Задача (1.1) называется задачей безусловной оптимизации, если Х= Rn, т.е. если она имеет вид
f(x) ® min, хÎRn. (1.5)
При изучении любого типа задач оптимизации важное место занимает вопрос об условиях оптимальности, или, как еще говорят, условиях экстремума. Различают необходимые условия оптимальности, т. е. условия, которым должна удовлетворять точка, являющаяся решением задачи, и достаточные условия оптимальности, т. е. условия, из которых следует, что данная точка является решением задачи.
Напомним соответствующие результаты необходимых и достаточных условий оптимальности в задачах безусловной оптимизации и их простые доказательства из курса математического анализа.
Пусть
- вектор первых частных производных (градиент) функции f в точке х*ÎRn;
- матрица вторых частных производных (гессиан) функции f в точке х*ÎRn.
Нижеследующая теорема указывает необходимое условие локальной оптимальности первого порядка.
Теорема 1.2. Пусть функция f дифференцируема в точке х*ÎRn. Если х* — локальное решение задачи (1.5), то
f'(x*) = 0. (1.6)
Точка х*, удовлетворяющая условию (1.6), называется стационарной точкой функции f или задачи (1.5). Стационарная точка не обязана быть решением, т.е. (1.6) не является достаточным условием оптимальности. Для выявления «посторонних» стационарных точек может использоваться необходимое условие локальной оптимальности второго порядка.
Теорема 1.3. Пусть функция f дважды дифференцируема в точке х*ÎRn. Если х* - локальное решение задачи (1.5), то матрица f" (х*) неотрицательно определена, т. е.
при всех hÎRn. (1.7)
Достаточное условие локальной оптимальности содержит характерное усиление требований на матрицу f"(х*).
Теорема 1.4. Пусть функция f дважды дифференцируема в точке х*ÎRn. Предположим, что f'(х*) = 0, а матрица f"(х*) положительно определена, т.е.
при всех hÎRn, h ¹ 0. (1.8)
Тогда х* - строгое локальное решение задачи (1.5).
В тех случаях, когда функция f достаточно проста, теоремы 1.2-1.4 позволяют явным образом решить задачу (1.5). При этом для исследования матрицы f"(х*) на неотрицательную и положительную определенность, как правило, используется критерий Сильвестра.
Пример 1.1. Рассмотрим задачу
, х*ÎRn.
Условие (1.6) имеет здесь вид
, .
Решениями этой системы (стационарными точками) являются xl= (0,0) и x2 = (1,1). При этом
, , .
По критерию Сильвестра матрица f"(х1) не является неотрицательно определенной, а матрица f"(х2) положительно определена. Тогда, в силу теоремы 1.3, точка х1 не может быть решением задачи; в силу теоремы 1.4 точка х2- строгое локальное решение задачи.
Задача (1.1) называется задачей условной оптимизации (условной задачей), если X - собственное подмножество пространства Rn. Для такой задачи сохраняют силу утверждения теорем 1.2—1.4, если ее локальное решение x* является внутренней точкой допустимого множества Х (х* Î int X). Однако для многих условных задач минимум достигается именно на границе, в силу чего для них эти классические результаты анализа неприменимы. При переходе от безусловных к условным задачам все вопросы оптимизации становятся более сложными.
В дальнейшем мы часто будем прибегать к геометрической интерпретации задач оптимизации, основанной на понятии линий (или поверхностей) уровня функции f, т.е. множеств вида
, a Î R.
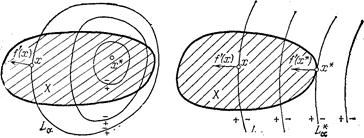
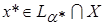
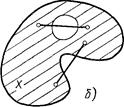
Для геометрической интерпретации данной (двумерной) задачи необходимо изобразить ее допустимое множество Х и несколько характерных линий уровня целевой функции f (рис.1.1).
