Фазовые переменные этой подсистемы — моменты сил М и угловые скорости ω — соответственно, аналоги токов и напряжений. Запишем уравнения трех типов простейших элементов.
Уравнение вязкого трения вращения М = ω/Rвр, где Rвр – 1/k — аналог электрического сопротивления; k — коэффициент трения вращения.
Основное уравнение динамики вращательного движения М = J(dω/dt), где J — аналог электрической емкости (момент инерции элемента).
Уравнение кручения бруса с круглым поперечным сечением М = GJpθ, где М — крутящий момент; G — модуль сдвига; Jp — полярный момент инерции сечения; θ = d /dl — относительный угол закручивания.
Рассмотрим брус конечной длины, тогда θ = /l, где — угол закручивания; l — длина бруса. Продифференцируем обе части уравнения по времени, т. е. dM/dt – (GJр/l)(d /dt), или если учесть, что (d /dt) = ω и Lвр = l/(GJp), то ω = Lвр (dM/dt), где Lвр — аналог электрической индуктивности (вращательная гибкость).
Аналогичное компонентное уравнение можно получить для спиральной пружины, М = с , где с — жесткость пружины. Продифференцировав обе части уравнения по времени, получим ω = Lвp(dM/dt); Lвp = l/c.
13. Лекция: Математические модели (ММ) на различных иерархических уровнях
13.1. Иерархия математических моделей в САПР
Блочно-иерархический подход к проектированию радиоэлектронных средств (РЭС) включает в качестве своей основы иерархию математических моделей. Деление моделей по иерархическим уровням (уровням абстрагирования) происходит по степени детализации описываемых свойств и процессов, протекающих в объекте. При этом на каждом иерархическом уровне используют свои понятия "система" и "элементы". Так, система k-го уровня рассматривается как элемент на соседнем более высоком (k–1)-м уровне абстрагирования.
Рис. 13.1. Представление структуры объекта
Представим структуру некоторого объекта в виде множества элементов (рис. 13.1) и связей между ними [51].
Выделим в соответствии с блочно-иерархическим подходом в структуре объекта некоторые подмножества элементов и назовем их блоками (на рисунке показаны штриховыми линиями). Пусть состояние каждой связи характеризуется одной фазовой переменной vi, zj или uk. Здесь vi относится к внутренним связям между элементами данного блока, zj и uk относятся к выходам и входам блока соответственно.
Рассмотрим важные для функциональных моделей понятия полной модели и макромодели.
Полная модель блока есть модель, составленная из моделей элементов с учетом межэлементных связей, т. е. модель, описывающая как состояние выходов, так и состояние каждого из элементов блока. Моделями элементов блока А являются уравнения, связывающие входные и выходные переменные:
(13.1)
Полная модель блока есть система уравнений
(13.2)
где V, Z и U — векторы внутренних, выходных и входных фазовых переменных блока.
При большом количестве элементов размерность вектора V и порядок системы уравнений (13.2) становятся чрезмерно большими и требуют упрощения.
При переходе к более высокому иерархическому уровню упрощения они основаны на исключении из модели вектора внутренних переменных V. Полученная модель представляет собой систему уравнений
(13.3)
существенно меньшей размерности, чем полная модель (13.2), и называется макромоделью. Следовательно, макромодель уже не описывает процессы внутри блока, а характеризует только процессы взаимодействия данного блока с другими в составе системы блоков.
Модели (13.2) и (13.3) относятся друг к другу как полная модель и макромодель на п-м уровне иерархии. На более высоком (п–1)-м уровне блок А рассматривается как элемент, и макромодель (13.3) становится моделью элемента А. Следовательно, модели (13.1) и (13.3) относятся друг к другу как модели элементов соседних иерархических уровней. Из моделей типа (13.3) может быть составлена полная модель системы на (п–1)-м уровне.

 /dl — относительный угол закручивания.
/dl — относительный угол закручивания.
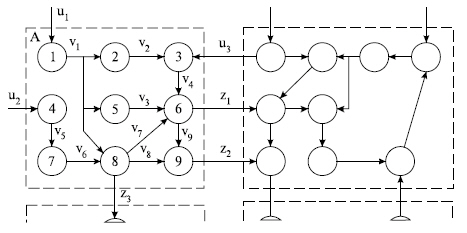 Рис. 13.1. Представление структуры объекта
Представим структуру некоторого объекта в виде множества элементов (рис. 13.1) и связей между ними [51].
Выделим в соответствии с блочно-иерархическим подходом в структуре объекта некоторые подмножества элементов и назовем их блоками (на рисунке показаны штриховыми линиями). Пусть состояние каждой связи характеризуется одной фазовой переменной vi, zj или uk. Здесь vi относится к внутренним связям между элементами данного блока, zj и uk относятся к выходам и входам блока соответственно.
Рассмотрим важные для функциональных моделей понятия полной модели и макромодели.
Полная модель блока есть модель, составленная из моделей элементов с учетом межэлементных связей, т. е. модель, описывающая как состояние выходов, так и состояние каждого из элементов блока. Моделями элементов блока А являются уравнения, связывающие входные и выходные переменные:
Рис. 13.1. Представление структуры объекта
Представим структуру некоторого объекта в виде множества элементов (рис. 13.1) и связей между ними [51].
Выделим в соответствии с блочно-иерархическим подходом в структуре объекта некоторые подмножества элементов и назовем их блоками (на рисунке показаны штриховыми линиями). Пусть состояние каждой связи характеризуется одной фазовой переменной vi, zj или uk. Здесь vi относится к внутренним связям между элементами данного блока, zj и uk относятся к выходам и входам блока соответственно.
Рассмотрим важные для функциональных моделей понятия полной модели и макромодели.
Полная модель блока есть модель, составленная из моделей элементов с учетом межэлементных связей, т. е. модель, описывающая как состояние выходов, так и состояние каждого из элементов блока. Моделями элементов блока А являются уравнения, связывающие входные и выходные переменные: