемого компонента.
Параметрический анализ вероятностной модели управляемого движения МПС включает:
- исследование эталонной модели, в которой отключены генераторы случайных помех и получение эталонной траектории движения МПС;
- подключение генератора помех и настройка их параметров, обеспечивающих получение траектории, близкой к эталонной;
- фиксировать критические значения параметров случайных помех, превышение которых приводит к неустойчивому состоянию модели.

 (1)
(1) -функция времени,
-функция времени, -зависимая переменная,
-зависимая переменная, -независимая переменная,
-независимая переменная, -коэффициенты,
-коэффициенты, -функция, играющая роль возмущения действующего на систему.
-функция, играющая роль возмущения действующего на систему.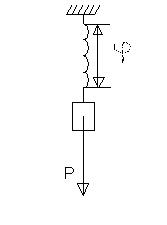
 (2)
(2) (3)
(3)

 Aur(t)
Aur(t)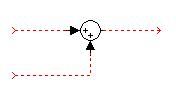 r(r)+U(t)
r(r)+U(t)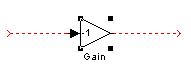
 -условно неподвижная, стартовая система координат, в начале которой расположена точечная модель МНС, используемая для отображения траектории движения МНС.
-условно неподвижная, стартовая система координат, в начале которой расположена точечная модель МНС, используемая для отображения траектории движения МНС.
 -угол дрейфа (скольжения) – угол между текущим направлением вектора V (если лежит в плоскости XOZ) и продольной осью МНС
-угол дрейфа (скольжения) – угол между текущим направлением вектора V (если лежит в плоскости XOZ) и продольной осью МНС МНС движется поступательно в направлении ОХ
МНС движется поступательно в направлении ОХ .
. (4)
(4)
 -постоянные коэффициенты определяющие: геометрические, весовые и гидродинамические характеристики МНС
-постоянные коэффициенты определяющие: геометрические, весовые и гидродинамические характеристики МНС (5)
(5) (6)
(6)
 t=h –дифференциал независимой переменной (шаг численного интегрирования уравнений (4) и (5)).
t=h –дифференциал независимой переменной (шаг численного интегрирования уравнений (4) и (5)). (7)
(7)

 3
3
 6
6



 (14)
(14)




 9
9
 10
10
 Да
Да

 Да
Да

 Да
Да
 (1)
(1)
 (3)
(3) -управляющая функция измеряемых параметров вектора состояния системы.
-управляющая функция измеряемых параметров вектора состояния системы.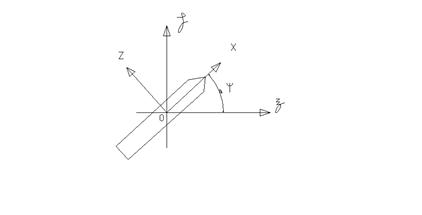
 -стартовая система координат.
-стартовая система координат. и текущим положением продольной оси ОХ.
и текущим положением продольной оси ОХ. (2)
(2)



 (4)
(4)



 -зависит качество движения МНС
-зависит качество движения МНС



 -вектор линейной скорости
-вектор линейной скорости (1)
(1) является математическая модель объекта управления. Система (1) будет использоваться при построении математической модели отображения траектории движения МНС. Эта модель представляет собой систему нелинейных дифференциальных уравнений.
является математическая модель объекта управления. Система (1) будет использоваться при построении математической модели отображения траектории движения МНС. Эта модель представляет собой систему нелинейных дифференциальных уравнений. (2)
(2)
 (3)
(3)
 -траектория.
-траектория. , можно систему (2) записать в конечноразностной форме.
, можно систему (2) записать в конечноразностной форме. (4)
(4)
 ),
),


 для конкретной функции управления, которая минимизировала бы основные показатели переходного процесса для регулируемого параметра.
для конкретной функции управления, которая минимизировала бы основные показатели переходного процесса для регулируемого параметра. (5)
(5) (1)
(1) (2)
(2) , при повторном использовании системы (1), (2).-время конца манёвра. Условие (2) обеспечивает непрерывность.
, при повторном использовании системы (1), (2).-время конца манёвра. Условие (2) обеспечивает непрерывность.
 (3)
(3)




