|

|
ПаскальСиАссемблерJavaMatlabPhpHtmlJavaScriptCSSC#DelphiТурбо Пролог1С Компьютерные сетиСистемное программное обеспечениеИнформационные технологииПрограммирование Linux Unix Алгоритмические языки Аналоговые и гибридные вычислительные устройства Архитектура микроконтроллеров Введение в разработку распределенных информационных систем Введение в численные методы Дискретная математика Информационное обслуживание пользователей Информация и моделирование в управлении производством Компьютерная графика Математическое и компьютерное моделирование Моделирование Нейрокомпьютеры Проектирование программ диагностики компьютерных систем и сетей Проектирование системных программ Системы счисления Теория статистики Теория оптимизации Уроки AutoCAD 3D Уроки базы данных Access Уроки Orcad Цифровые автоматы Шпаргалки по компьютеру Шпаргалки по программированию Экспертные системы Элементы теории информации |
Пятизначное моделирование для анализа цифровых элементов в системе автоматизированного проектирования OrCADПрименение пятизначного моделирования для анализа цифровых элементов в системе автоматизированного проектирования OrCAD с наличием статических и динамических рисков сбоя. Асинхронное моделирование Асинхронный метод моделирования применяется для анализа переходных процессов в логических схемах. В этом методе учитывается время распространения сигналов в элементах и соединительных цепях схемы.
Рис. 1, а
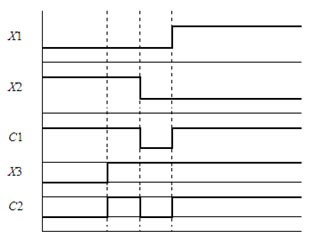
Рис. 1, б. Временная диаграмма работы элемента ИЛИ при статическом риске сбоя Динамический риск сбоя предполагает возможность многократного изменения сигнала на выходе при переходе от входного набора A к набору B, когда выходной сигнал меняется на противоположный (рис. .2.). Как видно из рисунка, при переходе от набора A=X1X2X3={010} к набору B= X1X2X3={101} возникает динамический риск сбоя. Динамический риск сбоя является следствием статического риска сбоя.
Рис. 2. Временная диаграмма работы элемента при динамическом риске сбоя
В логических схемах с памятью, т.е. в схемах с обратными связями, под воздействием входных сигналов могут изменить состояние сразу несколько элементов памяти. Окончательное состояние схемы очень часто зависит от очередности переключения элементов памяти. В этих случаях говорят, что в схеме существуют состязания сигналов обратных связей, или просто - состязания сигналов. Если под воздействием входного сигнала схема из одного состояния может перейти в различные состояния в зависимости от задержек в элементах схемы, то в этом случае состязания называют критическими. По сравнению с синхронным, асинхронное моделирование требует выполнения существенно большего количества вычислений. Объем программ также возрастает из-за необходимости моделирования элементов задержек. Значительно быстрее риски сбоев и критические состязания могут быть выявлены моделированием логических схем с использованием многозначного представления сигналов. Более детально сведения о работе схемы могут быть получены при использовании пятизначного моделирования. Справочная информация по элементам
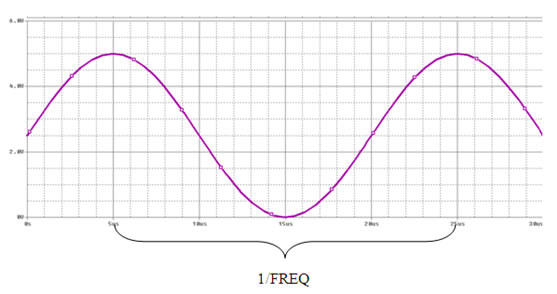
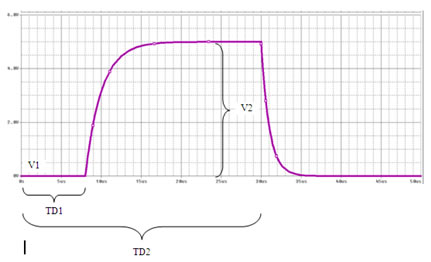
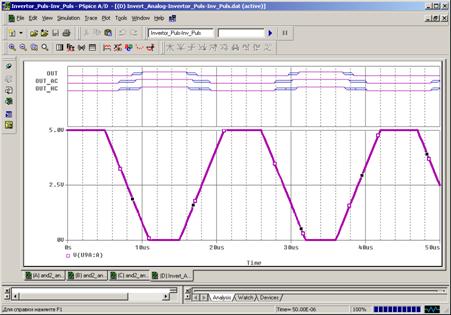
Пример выполнения работы 2. Подключение импульсного источника сигнала.
