Принцип действия канала дальности РСБН. Канал дальности (рис. 9.8) состоит из установленного на ЛА запросчика и наземного ответчика – дальномерного радиомаяка ДРМ. Генератор запросных импульсов ГЗИ вырабатывает сигнал запроса дальности ЗД (два импульса с определенным кодовым интервалом между ними). Сигнал ЗД излучается на частоте . На ДРМ принятый сигнал после обработки в приемнике Прм–О подается на формирователь сигнала ответа ФСО, где изменяется интервал между импульсами. Излучаемый ДРМ на частоте сигнал ответа дальности ОД принимается бортовой аппаратурой ЛА и поступает после приемника Прм–З на цифровой измеритель времени ИВ, который включается в момент излучения ЗД. Измеритель времени вырабатывает код, содержащий информацию о . Задержка сигнала в аппаратуре ДРМ () поддерживается постоянной и учитывается при измерении. Для повышения точности длительности импульсов сигналов ЗД и ОД выбирают в пределах 1…3 мкс.
Рис. 9.8. Структурная схема канала дальности РСБН (а), а также излучаемые и
принимаемые сигналы (б)
Различия кодовых интервалов и несущих частот сигналов ЗД и ОД позволяют повысить помехоустойчивость запросчиков к сигналам запросов других ЛА и предотвратить запуск ДРМ собственными сигналами, отраженными от окружающих его объектов. Для исключения синхронных помех, которые возникают при повторном запуске ответчика сигналом запроса, отраженным от близких к ДРМ объектов, ответчик запирается на некоторое защитное время после приема первого (пришедшего по кратчайшему пути) импульса запроса.
Для определения азимута в РСБН используют либо импульсный, либо фазовый метод. Первый отличается большой точностью, и на его основе строятся отечественные РСБН. Фазовый метод более прост в реализации и применяется в зарубежных системах ближней навигации.
Принцип действия канала азимута, реализующего импульсный метод. Азимутальный радиомаяк АРМ формирует две ДНА в горизонтальной плоскости (рис. 9.9). Диаграмма ДН1 состоит из двух узких (около 4°) лепестков и вращается с частотой об/мин (600 град/с). В пределах этой ДНА излучаются непрерывные немодулированные колебания. Диаграмма ДН2 имеет в горизонтальной плоскости форму, близкую к окружности. С помощью ДН2 излучается опорный сигнал, представляющий собой две кодированные последовательности импульсов. Эти импульсы вырабатывает датчик, связанный с осью вращения антенны, создающей ДН1, и в соответствии с числом импульсов, приходящихся на один оборот ДН1, они называются опорными сигналами 35 («35») и 36 («36»). В момент, когда ось симметрии лепестков ДН1 совпадает с северным направлением меридиана, импульсы обеих последовательностей также совпадают, что служит сигналом начала отсчета времени (северный сигнал ОС) при определении азимута. Импульсы «36» следуют через каждые 10° оборота ДН1.
Рис. 9.9. Диаграммы направленности антенн АРМ (а) и сигналы канала азимута,
реализующего импульсный метод (б, в)
Когда ДН1 проходит через точку приема, на выходе приемника образуется азимутальный сигнал АС, форма которого повторяет форму ДН1. Интервал времени , начало которого соответствует моменту прохождения минимума ДН1 через северное направление, а конец – средней точке азимутального сигнала, содержит информацию об азимуте точки приема
. (9.19)
Для повышения точности отсчет времени производят по азимутальному импульсу АИ, который соответствует той точке среза азимутального сигнала, где крутизна огибающей максимальна. Возникающая при этом систематическая погрешность компенсируется при определении азимута.
Цифровой измеритель азимута РСБН. Для измерения применяют цифровые устройства (рис. 9.10). Поступающие с декодирующего устройства приемника, импульсы «35» и «36» подаются на контрольное устройство КУ, которое в момент их совпадения устанавливает счетчик Сч1 на нуль и разрешает прохождение на него счетных импульсов от генератора ГСчИ. Счетчик Сч1 подсчитывает число импульсов за время и через каждый интервал времени, соответствующий 10°, выдает импульс на счетчик Сч2. Азимутальный импульс АИ закрывает контрольное устройство КУ и разрешает перепись содержимого счетчиков через схемы переписи СП в запоминающие устройства ЗУ. С этих устройств снимается код азимута, так как при известном периоде счетных импульсов их число является мерой азимута . Счетчик Сч1 выполняет функцию точного измерения азимута, а Сч2 – грубого.
