При выборе электрического двигателя, приводящего в действие производственный механизм, необходимо соответствие механических свойств характеристикам производственного механизма.
Каждый производственный механизм в зависимости от технологического процесса имеет свою механическую характеристику. Механической характеристикой производственного механизма называется зависимость скорости вращения ωс от момента сопротивления производственного механизма Mс. Так как производственные механизмы обладают большим разнообразием характеристик. Чтобы как-то их классифицировать, используется эмпирическая формула:
Mс = M0 + (Mвр – Mсн)(ω/ωн)x
Mс – момент сопротивления производственного механизма при скорости ω. M0 – момент трения в движущихся частях производственного механизма. Mсн – момент сопротивления при номинальной скорости вращения ωн. x – показатель степени, характеризующий изменение момента сопротивления при изменении скорости.
1. При x=0 момент сопротивления не зависит от скорости вращения ω и механическая характеристика будет представлять собой прямую линию, параллельную оси скорости. 2. x=1 – линейно возрастающая характеристика. с увеличением сопротивления увеличивается и скорость вращения производственного механизма. 3. x=2 – характеристика не линейно возрастающая. Момент сопротивления будет зависеть от квадрата скорости. 4. x=-1 – характеристика нелинейно убывающая. Момент сопротивления Mс обратно пропорционален скорости, но при этом мощность будет оставаться постоянной.
Характеристика первого типа относится к таким производственным механизмам, как поршневые насосы, механизмы подачи станков, электрические приводы конвейеров.
Характеристики второго типа обычно бывают у механизмов подъема кранов.
Характеристиками третьего типа обладают вентиляторы, центробежные насосы, компрессоры.
Характеристику четвертого типа имеют приводы шпинделей и планшайб.
Электрические двигатели делятся на различные виды по жесткости характеристик:
1. Абсолютно жесткая характеристика, у которой скорость вращения не зависит от нагрузки. Жесткостью называется отношение приращения момента к приращению скорости.
β = ΔM / Δω
2. Жесткая характеристика. Наклон этой характеристики относительно максимальной скорости зависит от параметров двигателя. Характеристику этого типа имеет двигатель постоянного тока (ДПТ) и асинхронный двигатель на рабочей части механической характеристики.
3. Мягкая характеристика. Данная механическая характеристика отличается резким снижением скорости при увеличении нагрузки. Характеристика этого типа будет у двигателей постоянного тока независимого и смешанного возбуждения.
11 вопрос
зависимость между скоростью вращения и моментом сопротивления механизма n=f(Mc) называется механической характеристикой производственного механизма, а зависимость скорости вращения двигателя от вращающего момента на его валу n=f(M) называется механической характеристикой электродвигателя.
Механические характеристики служат основным критерием при выборе того или иного типа электродвигателя, поскольку механические свойства его должны соответствовать характеристикам производственного механизма. Электродвигатель должен также удовлетворять требованиям производственного механизма в отношении пусковых и перегрузочных свойств, характера изменения скорости при изменении нагрузки, величины перепада скорости и т. д.
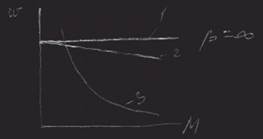
Механические характеристики производственных механизмов могут быть подразделены на следующие основные группы: 1) механическая характеристика, не зависящая от скорости; у производственных механизмов, обладающих такой характеристикой (подъемные краны, лебедки, транспортеры с постоянной массой перемещаемого груза), момент сопротивления Мс не зависит от скорости. К этой же категории могут быть с известным приближением отнесены механизмы, у которых основным моментом сопротивления является трение (например, механизмы передвижения кранов и др.), обычно в пределах рабочих скоростей момент трения изменяется незначительно; 2) механическая характеристика линейно-возрастаю-щая (рис. 4, а; прямая 2); у производственных механизмов, обладающих такой характеристикой (привод генератора с независимым возбуждением, если последний работает на постоянное внешнее сопротивление), момент сопротивления Мс линейно зависит от скорости, увеличиваясь с ее возрастанием; 3) механическая характеристика нелинейно-возрастающая— параболическая (рис. 4, а; кривая 3); у производственных механизмов, обладающих такой характеристикой (вентиляторы, центробежные насосы), момент сопротивления Mz зависит от квадрата скорости; 4) механическая характеристика нелинейно-спадающая (рис. 4,а; кривая 4); у производственных механизмов, обладающих такой характеристикой (некоторые токарные, фрезерные и другие металлорежущие станки), момент сопротивления Мс изменяется обратно пропорционально скорости, а мощность, потребляемая механизмом, остается постоянной.