а) б)
Чтобы отразить характер изменения функции, у данной линии уровня La полезно ставить знак «+» с той стороны, где f принимает значения, большие a, и знак «—» - с другой. В геометрическом плане поиск (глобального) решения сводится к нахождению минимального числа a* среди всех a таких, что линия уровня La, имеет непустое пересечение с Х. При этом любая точка является решением задачи, а само a* = f(х*) - минимальным значением функции f на X. Как отмечалось, возможны два случая: х* лежит внутри (рис.1.1, а) и на границе (рис.1.1, б) множества X.
Пример 1.2. Пусть в задаче (1.1) допустимое множество Х представляет собой круг единичного радиуса с центром в нуле, а целевая функция f имеет вид f (x)=(x1 - 2)2+(x2 - 1)2 (рис.1.2). Ее линия уровня La, при a > 0 является окружностью радиуса с центром в точке (2, 1), при a = 0 вырождается в эту точку, а при a < 0 пуста. Геометрически ясно, что здесь - это та из указанных окружностей, которая касается круга X. Отсюда без труда определяется, что решением данной задачи служит .
Рис 1.2
Классическая задача на условный экстремум. Это задача (1.1) (или (1.4)) с допустимым множествомX, заданным системой конечного числа уравнений:
.
Обычно эта задача записывается в виде
f(x)® min,
gi(x)= 0, i = 1,…,m, (1.9)
т.е. явно указывается не само допустимое множество, а система, его определяющая.
При исследовании задачи (1.9) важную роль играет ее функция Лагранжа, т. е. функция
,
где хÎRn, y0ÎR, y=(y1,…,ym) Î Rm. Частные производные этой функции по координатам вектора х имеют вид
. (1.10)
Составленный из них вектор обозначается через , т. е.
. (1.11)
Теорему о необходимых условиях локальной оптимальности в задаче (1.9), известная как правило множителей Лагранжа.
Теорема 1.5. Пусть функции f, g1, ..., gm непрерывно дифференцируемы в некоторой окрестности точки х*ÎRn. Если х* - локальное решение задачи (1.9), то существует число и вектор , не равные нулю одновременно и такие, что
. (1.12)
Если при этом градиенты линейно независимы (условие регулярности), то .
Условие (1.12) с учетом (1.11) означает, что градиенты линейно зависимы. В частности, если т =1, то и коллинеарны.
Фигурирующие в теореме 1.5 числа называются множителями Лагранжа. Любая точка х*, удовлетворяющая при некоторых и , , условию (1.12), а также условию допустимости
gi(x*)= 0, i = l, ..., m, (1.13)
называется стационарной точкой задачи (1.9).
Как и в случае безусловной задачи оптимизации, стационарные точки задачи (1.9) не обязаны быть ее решениями. Здесь также существуют необходимые и достаточные условия оптимальности с привлечением вторых производных. Обозначим через
матрицу вторых производных функции Лагранжа по координатам вектора х.
Теорема 1.6. Пусть функции f, g1, ..., gm дважды дифференцируемы в точке х*ÎRn и непрерывно дифференцируемы в ее некоторой окрестности, причем градиенты линейно независимы. Если х* - локальное решение задачи (1.9), то
при любых , у*, удовлетворяющих (1.12), и всех h ÎRn таких, что
, i = 1, …, m. (1.14)
Теорема 1.7. Пусть функции f, g1, ..., gm дважды дифференцируемы в точке х*ÎRn,удовлетворяющей (1.13). Предположим, что при некоторых и выполняется условие (1.12) и, кроме того,
при всех ненулевых h ÎRn, удовлетворяющих (1.14). Тогда х* - строгое локальное решение задачи (1.9).
В простейших случаях теоремы 1.5—1.7 позволяют решить задачу в явном виде.
