|

|
ПаскальСиАссемблерJavaMatlabPhpHtmlJavaScriptCSSC#DelphiТурбо Пролог1С Компьютерные сетиСистемное программное обеспечениеИнформационные технологииПрограммирование Linux Unix Алгоритмические языки Аналоговые и гибридные вычислительные устройства Архитектура микроконтроллеров Введение в разработку распределенных информационных систем Введение в численные методы Дискретная математика Информационное обслуживание пользователей Информация и моделирование в управлении производством Компьютерная графика Математическое и компьютерное моделирование Моделирование Нейрокомпьютеры Проектирование программ диагностики компьютерных систем и сетей Проектирование системных программ Системы счисления Теория статистики Теория оптимизации Уроки AutoCAD 3D Уроки базы данных Access Уроки Orcad Цифровые автоматы Шпаргалки по компьютеру Шпаргалки по программированию Экспертные системы Элементы теории информации |
Синхронный RS триггер | Асинхронный RS триггер | Схема RS триггера
Важным методом, используемым для
описания функционирования RS- триггера,
является метод таблиц состояний (таблиц
переходов). Таблица состояний (рис. 3.3.а)
RS-триггера в сокращенной форме (эту
таблицу называют также управляющей
таблицей, таблицей функционирования)
содержит два входных сигнала (сигналы
R и S) и один выходной сигнал Q (функция).
Хотя триггеры имеют два выхода - один
прямой Q, а другой - инверсный `Q,
в описании триггера и в таблице
состояний указывают лишь состояние
прямого выхода Q.
Из
таблицы состояний триггера видно, что
при подаче на вход R уровня лог. «1»
триггер принимает состояние
логического «0», а при подаче
управляющего сигнала «1» на вход S -
состояние «1». Следует отметить также,
что если до подачи управляющего
сигнала, например, на вход R, триггер
находился в состоянии логического «0»,
его состояние не изменится и после
подачи сигнала «1» на вход R. Если на
обоих входах триггера имеются уровни
логического «0»- это состояние
соответствует режиму хранения и
триггер сохраняет предыдущее
состояние. В таблице это состояние
обозначено условно Q0. При подаче
на входы R и S одновременно уровня «1»
триггер будет находиться в
неопределенном (или неправильном)
состоянии, поэтому такое сочетание
сигналов R и S называется запрещенной
комбинацией управляющих сигналов и в
таблице состояний обозначается
буквой a. Сокращенная
таблица состояний триггера отражает
лишь динамику изменения состояния
триггера и не учитывает свойство
триггера запоминать единицу
информации. Полная таблица состояний
триггера должна учитывать влияние (на
процесс управления) значения
предыдущего состояния
триггера Q0.
Причем Q0
представляется как входная
переменная. Полная таблица состояний
RS -триггера приведена на рис. 3.3, б. Таблицу
состояний строят так же, как и таблицу
истинности. Анализ таблицы показывает, что только в ситуациях, описываемых строками 4 и 5, происходит изменение состояния триггера.
Рис.
3.3. RS - триггер: а) - упрощенная таблица
состояний; б) полная таблица
переходов;
в) Карта Карно; г) RS - триггер,
управляемый сигналом низкого уровня
(
Рассмотрим строку 4. После того, как подается сигнал на вход R, триггер сбрасывается, т.е. переходит из состояния “1” в состояние “0”. Рассмотрим
строку 5. Триггер устанавливается, т.е.
переходит из состояния “0” в
состояние “1”, в результате подачи
сигнала “1” на вход S.
Для строк 1 и 2 сигналы S =01* и R=0,
и, следовательно, никаких изменений в
состоянии триггера не происходит. Для
строки 3 сигнал R=1, и этот сигнал в
нормальных условиях должен сбросить
триггер, но так как триггер уже “сброшен”
и Q = 0, то сигнал R = 1 не изменяет его
состояние. Аналогично
для строки 6 сигнал S = 1, и этот сигнал в
обычных условиях будет устанавливать
триггер в “1”, но Q = 1, и, следовательно,
состояние триггера останется без
изменений до поступления следующего
сигнала R.