 11
11






 нет
нет

 Да
Да



 Да
Да

 Да
Да



 -зона нечувствительности измерительного прибора, его характеристики (величина и симметрия) задаются в качестве параметров этого прибора.
-зона нечувствительности измерительного прибора, его характеристики (величина и симметрия) задаются в качестве параметров этого прибора.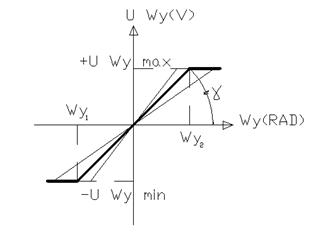
 используют прецизионные измерительные приборы, однако линейность измерителя ограничивается по физическим соображениям и требует задания динамического диапазона, в котором она присутствует.
используют прецизионные измерительные приборы, однако линейность измерителя ограничивается по физическим соображениям и требует задания динамического диапазона, в котором она присутствует.
 -зона нечувствительности,
-зона нечувствительности, -динамический диапазон,
-динамический диапазон, -пределы измеряемой величины,
-пределы измеряемой величины,
 , сам угол крена
, сам угол крена  мал.
мал.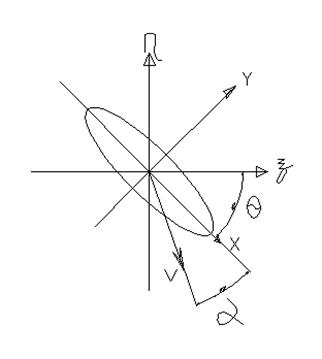
 -условно неподвижная (стартовая) система координат, у которой ось
-условно неподвижная (стартовая) система координат, у которой ось  лежит на поверхности воды,
лежит на поверхности воды,  -глубина погружения МПС.
-глубина погружения МПС. -угловая скорость,
-угловая скорость, -угол дифферента.
-угол дифферента. (1)
(1) (2)
(2) -не устойчивое движение МПС
-не устойчивое движение МПС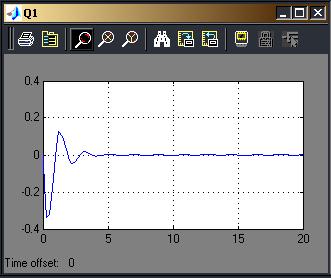 - устойчивое движение МПС
- устойчивое движение МПС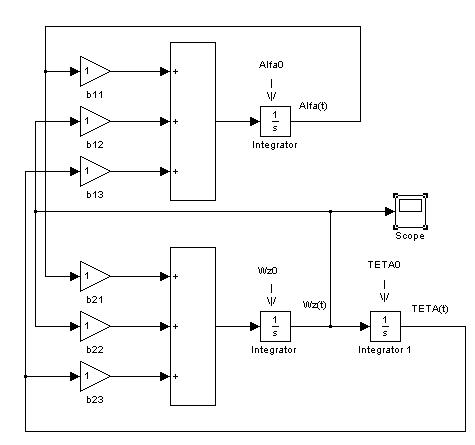
 (3)
(3)
 -угол перекладки горизонтальных рулей МПС
-угол перекладки горизонтальных рулей МПС (1)
(1)

 (2)
(2)



























 (4)
(4)
 (5)
(5)
 (6)
(6)


 -зона нечувствительности
-зона нечувствительности -ограничение на линейный диапазон работы измерителя глубины
-ограничение на линейный диапазон работы измерителя глубины

 -измеренная глубина в момент времени i
-измеренная глубина в момент времени i как измеряемые параметры в моменты времени i=0, …, n, запишем систему конечноразностных уравнений в качестве алгоритма для параметрического анализа системы.
как измеряемые параметры в моменты времени i=0, …, n, запишем систему конечноразностных уравнений в качестве алгоритма для параметрического анализа системы. (1)
(1) ) и выбирается по результатам исследования эталонной модели. Вторая группа (
) и выбирается по результатам исследования эталонной модели. Вторая группа ( ) относится к измерительной части САУ. В тестовом режиме применяются за одну. Задачу параметрического анализа запишем в виде блок схемы.
) относится к измерительной части САУ. В тестовом режиме применяются за одну. Задачу параметрического анализа запишем в виде блок схемы.
 (1)
(1)

 (2)
(2)
 (3)
(3)