Пример 1.3. Пусть требуется найти локальные решения задачи
,
где а > 0 и b > 0 - заданные числа. Ясно, что указанное в теореме 1.5 условие регулярности здесь выполнено. Выпишем (регулярную) функцию Лагранжа:
.
Поскольку , то система для определения стационарных точек имеет вид:
, .
Без труда проверяется, что эта система имеет три решения:
1) x1 = 0, x2 = 1, y = b/3;
2) x1 = 1, x2 = 0, y = a/3;
3) , , .
Далее, имеем
.
Для указанных решений эта матрица принимает соответственно вид
, , .
Условие (1.14) выглядит здесь следующим образом:
.
Для первых двух решений это означает, что h2= 0 и h1 = 0 соответственно. Отсюда ясно, что матрицы A1 и А2 удовлетворяют условию, указанному в теореме 1.7 (хотя, заметим, они не являются положительно определенными). Следовательно, точки (0, 1) и (1, 0) - строгие локальные решения исследуемой задачи. Для матрицы A3заведомо не выполняется условие, указанное в теореме 1.6. Поэтому точка не может быть решением данной задачи. Ясно, однако, что эта точка служит строгим локальным решением задачи максимизации той же функции при тех же ограничениях
Иногда задачу (1.9) удается решить, используя лишь теорему 1.5.
Множество Х ÌRn называется выпуклым, если при всех х1, х2 Î X, l Î [0, 1]. Иными словами, множество Х выпукло, если оно вместе с любыми своими двумя точками х1 и х2 содержит соединяющий их отрезок, т. е. множество вида
[x1, x2] = {x ÎRn | x = x2 + l(x1 - x2), 0 £ l £ 1}
(рис. 1.4).
Рис.1.4. а) Выпуклое множество; б) невыпуклое множество
На числовой прямой R выпуклыми множествами являются всевозможные промежутки, т.е. одноточечные множества, интервалы, полуинтервалы, отрезки, полупрямые и, наконец, сама. прямая. Примерами выпуклых множеств в пространстве Rn служат само пространство, любое его линейное подпространство, одноточечное множество, шар, отрезок, а также следующие множества:
– прямая, проходящая через точку х0 в направлении вектора h;
– луч, выходящий из точки х0 в направлении h;
(1.15)
– гиперплоскость с нормалью р;
, (1.16)
– порождаемые ею полупространства.
Все перечисленные множества, кроме шара, являются частными случаями выпуклого множества вида
X = {x Î Rn | Ax £ b} = { x Î Rn | á ai, xñ £ bi, i = 1,…, m}, (1.17)
где A – некоторая матрица размера т ´ п со строками a1, …, am, b = (b1, …, bm) ÎRm (т = 1, 2, ...). Множества вида (1.17) принято называть полиэдральными или просто полиэдрами. Таким образом, полиэдр — это множество решений некоторой системы конечного числа линейных неравенств, или, что то же самое, пересечение конечного числа полупространств.
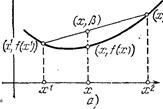
Функция f, определенная на выпуклом множестве , называется выпуклой на X, если
(1.18)
при всех х1, х2 Î Х, l Î [0, 1]. Если при всех х1, х2 Î Х, x1 ¹ x2, l Î [0, 1] неравенство (1.18) выполняется как строгое, то f называется строго выпуклой на X. Функция f называется (строго) вогнутой, если функция – f (строго) выпукла.
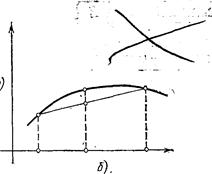
Геометрически выпуклость функции f означает, что любая точка произвольной хорды графика f располагается не ниже соответствующей точки самого графика (рис.1.6, а). Для вогнутой функции взаимное расположение хорды и графика обратно (рис.1.6, б). Функции f (х) = х2, f(x) = ex выпуклы наR;f(x) = ln x вогнута на множестве положительных чисел; f(x) = sin x вогнута на [0, p] и выпукла на[p, 2p]. Отметим, что указанные функции, в самом деле, строго выпуклы или вогнуты. Функция f(x)= ||x|| выпукла, f(x) = ||x||2 строго выпукла на Rn. Функцию вида
f(x)= áa, xñ + b, (1.19)
где a Î Rn, bÎ R, будем называть линейной. Ясно, что для линейной функции неравенство (1.18) выполняется как равенство. Поэтому она одновременно выпукла и вогнута на Rn, но не строго.
