Анализируя графики на рисунках 5 и 6 можно заметить, что напряжение на нагрузке ниже заданного уровня и составляет 4В. Ошибка значительно превышает 5% от номинального значения.
По графику видно, что время длительности переходного процесса составляет 7 мс.
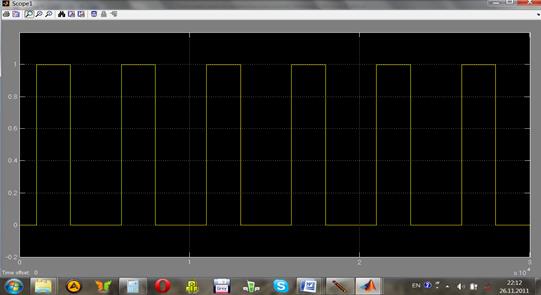
Рис.7 ШИМ сигнал управления
Анализируя график ШИМ-сигнала можно расчитать задаваемую величину гаммы. Она составляет .
Рассмотрим замкнутую модель с И-регулятором.
Рис.8 Модель понижающего преобразователя напряжения для системы с обратной связью



 .
.