Точность импульсного канала азимута. Главный источник погрешностей здесь – сигналы, отраженные от различных объектов (например, от объекта О на рис. 9.11,а). Искажения результатов измерений вызывают те отраженные сигналы, которые создают мешающее напряжение , по времени совпадающее со срезом первого импульса азимутального сигнала АС (рис. 9.11,б). Такая ситуация возможна для объектов, азимут которых лежит в пределах , где – суммарная ширина двух лепестков ДН1.
Рис. 9.11. Положение ЛА и отражателя в пределах диаграммы направленности АРМ (а) и
результат интерференции азимутального и отраженного сигналов (б)
Погрешность измерения азимута при частоте вращения ДН1, равной , и длительности среза импульса АС, равной , составляет
(9.20)
где – приращение напряжения АС в точке отсчета из-за отраженного сигнала, а – амплитуда АС.
Как следует из (9.20), для повышения точности следует уменьшать скорость вращения ДН1 и увеличивать крутизну фронта импульса . Уменьшение приводит к снижению темпа поступления информации и к возможности существенного изменения азимута ЛА за один оборот ДН1. Повышение крутизны достигается сужением ДН1, при этом также уменьшается вероятность одновременного появления отражающего сигнала объекта и ЛА в пределах ДН1. С учетом всех дестабилизующих факторов точность импульсного азимутального канала соответствует .
Принцип действия канала азимута с фазовым методом измерения. Антенная система АРМ (рис. 9.12,а) имеет в горизонтальной плоскости ДНА, форма которой близка к окружности со смещенным относительно АРМ центром. Вращение этой диаграммы с угловой скоростью =30 об/с приводит к амплитудной модуляции принимаемого сигнала с частотой =30 Гц (рис. 9.12,б). В точке с произвольным азимутом фаза огибающей принимаемого АМ азимутального сигнала запаздывает относительно фазы АМ сигнала, принимаемого в северном направлении (точка 1), на , где – время, необходимое для поворота ДН на угол .
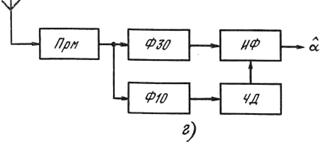
Рис. 9.12. Диаграмма направленности антенны фазового АРМ (а); азимутальные сигналы, принимаемые в точках 1 и 2 (б); спектр принимаемого сигнала (в) и
структурная схема бортовой аппаратуры (г)
Основное уравнение АРМ, реализующего фазовый метод определения азимута, имеет вид
. (9.21)
Измерив фазу огибающей принимаемого сигнала , можно непосредственно определить азимут точки приема. Из (9.21) следует, что , т.е. погрешность определение азимута численно равна погрешности измерения фазы .
Для измерения фазы на ЛА с АРМ передают опорный сигнал, который представляет собой частотно-модулированные поднесущие колебания со средней частотой кГц. Модулирующим напряжением служит сигнал с частотой 30 Гц с постоянной фазой, соответствующей фазе сигнала, принимаемого в северном направлении от АРМ. Таким образом, сигнал АРМ в точке с азимутом имеет вид
, (9.22)
где – амплитуда сигнала; и – коэффициенты АМ азимутальным и опорным сигналами; – индекс частотной модуляции.
В бортовой аппаратуре ЛА (рис. 9.12,г) продетектированный сигнал АРМ (9.22) с приемника Прм разделяется фильтрами Ф30 и Ф10, настроенными соответственно на частоты и . Из опорного сигнала после частотного детектора ЧД выделяется сигнал постоянной фазы с частотой , который поступает на измеритель фазы ИФ, куда подается также азимутальный сигнал той же частоты.
