Задача (1.1) называется выпуклой, если X – выпуклое множество, f – выпуклая функция на X.
Теорема 1.8. Если задача (1.1) выпукла, то любое ее локальное решение является также глобальным.
Таким образом, для выпуклых задач понятия локального и глобального решений не различаются и можно говорить просто об их решении.
Второе свойство выпуклых задач можно высказать в виде следующего общего принципа: необходимые условия при соответствующих предположениях выпуклости оказываются и достаточными.
Теорема 1.9. Пусть функция f выпукла наRn и дифференцируема в точке х* Î Rn. Если f'(х*) = 0, то х* – точка минимума f на X, т. е. решение задачи (1.5).
Полученные свойства выпуклых задач имеют важное значение не только в теории, но и в численных методах оптимизации. Дело в том, что большинство существующих численных методов позволяет, вообще говоря, находить лишь локальные решения, а точнее, стационарные точки задачи. Теоремы 1.8, 1.9 говорят о том, что для выпуклой задачи отыскание стационарной точки автоматически означает отыскание решения, причем глобального.
Укажем еще одно полезное свойство выпуклых задач.
Теорема 1.10. Пусть задача (1.1) выпукла и имеет решение. Тогда множество ее решений выпукло (рис. 1.7, а). Если при этом f строго выпукла на X, то решение задачи единственно, т. е. X* состоит из одной точки (рис. 1.7, б).
Рис.1.7. Выпуклость множества решений выпуклой задачи оптимизации
Задача (1.1) называется задачей математического программирования, если ее допустимое множество имеет вид
,
т.е. задается системой конечного числа неравенств и уравнений, рассматриваемых, вообще говоря, на некотором множестве Р Ì Rn. Иными словами, задачу математического программирования можно записать в виде
f(x) ® min,
gi(x) £ 0, i = 1, …, k, (1.21)
gi(x)= 0, i = k+1, …, т, x Î P.
При этом условия типа gi(x) £ 0 называются ограничениями-неравенствами, типа gi(x)= 0 – ограничениями-равенствами, оба этих типа условий — функциональными ограничениями; условие x Î P носит название прямого ограничения.
Классическая задача на условный экстремум является частным случаем задачи математического программирования, когда ограничения-неравенства и прямое ограничение отсутствуют.
Деление ограничений задачи математического программирования на функциональные и прямые условно. Например, в задаче (1.21) можно исключить ограничения-равенства путем введения их в прямое ограничение, т.е. перейти к задаче вида
f(x) ® min,
gi(x) £ 0, i = 1, …, k, x Î P',
где . Исключение всех функциональных ограничений лишь возвращает нас к задаче вида (1.1). То или иное представление задачи определяется целями исследования. Однако, как правило, чем подробнее описаны функциональные ограничения задачи, тем детальнее удается изучить ее свойства. Обычно в качестве Р берется множество «простой» структуры, например координатный параллелепипед
,
причем здесь не исключается, что aj = -¥ или bj = +¥ (координаты могут уходить в бесконечность) при тех или иных j.
При геометрической интерпретации задач математического программирования используются те же приемы, о которых шла речь выше. В дополнение к этому следует лишь отметить, что при изображении области, определяемой ограничением-неравенством gi(x) £ 0,указывается линия уровня gi(x) = 0 и может ставиться знак «–» с той ее стороны, где gi(x) £ 0, и знак «+» - с противоположной.
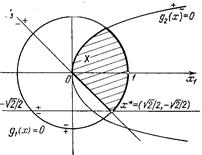
Пример 1.5. Пусть дана задача
f(x) = x2 ® min,
, , .
Ее геометрической интерпретацией служит рис.1.8. Отсюда видно, что решением задачи является «нижняя» точка пересечения окружности g1(x) = 0 и прямой g3(x) = 0, т.е. .
Укажем важный подкласс задач математического программирования. Задача (1.21) называется задачей выпуклого программирования, если множество Р выпукло, функции f, g1, ..., gk выпуклы на Р, функции gk+1, ..., gmлинейны (см. (1.19)).
Легко проверить, что задача из примера 1.5 является задачей выпуклого программирования. Приведем два содержательных примера задач этого типа.
Пример 1.6 (задача поиска). Объект, подлежащий обнаружению, находится в одном из п районов с вероятностями р1, ..., рпсоответственно. Для поиска объекта имеется общий ресурс времени Т. Известно, что при поиске в i-м районе в течение времени ti, вероятность обнаружения объекта (при условии, что он там находится) равна , где ai > 0 – заданное число. Требуется так распределить время наблюдения по районам, чтобы максимизировать вероятность обнаружения объекта. Соответствующая задача оптимизации имеет вид
,
,
ti ³ 0, i = 1, …, n.
Нетрудно проверить, что целевая функция задачи вогнута по t = (t1, …, tn). Переходя к минимизации этой функции, взятой с обратным знаком, получаем задачу выпуклого программирования.

 выпукло (рис. 1.7, а). Если при этом f строго выпукла на X, то решение задачи единственно, т. е. X* состоит из одной точки (рис. 1.7, б).
выпукло (рис. 1.7, а). Если при этом f строго выпукла на X, то решение задачи единственно, т. е. X* состоит из одной точки (рис. 1.7, б).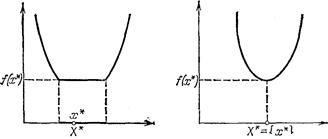
 ,
, . Исключение всех функциональных ограничений лишь возвращает нас к задаче вида (1.1). То или иное представление задачи определяется целями исследования. Однако, как правило, чем подробнее описаны функциональные ограничения задачи, тем детальнее удается изучить ее свойства. Обычно в качестве Р берется множество «простой» структуры, например координатный параллелепипед
. Исключение всех функциональных ограничений лишь возвращает нас к задаче вида (1.1). То или иное представление задачи определяется целями исследования. Однако, как правило, чем подробнее описаны функциональные ограничения задачи, тем детальнее удается изучить ее свойства. Обычно в качестве Р берется множество «простой» структуры, например координатный параллелепипед ,
, ,
,  ,
,  .
. .
.
 , где ai > 0 – заданное число. Требуется так распределить время наблюдения по районам, чтобы максимизировать вероятность обнаружения объекта. Соответствующая задача оптимизации имеет вид
, где ai > 0 – заданное число. Требуется так распределить время наблюдения по районам, чтобы максимизировать вероятность обнаружения объекта. Соответствующая задача оптимизации имеет вид ,
, ,
,