Особенность
RS-триггера заключается в том, что при
подаче одновременно на входы R и S
сигнала, соответствующего логической
1, состояние триггера становится
неопределенным: на обоих выходах Q и `Q
установится уровень “1”, а после
снятия со входов управляющих сигналов,
в силу случайных причин, триггер может
установиться в состояние “0” либо
“1”. Очевидно, что для нормальной работы триггера
необходимо исключить указанное
сочетание входных сигналов,
приводящее к неопределенному
состоянию, что можно осуществить,
предусмотрев выполнения запрещающего
условия R ×
S=0. Из
таблицы состояний может быть получено
уравнение, описывающее поведение
триггера. Это уравнение носит
название характеристического уравнения
триггера. Оно показывает, как меняется
состояние триггера в зависимости от
текущих значений состояния и входов. Для
получения упрощенного аналитического
выражения, описывающего поведение RS-триггера,
построим карту Карно и проведем
соответствующие контуры (рис. 3.3, в).
Полученное характеристическое
уравнение триггера имеет вид
Применив
закон де Моргана преобразуем
полученные выражение в базис И-НЕ:
Схема RS- триггера, реализованного в выбранном базисе, приведена на рис. 3.3, г.
Из
формулы RS - триггера видно, что при
реализации его в базисе И-НЕ, триггер
управляется сигналами низкого уровня,
т.е. уровня лог. "0" (если не
предусмотрены инверторы). Для
приведения поведения триггера,
выполненного на элементах И-HE, в
соответствие с таблицей состояний
сигналы S и R необходимо инвертировать.
Из
анализа схемы рис. 3.3, г очевидно, что
простой RS триггер можно
сконструировать, соединив “крест-накрест”
два элемента И-НЕ. Входные
линии триггера обозначены как
Схема
RS-триггера, реализовнная в базисе И-HЕ
в соответствии с таблицей состояний,
приведена на рис. 3.3, д.
Схема RS -триггера, выполненная на
элементах базиса ИЛИ-HЕ, приведена на
рис. 3.4, а. Временные диаграммы,
поясняющие работу RS-триггера,
приведены на рис. 3.4, б. Из
временных диаграмм (рис. 3.4, б) следует,
что рассмотренные выше RS-триггеры
опрокидываются, т.е. управляются
сигналами R и S, в любой момент
времени. В тех случаях, когда
длительности управляющих сигналов не
синхронизированы (не согласованы),
триггер может находиться в
неопределенном состоянии (интервалы
времени t4, t5), и поэтому
такие триггеры называют асинхронными.
Триггер,
построенный на базе элементов ИЛИ-НЕ,
называют также дизьюнктивной
бистабильной ячейкой. Бистабильные
ячейки, помимо самостоятельного
применения, входят в качестве
составного узла в триггеры других
типов.
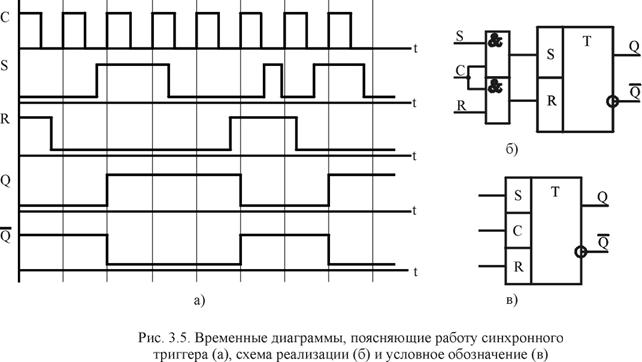
Синхронный
RS -триггер. Синхронные
триггеры снабжаются дополнительным
входом, по которому поступает
синхронизирующий (тактирующий) сигнал.