Точность фазового канала азимута. Погрешность рассматриваемого канала зависит в основном от изменения фазы азимутального сигнала при его интерференции с сигналами, отраженными от окружающих АРМ объектов. Если предположить наличие только одного такого объекта с комплексным коэффициентом отражения , где , то, применяя формулу (9.22) к прямому и отраженному сигналам и выполняя соответствующие преобразования, можно найти погрешность определения азимута
, (9.23)
где – запаздывание отраженного сигнала относительно прямого, а – азимут отражающего объекта. Максимальное значение этой погрешности . Если, например, =0,1, то =5,63°, что не удовлетворяет существующим требованиям к средствам навигации.
Принцип действия фазового канала азимута с доплеровским АРМ. Радикальным методом повышения точности фазового канала азимута (ценой усложнения АРМ) является использование так называемых доплеровских радиомаяков. Антенная система такого АРМ (рис. 9.13,а) состоит из большого числа вибраторов (например, из 50), размещенных по окружности с радиусом , где – длина волны несущих колебаний. На противоположные вибраторы, например, и , подают от передатчика токи с частотами . Поочередное подключение пар вибраторов к источнику высокой частоты имитирует их вращение по окружности (и на рис. 9.13,б). Принимаемый сигнал из-за вызываемого вращением вибраторов и эффекта Доплера становится частотно-модулированным:
, (9.24)
а спектр его соответствует рис. 9.13, в.
Рис. 9.13. Антенная система доплеровского АРМ (а) и эквивалентная ей антенная система с вращающимися вибраторами и (б), а также изменения поднесущей частоты сигналов, принимаемых в точках 1 и 2 (в)
Индекс модуляции зависит от угловой скорости вращения вибратора и частоты питающего его тока. Опорный сигнал
(9.25)
при этом передается ненаправленной антенной – вибратором . Если в доплеровском АРМ та же, что и в обычном фазовом АРМ, то для обработки сигнала (9.24) пригодны приемные устройства, подобные показанному на рис. 9.12,г. Только теперь азимутальный и опорный сигналы меняются местами. Так как информация об азимуте заключена в фазе частотной модуляции, то влияние отраженных сигналов на точность канала азимута уменьшается и результирующая погрешность снижается в 10…15 раз.

 . На ДРМ принятый сигнал после обработки в приемнике Прм–О подается на формирователь сигнала ответа ФСО, где изменяется интервал между импульсами. Излучаемый ДРМ на частоте
. На ДРМ принятый сигнал после обработки в приемнике Прм–О подается на формирователь сигнала ответа ФСО, где изменяется интервал между импульсами. Излучаемый ДРМ на частоте  сигнал ответа дальности ОД принимается бортовой аппаратурой ЛА и поступает после приемника Прм–З на цифровой измеритель времени ИВ, который включается в момент излучения ЗД. Измеритель времени вырабатывает код, содержащий информацию о
сигнал ответа дальности ОД принимается бортовой аппаратурой ЛА и поступает после приемника Прм–З на цифровой измеритель времени ИВ, который включается в момент излучения ЗД. Измеритель времени вырабатывает код, содержащий информацию о  . Задержка сигнала в аппаратуре ДРМ (
. Задержка сигнала в аппаратуре ДРМ ( ) поддерживается постоянной и учитывается при измерении. Для повышения точности длительности импульсов сигналов ЗД и ОД выбирают в пределах 1…3 мкс.
) поддерживается постоянной и учитывается при измерении. Для повышения точности длительности импульсов сигналов ЗД и ОД выбирают в пределах 1…3 мкс.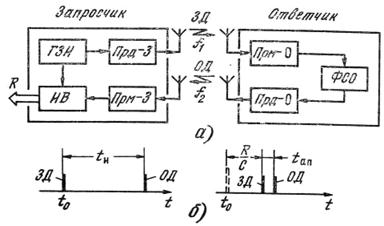
 после приема первого (пришедшего по кратчайшему пути) импульса запроса.
