Вузли і пристрої, які містять елементи пам’яті, належать до класу автоматів з пам’яттю (АП). Наявність елементів пам’яті (ЕП) надає АП властивість мати деякий внутрішній стан Q, яке визначається сукупністю станів усіх елементів пам’яті. У залежності від внутрішнього стану (далі – просто стан), АП по-різному реагує на один і той же вектор вхідних сигналів Х. Сприймаючи вхідні сигнали при певному стані, АП переходить у новий стан і виробляє вектор вихідних змінних Y.
Переходи АП з одного стану в інший починаються з деякого початкового стану Q0, завдання якого також є частиною завдання автомата. Наступний стан залежить від Q0 та вхідних сигналів Х, що надійшли. Кінець кінцем, поточний стан і виходи автомата залежать від початкового стану і всіх векторів Х, які надходять на автомат у попередніх змінах вхідних сигналів. Таким чином, вся послідовність вхідних сигналів визначає послідовність станів та вихідних сигналів. Це пояснює назву «послідовнісні схеми», яка також застосовується для позначення АП.
Структурно АП відрізняються від КЦ наявністю в їхніх схемах зворотних зв’язків, в наслідок чого у них проявляються властивості запам’ятовування станів (корисно згадати схеми тригерних елементів, де вказана особливість проявляється доволі наочно). Автомати з пам’яттю у канонічному представленні розподіляють на дві частини: пам'ять і комбінаційний ланцюг. На входи КЦ подаються вхідні сигнали і сигнали стану АП. На її виході виробляються вихідні сигнали та сигнали переводу АП у новий стан.
Принциповим є ділення АП на асинхронні та синхронні. У асинхронних (рис. 3.21 д) роль елементів пам’яті відіграють елементи затримки, через які сигнали стану передаються на входи КЦ, щоб сумісно з новим набором вхідних змінних визначити наступну пару значень Y i Q на вході. Елементи АП перемикаються тут під безпосереднім впливом змін інформаційних сигналів. Швидкість розповсюдження процесу перемикань у ланцюгах асинхронного автомату визначається власними затримками елементів.
У асинхронному АП (рис. 3.1 б) є спеціальні синхросигнали (тактуючі імпульси) С, які дозволяють елементам пам’яті приймання даних тільки у певні моменти часу. Елементами пам’яті служать синхронні тригери. Процес обробки інформації упорядковується у часі, і протягом одного такту можливе розповсюдження процесу перемикання тільки у строго певних межах тракту обробки інформації.
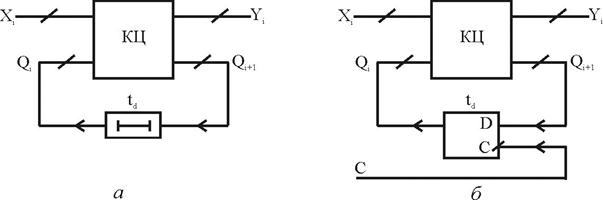
Рис.3.1. Асинхронний (а) та синхронний (б) автомати з пам’яттю
Практичне застосування асинхронних автоматів істотно утруднено сильним впливом на їх роботу затримок сигналів у ланцюгах АП, утворюючих статичні та динамічні ризики, гонки елементів пам’яті 9див. Частина 1) та ін. У результаті характерною властивістю асинхронного автомата є те, що при переході з одного стійкого стану у інший він зазвичай проходить через проміжні нестабільні стани. Неможна сказати, що методи боротьби з небажаними наслідками ризиків та гонок у асинхронних АП відсутні, та все ж забезпечення передбачуваної поведінки АП – складна проблема. В більш або менш складних АП асинхронні схеми зустрічаються доволі рідко, а у найпростіших схемах застосовуються. Прикладом можуть бути асинхронні RS-тригери.
У синхронних автоматах кожен стан стійкий і перехідні часові стани не виникають. Концепція боротьби з наслідками ризиків та гонок у синхронних автоматах проста – прийом інформації в елементи пам’яті дозволяється тільки після завершення у схемі перехідних процесів. Це забезпечується параметрами синхроімпульсів, що задають інтервали часу для завершення тих чи інших процесів. У порівнянні з асинхронними, синхронні АП значно простіші у проектуванні.
На сьогодення і досить тривалу перспективу основним шляхом побудови АП слід вважати застосування тактування, тобто синхронних автоматів.
У працях вітчизняних та зарубіжних учених розробляється напрямок, що має назву проектування пристроїв, що самосинхронизуються, у яких тактові імпульси проходять із змінною частотою, яка залежить від тривалості реального перехідного процесу у схемі. Однак перспективність цього напрямку ще не до кінця ясна. У теорії автоматів проводиться їх класифікація за рядом ознак. не вдуваючись до подробиць, відмітимо, що у схемотехніці переважають автомати Мура, виходи яких є функціями тільки стану автомату. Для цього автомату  та
та  . Залежність виходів і від стану автомата, і від вектора вхідних змінних властива автоматам Мілі.
. Залежність виходів і від стану автомата, і від вектора вхідних змінних властива автоматам Мілі.
Деякі функціональні вузли належать до числа автономних автоматів, котрі не мають інформаційних входів, і під впливом тактових сигналів переходять із стану у стан по алгоритму, який визначається структурою автомата.

