1. Передатна функція цифрового регулятора отримана за його аналоговою моделлю з використанням підстановки Тастіна (  )
)
2. Вирази для обчислення коефіцієнтів регулятора отримані із міркувань: корені характеристичного рівняння повинні бути дійсними, щоб перехідний процес був монотонний.
Прийнявши час регулювання рівним 2 хв, визначимо
λ = (3..4)/( 120)=0,29;
Підставивши задані значення, отримаємо
KP=0,109; TI=31,95;
Відповідно до структурної схеми передатна функцію регулятора має вигляд
 (6)
(6)
де
 (7)
(7)
Різницеверівняння регулятора
Для реалізації програми управління, необхідно від передатної функції регулятора перейти до різницевого рівняння.
На вхід регулятора надходить значення неузгодженості x(z) (помилка регулювання), а на виході буде керуючий вплив u(z). Тобто, передатна функція регулятора
 (8)
(8)
Звідки отримаємо:
 (9)
(9)
Помножимо ліву й праву частини рівняння на z-1
 (17)
(17)
Використовуючи властивості Z-перетворення: f(z) → f[n], f(z) z-∙1→f[n-1], отримаємо оригінал різницевого рівняння:
 (10)
(10)
Помилка регулювання: x[n]= g[n] - y[n]
Вихід регулятора для даного інтервалу згідно
 (11)
(11)
Алгоритм регулювання температури буде мати вигляд
 Рис. 3 Алгоритм регулювання температури
Рис. 3 Алгоритм регулювання температури
Моделювання системи.
1. На підставі вихідних і розрахованих значень складаємо модель об'єкта (рис. 4). При параметрах регулятора, отриманих розрахунковим шляхом перехідний процес при стрибкоподібному керуючому впливі показаний на рис 5.
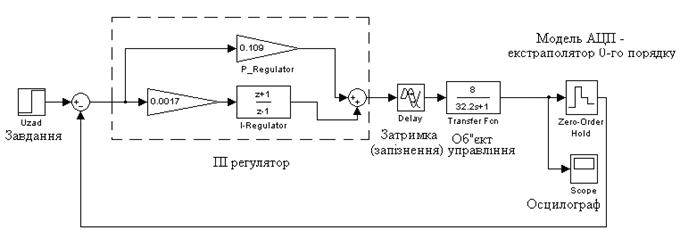
Рис. 4 Модель системи
Результат моделювання – на рис. 5
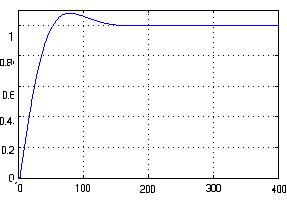
Рис. 5 Результат моделювання
2. Виконайте розрахунок параметрів регулятора при різних значеннях періоду дискретизації (збільшуючи задане значення в 2; 4 та 10 раз) та повторіть моделювання системи (Не забудьте зауваження до п. 2.3). Порівняйте отримані значення та дайте їм пояснення.
3. Обґрунтуйте для заданої системи значення періоду дискретизації.