после приема первого (пришедшего по кратчайшему пути) импульса запроса. об/мин (600 град/с). В пределах этой ДНА излучаются непрерывные немодулированные колебания. Диаграмма ДН2 имеет в горизонтальной плоскости форму, близкую к окружности. С помощью ДН2 излучается опорный сигнал, представляющий собой две кодированные последовательности импульсов. Эти импульсы вырабатывает датчик, связанный с осью вращения антенны, создающей ДН1, и в соответствии с числом импульсов, приходящихся на один оборот ДН1, они называются опорными сигналами 35 («35») и 36 («36»). В момент, когда ось симметрии лепестков ДН1 совпадает с северным направлением меридиана, импульсы обеих последовательностей также совпадают, что служит сигналом начала отсчета времени (северный сигнал ОС) при определении азимута. Импульсы «36» следуют через каждые 10° оборота ДН1.
об/мин (600 град/с). В пределах этой ДНА излучаются непрерывные немодулированные колебания. Диаграмма ДН2 имеет в горизонтальной плоскости форму, близкую к окружности. С помощью ДН2 излучается опорный сигнал, представляющий собой две кодированные последовательности импульсов. Эти импульсы вырабатывает датчик, связанный с осью вращения антенны, создающей ДН1, и в соответствии с числом импульсов, приходящихся на один оборот ДН1, они называются опорными сигналами 35 («35») и 36 («36»). В момент, когда ось симметрии лепестков ДН1 совпадает с северным направлением меридиана, импульсы обеих последовательностей также совпадают, что служит сигналом начала отсчета времени (северный сигнал ОС) при определении азимута. Импульсы «36» следуют через каждые 10° оборота ДН1.
 , начало которого соответствует моменту прохождения минимума ДН1 через северное направление, а конец – средней точке азимутального сигнала, содержит информацию об азимуте
, начало которого соответствует моменту прохождения минимума ДН1 через северное направление, а конец – средней точке азимутального сигнала, содержит информацию об азимуте  точки приема
точки приема . (9.19)
. (9.19) компенсируется при определении азимута.
компенсируется при определении азимута. и через каждый интервал времени, соответствующий 10°, выдает импульс на счетчик Сч2. Азимутальный импульс АИ закрывает контрольное устройство КУ и разрешает перепись содержимого счетчиков через схемы переписи СП в запоминающие устройства ЗУ. С этих устройств снимается код азимута, так как при известном периоде
и через каждый интервал времени, соответствующий 10°, выдает импульс на счетчик Сч2. Азимутальный импульс АИ закрывает контрольное устройство КУ и разрешает перепись содержимого счетчиков через схемы переписи СП в запоминающие устройства ЗУ. С этих устройств снимается код азимута, так как при известном периоде  счетных импульсов их число
счетных импульсов их число  является мерой азимута
является мерой азимута  . Счетчик Сч1 выполняет функцию точного измерения азимута, а Сч2 – грубого.
. Счетчик Сч1 выполняет функцию точного измерения азимута, а Сч2 – грубого.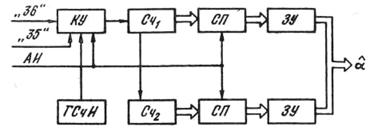
 , по времени совпадающее со срезом первого импульса азимутального сигнала АС (рис. 9.11,б). Такая ситуация возможна для объектов, азимут которых
, по времени совпадающее со срезом первого импульса азимутального сигнала АС (рис. 9.11,б). Такая ситуация возможна для объектов, азимут которых  лежит в пределах
лежит в пределах  , где
, где  – суммарная ширина двух лепестков ДН1.
– суммарная ширина двух лепестков ДН1.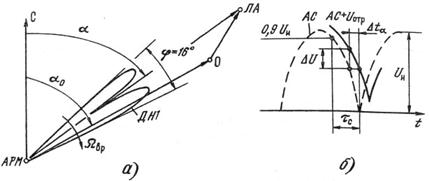
 , и длительности среза импульса АС, равной
, и длительности среза импульса АС, равной  , составляет
, составляет (9.20)
(9.20) – приращение напряжения АС в точке отсчета
– приращение напряжения АС в точке отсчета  – амплитуда АС.