При этом изменение состояния триггера
происходит (при наличии управляющего
сигнала) только в те моменты времени,
когда на специальный синхровход
триггера поступает тактирующий
импульс (рис 3.5, а). Синхронный RS-триггер
строится в соответствии с рис. 3.5, б, а
его условное изображение на
принципиальных и функциональных
схемах приведено на рис. 3.5, в.
Синхронизирующий вход обозначается
буквой С.
Входные
сигналы S и R являются информационными,
а на входе С -
синхронизирующими, по ним происходит
переключение триггера. Следует
отметить, что для надежной работы
триггера необходимо, чтобы
длительность переключающего сигнала (синхронизирующего
сигнала) на входе С
была не меньше времени переключения
триггера. Временем переключения (срабатывания,
установки) триггера называется время,
которое проходит от момента изменения
входных сигналов до соответствующего
изменения состояния выходов и
определяющееся задержками
распространения сигнала логическими
элементами, входящими в состав
триггера.
Двухступенчатый
RS - триггер. Рассмотренные
схемы RS-триггеров являются
одноступенчатыми. Применение
одноступенчатых RS-триггеров в
качестве самостоятельных
запоминающих элементов ограничено.
Это связано с неустойчивой работой
последовательностной схемы (цифрового
автомата), память которой выполнена на
одноступенчатых RS-триггерах. Сигналы
переключения триггера S(t), R(t)
формируются в цифровом автомате
комбинационной схемой, в их
формировании участвуют, наряду с
внешними логическими сигналами,
сигналы Q(t) и
Двухступенчатый
триггер состоит из двух секций (ступеней),
соединенных каскадно, как показано на
рис. 3.6 а, причем, каждая секция
содержит по синхронному RS-триггеру.
Первая секция, ведущая или М-секция (М
происходит от английского MASTER)
принимает информацию со входных линий
S и R. Состояние выходов ведущей секции
подается на вторую секцию, ведомую,
или S-секцию (S происходит от
английского SLAVE). Для
ведущего триггера используется
обычная синхронизация, в то время как
для ведомого триггера импульс
синхронизации инвертируется.
Изменение состояния выхода ведущего
триггера будет происходить в момент
появления положительного импульса
синхронизации, и эти изменения будут
переданы на входы ведомого триггера.
Однако, никакие изменения на выходе
ведомого триггера не будут
происходить до тех пор, пока не
появится положительный сигнал
инвертированного импульса
синхронизации, т.е. отрицательный (задний
фронт) фронт исходного синхроимпульса.
Следовательно, изменения на выходах Q
и
На функциональных схемах двухступенчатый триггер изображается в соответствии с рис. 3.6, в. Символ ТТ в поле условного обозначения означает , что триггер двухступенчатый.
Триггеры
с динамическим управлением.
Динамические триггеры могут
опрокидываться как передним, так и
задним фронтом тактирующих импульсов.
Фрагменты схемного обозначения
приведены на рис. 3.7.
Вернуться в оглавление:Цифровые автоматы |
Уроки php mysql Программирование Онлайн система счисления Калькулятор онлайн обычный Инженерный калькулятор онлайн Замена русских букв на английские для вебмастеров Замена русских букв на английские
Аппаратное и программное обеспечение
Графика и компьютерная сфера
Интегрированная геоинформационная система
Интернет
Компьютер
Комплектующие компьютера
Лекции
Методы и средства измерений неэлектрических величин
Обслуживание компьютерных и периферийных устройств
Операционные системы
Параллельное программирование
Проектирование электронных средств
Периферийные устройства
Полезные ресурсы для программистов
Программы для программистов
Статьи для программистов
Cтруктура и организация данных
|

|
Не нашли то, что искали? Google вам в помощь! |
© life-prog.ru При использовании материалов прямая ссылка на сайт обязательна. |
|