Функция lsolve(M,v) – возвращает вектор х решения системы линейных уравнений M•x=v, где v – вектор правых частей системы линейных уравнений.
1. Запишите матрицу A, которая будет состоять из коэффициентов, стоящих перед неизвестными x1, х2, хЗ, х4:

 1.71 -0.8 1.44 -0.7
1.71 -0.8 1.44 -0.7
А:= 0.64 -0.85 -0.43 0,88
0.38 1.42 0.63 -1.55
0.83 -0.6 0.58 -1.22
2. Запишите матрицу В, которая будет состоять из столбца свободных членов:

 1.35
1.35
В:= 0.7
0.28
-0.47
3. Решите систему с помощью lsolve(M,v), записав x:=lsolve(A,B), и вы получите искомый результат:

 1.091
1.091
x = 0.767
0.563
1.018
5. Проверьте решение, вычислив выражение А•х-В, и вы получите нулевую матрицу, значит, вектор решений – х найден верно (рис. 48).
 0
0
А • х – В = 0
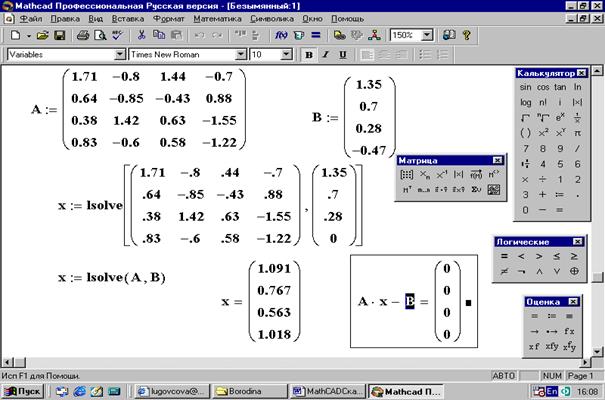
Рис. 48. Решение системы нелинейных уравнений с использованием lsolve