– амплитуда АС. . Уменьшение
. Уменьшение  достигается сужением ДН1, при этом также уменьшается вероятность одновременного появления отражающего сигнала объекта и ЛА в пределах ДН1. С учетом всех дестабилизующих факторов точность импульсного азимутального канала соответствует
достигается сужением ДН1, при этом также уменьшается вероятность одновременного появления отражающего сигнала объекта и ЛА в пределах ДН1. С учетом всех дестабилизующих факторов точность импульсного азимутального канала соответствует  .
. =30 Гц (рис. 9.12,б). В точке с произвольным азимутом
=30 Гц (рис. 9.12,б). В точке с произвольным азимутом  запаздывает относительно фазы АМ сигнала, принимаемого в северном направлении (точка 1), на
запаздывает относительно фазы АМ сигнала, принимаемого в северном направлении (точка 1), на  , где
, где 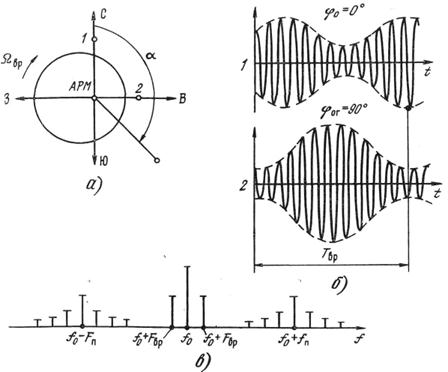
 . (9.21)
. (9.21) , т.е. погрешность определение азимута
, т.е. погрешность определение азимута  численно равна погрешности измерения фазы
численно равна погрешности измерения фазы  .
. кГц. Модулирующим напряжением служит сигнал с частотой 30 Гц с постоянной фазой, соответствующей фазе сигнала, принимаемого в северном направлении от АРМ. Таким образом, сигнал АРМ в точке с азимутом
кГц. Модулирующим напряжением служит сигнал с частотой 30 Гц с постоянной фазой, соответствующей фазе сигнала, принимаемого в северном направлении от АРМ. Таким образом, сигнал АРМ в точке с азимутом  , (9.22)
, (9.22) – амплитуда сигнала;
– амплитуда сигнала;  и
и  – коэффициенты АМ азимутальным и опорным сигналами;
– коэффициенты АМ азимутальным и опорным сигналами;  – индекс частотной модуляции.
– индекс частотной модуляции. . Из опорного сигнала после частотного детектора ЧД выделяется сигнал постоянной фазы с частотой
. Из опорного сигнала после частотного детектора ЧД выделяется сигнал постоянной фазы с частотой  , где
, где  , то, применяя формулу (9.22) к прямому и отраженному сигналам и выполняя соответствующие преобразования, можно найти погрешность определения азимута
, то, применяя формулу (9.22) к прямому и отраженному сигналам и выполняя соответствующие преобразования, можно найти погрешность определения азимута , (9.23)
, (9.23) – запаздывание отраженного сигнала относительно прямого, а
– запаздывание отраженного сигнала относительно прямого, а  . Если, например,
. Если, например,  =0,1, то
=0,1, то  =5,63°, что не удовлетворяет существующим требованиям к средствам навигации.
=5,63°, что не удовлетворяет существующим требованиям к средствам навигации. (например, из 50), размещенных по окружности с радиусом
(например, из 50), размещенных по окружности с радиусом  , где
, где  – длина волны несущих колебаний. На противоположные вибраторы, например,
– длина волны несущих колебаний. На противоположные вибраторы, например,  и
и  , подают от передатчика токи с частотами
, подают от передатчика токи с частотами  . Поочередное подключение пар вибраторов к источнику высокой частоты имитирует их вращение по окружности (
. Поочередное подключение пар вибраторов к источнику высокой частоты имитирует их вращение по окружности ( и
и  на рис. 9.13,б). Принимаемый сигнал из-за вызываемого вращением вибраторов
на рис. 9.13,б). Принимаемый сигнал из-за вызываемого вращением вибраторов  , (9.24)
, (9.24)
 (9.25)
(9.25) . Если
. Если