Рис. 1.6. а) Выпуклая функция; б) вогнутая функция

 при всех hÎRn. (1.7)
при всех hÎRn. (1.7) при всех hÎRn, h ¹ 0. (1.8)
при всех hÎRn, h ¹ 0. (1.8) , х*ÎRn.
, х*ÎRn. ,
,  .
. ,
,  ,
,  .
. , a Î R.
, a Î R.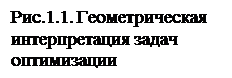
 является решением задачи, а само a* = f(х*) - минимальным значением функции f на X. Как отмечалось, возможны два случая: х* лежит внутри (рис.1.1, а) и на границе (рис.1.1, б) множества X.
является решением задачи, а само a* = f(х*) - минимальным значением функции f на X. Как отмечалось, возможны два случая: х* лежит внутри (рис.1.1, а) и на границе (рис.1.1, б) множества X. с центром в точке (2, 1), при a = 0 вырождается в эту точку, а при a < 0 пуста. Геометрически ясно, что здесь
с центром в точке (2, 1), при a = 0 вырождается в эту точку, а при a < 0 пуста. Геометрически ясно, что здесь  - это та из указанных окружностей, которая касается круга X. Отсюда без труда определяется, что решением данной задачи служит
- это та из указанных окружностей, которая касается круга X. Отсюда без труда определяется, что решением данной задачи служит 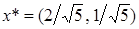 .
. Рис 1.2
Рис 1.2 .
. ,
, . (1.10)
. (1.10) , т. е.
, т. е. . (1.11)
. (1.11) и вектор , не равные нулю одновременно и такие, что
и вектор , не равные нулю одновременно и такие, что . (1.12)
. (1.12) линейно независимы (условие регулярности), то
линейно независимы (условие регулярности), то  .
. линейно зависимы. В частности, если т =1, то
линейно зависимы. В частности, если т =1, то  и
и  коллинеарны.
коллинеарны. называются множителями Лагранжа. Любая точка х*, удовлетворяющая при некоторых
называются множителями Лагранжа. Любая точка х*, удовлетворяющая при некоторых  ,
,  , условию (1.12), а также условию допустимости
, условию (1.12), а также условию допустимости
 , i = 1, …, m. (1.14)
, i = 1, …, m. (1.14)
 ,
, .
. , то система для определения стационарных точек имеет вид:
, то система для определения стационарных точек имеет вид: ,
,  .
. ,
,  ,
,  .
. .
. ,
,  ,
,  .
. .
. не может быть решением данной задачи. Ясно, однако, что эта точка служит строгим локальным решением задачи максимизации той же функции при тех же ограничениях
не может быть решением данной задачи. Ясно, однако, что эта точка служит строгим локальным решением задачи максимизации той же функции при тех же ограничениях при всех х1, х2 Î X, l Î [0, 1]. Иными словами, множество Х выпукло, если оно вместе с любыми своими двумя точками х1 и х2 содержит соединяющий их отрезок, т. е. множество вида
при всех х1, х2 Î X, l Î [0, 1]. Иными словами, множество Х выпукло, если оно вместе с любыми своими двумя точками х1 и х2 содержит соединяющий их отрезок, т. е. множество вида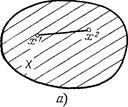


 (1.15)
(1.15) ,
,  (1.16)
(1.16) , называется выпуклой на X, если
, называется выпуклой на X, если (1.18)
(1.18)