Графический способ решения задач линейного программирования целесообразно использовать для:
• решения задач с двумя переменными, когда ограничения выражены неравенствами;
• решения задач со многими переменными при условии, что в их канонической записи содержится не более двух свободных переменных.
Запишем задачу линейного программирования с двумя переменными:
(6)
(7)
(8)
Каждое из неравенств (7)—(8) системы ограничений задачи геометрически определяет полуплоскость соответственно с граничными прямыми , В том случае, если система неравенств (7) — (8) совместна, область ее решений есть множество точек, принадлежащих всем указанным полуплоскостям. Так как множество точек пересечения данных полуплоскостей — выпуклое, то областью допустимых решений является выпуклое множество, которое называется многоугольником решений. Стороны этого многоугольника лежат на прямых, уравнения которых получаются из исходной системы ограничений заменой знаков неравенств на знаки равенств.
Областью допустимых решений системы неравенств (7) — (8) может быть:
• выпуклый многоугольник;
• выпуклая многоугольная неограниченная область;
• пустая область;
• луч;
• отрезок;
• единственная точка.
Целевая функция (6) определяет на плоскости семейство параллельных прямых, каждой из которых соответствует определенное значение Z. Вектор с координатами и , перпендикулярный этим прямым, указывает направление наискорейшего возрастания Z, а противоположный вектор - направление убывания Z.
Если в одной и той же системе координат изобразить область допустимых решений системы неравенств (7) - (8) и семейство параллельных прямых (6), то задача определения максимума функции Zсведется к нахождению в допустимой области точки, через которую проходит прямая из семейства Z=const, и которая соответствует наибольшему значению параметра Z.
Эта точка существует тогда, когда многоугольник решений не пуст и на нем целевая функция ограничена сверху. При указанных условиях в одной из вершин многоугольника решений целевая функция принимает максимальное значение.
Для определения данной вершины построим линию уровня , проходящую через начало координат и перпендикулярную вектору , и будем передвигать ее в направлении вектора до тех пор, пока она не коснется последней крайней (угловой) точки многоугольника решений. Координаты указанной точки и определяют оптимальный план данной задачи.
Отметим, что нахождение минимального значения Z при данной системе ограничений отличается от нахождения ее максимального значения при тех же ограничениях лишь тем, что линия уровня Z передвигается не в направлении вектора , а в противоположном направлении.
Для практического решения задачи линейного программирования (7) — (8) на основе ее геометрической интерпретации необходимо следующее.
1. Построить прямые, уравнения которых получаются в результате замены в ограничениях (7) - (8) знаков неравенств на знаки равенств.
2. Найти полуплоскости, определяемые каждым из ограничений задачи.
3. Определить многоугольник решений.
4. Построить вектор .
5. Построить прямую , проходящую через начало координат и перпендикулярную вектору .
6. Передвигать прямую в направлении вектора , в результате чего либо находят точку (точки), в которой целевая функция принимает максимальное значение, либо устанавливают неограниченность функции сверху на множестве планов.
7. Определить координаты точки максимума функции и вычислить значение целевой функции в этой точке.
Пример. Рассмотрим решение задачи об ассортименте продукции графическим способом. Математическая постановка имеет следующий вид:
целевая функция
ограничения
Построим многоугольник решений (рис. 1). Для этого в системе координат на плоскости изобразим граничные прямые:
(L1)
(L2)
(L3)
(L4)
Рис. 1. Решение задачи линейного программирования
графическим способом
Взяв какую-либо точку, например, начало координат, установим, какую полуплоскость определяет соответствующее неравенство. Полуплоскости, определяемые неравенствами, на рис. 1 показаны стрелками. Областью решений является многоугольник OABCD.
Для построения прямой строим вектор-градиент и через точку 0 проводим прямую, перпендикулярную ему. Построенную прямую Z_= 0 перемещаем параллельно самой себе в направлении вектора . Из рис. 1 следует, что по отношению к многоугольнику решений опорной эта прямая становится в точке С, где функция принимает максимальное значение. Точка С лежит на пересечении прямых L1 и L2.Для определения ее координат решим систему уравнений:
Оптимальный план задачи = 2,4, =1,4. Подставляя значения и в линейную функцию, получим: Zmax=3.2,4 + 4 . 1,4=12,8. Полученное решение означает, что объем производства продукции П1должен быть равен 2,4 ед., а продукции П2 — 1,4 ед. Доход, получаемый в этом случае, составит: Z=12,8 д. е.
Замечание. Графическим способом можно решать ЗЛП с числом переменных более двух. Для этого исходную задачу преобразуют методом Жордана-Гаусса.
Симплекс-метод.Этот один из первых специализированных методов оптимизации, нацеленный на решение задач линейного программирования, в то время как методы простого и направленного перебора могут быть применены для решения практически любой задачи оптимизации. Симплекс-метод был предложен американцем Г. Данцигом в 1951 г. Основная его идея состоит в продвижении по выпуклому многограннику ограничений от вершины к вершине, при котором на каждом шаге значение целевой функции улучшается до тех пор, пока не будет достигнут оптимум.

 (6)
(6) (7)
(7) (8)
(8) ,
,  с координатами
с координатами  и
и  , перпендикулярный этим прямым, указывает направление наискорейшего возрастания Z, а противоположный вектор - направление убывания Z.
, перпендикулярный этим прямым, указывает направление наискорейшего возрастания Z, а противоположный вектор - направление убывания Z. , проходящую через начало координат и перпендикулярную вектору
, проходящую через начало координат и перпендикулярную вектору  в направлении вектора
в направлении вектора  , в результате чего либо находят точку (точки), в которой целевая функция принимает максимальное значение, либо устанавливают неограниченность функции сверху на множестве планов.
, в результате чего либо находят точку (точки), в которой целевая функция принимает максимальное значение, либо устанавливают неограниченность функции сверху на множестве планов.



 (L1)
(L1) (L2)
(L2) (L3)
(L3) (L4)
(L4)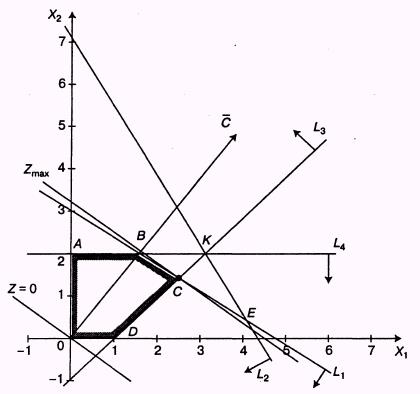
 строим вектор-градиент
строим вектор-градиент  и через точку 0 проводим прямую, перпендикулярную ему. Построенную прямую Z_= 0 перемещаем параллельно самой себе в направлении вектора
и через точку 0 проводим прямую, перпендикулярную ему. Построенную прямую Z_= 0 перемещаем параллельно самой себе в направлении вектора 
 = 2,4,
= 2,4,  =1,4. Подставляя значения
=1,4. Подставляя значения