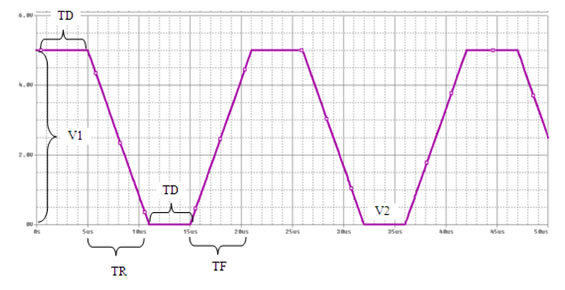
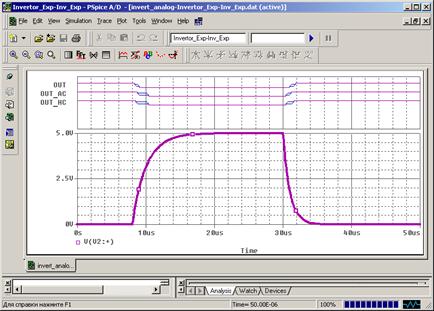
3. Подключение экспоненциального источника сигнала.
Моделирование статических рисков сбоя на примере элемента "И"
Моделирование статических рисков сбоя на примере элемента "ИЛИ"
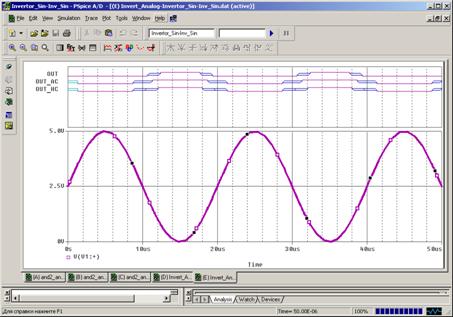
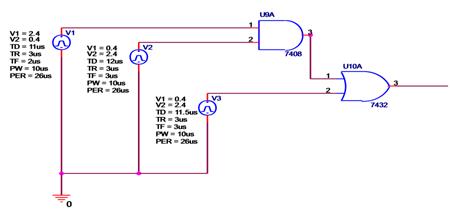
Моделирование динамических рисков сбоя на примере комбинации элементов "И" и "ИЛИ" в соответствии с рис. 1 и рис. 2 данной методички. Пример построения схемы
Получение динамического и статического сбоя на временных диаграммах системы ORCAD для приведенной схемы:
Вернуться в оглавление:Уроки OrCad |
Уроки php mysql Программирование Онлайн система счисления Калькулятор онлайн обычный Инженерный калькулятор онлайн Замена русских букв на английские для вебмастеров Замена русских букв на английские
Аппаратное и программное обеспечение
Графика и компьютерная сфера
Интегрированная геоинформационная система
Интернет
Компьютер
Комплектующие компьютера
Лекции
Методы и средства измерений неэлектрических величин
Обслуживание компьютерных и периферийных устройств
Операционные системы
Параллельное программирование
Проектирование электронных средств
Периферийные устройства
Полезные ресурсы для программистов
Программы для программистов
Статьи для программистов
Cтруктура и организация данных
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||

|
Не нашли то, что искали? Google вам в помощь! |
© life-prog.ru При использовании материалов прямая ссылка на сайт обязательна. |
|