Рис. 4. Механические характеристики а — производственных механизмов: б — электродвигателей
Приведенные типы механических характеристик производственных механизмов являются основными, дающими представление о наиболее распространенных механизмах.
Механические характеристики электродвигателей могут быть подразделены на три основные категории: 1) абсолютно жесткую, при которой скорость двигателя остается неизменной при любых изменениях момента на его валу (рис. 4,6; прямая 1). По такой характеристике работают синхронные электродвигатели; 2) жесткую, при которой скорость двигателя при изменении момента на его валу изменяется незначительно (рис. 4,6; кривая 2). Такой характеристикой обладают электродвигатели постоянного тока с параллельным возбуждением и асинхронные двигатели (в пределах рабочей части механической характеристики); 3) мягкую, при которой скорость двигателя при изменении момента на его валу значительно уменьшается (рис. 4,6; кривая 3). Мягкая характеристика свойственна двигателям постоянного тока с последовательным или смешанным возбуждением.
12 вопрос
Механическая характеристика нелинейно-спадающая. В таких характеристиках момент сопротивления изменяется обратно пропорционально скорости; при этом мощность, потребляемая механизмом, остается постоянной. Такими характеристиками обладают некоторые металлорежущие станки.
Обычно при проектировании электропривода механическая характеристика производственного механизма является уже заданной, а механическую характеристику электродвигателя необходимо подбирать. Это достигается подбором электродвигателя соответствующего типа и изменением электрических параметров; его цепей.
13 вопрос
Механическая часть электропривода представляет собой систему твёрдых тел, движение которых определяется механическими связями между телами. Если заданы соотношения между скоростями отдельных элементов, то уравнение движения электропривода имеет дифференциальную форму. Наиболее общей формой записи уравнений движения являются уравнения движения в обобщенных координатах (уравнения Лагранжа):
(2.19)
где
Wk – запас кинетической энергии системы, выраженный через обобщенные координаты qi и обобщенные скорости ;
Qi– обобщенная сила, определяемая суммой работ δAiвсех действующих сил на возможном перемещении .
Уравнение Лагранжа можно представить в другом виде:
(2.20)
Здесь L– функция Лагранжа, представляющая собой разность кинетической и потенциальной энергий системы:
L=Wk – Wn.
Число уравнений равно числу степеней свободы системы и определяется числом переменных – обобщенных координат, определяющих положение системы.
Запишем уравнения Лагранжа для <двухмассовой упругой системы (рис. 2.9).
Рис. 2.9. Расчетная схема двухмассовой механической части.
Функция Лагранжа в этом случае имеет вид
Для определения обобщенной силы необходимо вычислить элементарную работу всех приведённых к первой массе моментов на возможном перемещении:
Следовательно, т.к. обобщенная сила определяется суммой элементарных работ δA1 на участке δφ1 , то для определения величины получим:
=
Аналогично, для определения имеем:
Подставив выражение для функции Лагранжа в (2.20), получим:
или
Обозначив , получим:
(2.21)
Примем механическую связь между первой и второй массами абсолютно жёсткой, т.е. (рис. 2.10).
Подставив его в первое уравнение системы, получим:
или
(2.22)
Это уравнение иногда называют основным уравнением движения электропривода. С его помощью можно по известному электромагнитному моменту двигателя М,моменту сопротивления и суммарному моменту инерции оценить среднее значение ускорения электропривода, рассчитать время, за которое двигатель достигнет заданной скорости, и решить другие задачи, если влияние упругих связей в механической системе существенно.
Рассмотрим механическую систему с нелинейными кинематическими связями типа кривошипно-шатунных, кулисных и других подобных механизмов (рис. 2.11). Радиус приведения в них является переменной величиной, зависящей от положения механизма: .
Рис. 2.11. Механическая система с нелинейными кинематическими связями
Представим рассматриваемую систему в виде двухмассовой, первая масса вращается со скоростью ω и имеет момент инерции , а вторая движется с линейной скоростью V и представляет суммарную массу m элементов, жёстко и линейно связанных с рабочим органом механизма.
Связь между линейными скоростями ω и V нелинейная, причём . Для получения уравнения движения такой системы без учёта упругих связей воспользуемся уравнением Лагранжа (2.19), приняв в качестве обобщенной координаты угол φ. Определим обобщенную силу:
где
- суммарный момент сопротивления от сил, воздействующих на линейно связанные с двигателем массы; приведённый к валу двигателя;
FC – результирующая всех сил, приложенная к рабочему органу механизма и линейно связанным с ним элементам;
– возможное бесконечно малое перемещение массы m.
Нетрудно видеть, что
где
- радиус приведения.
Момент статической нагрузки механизма содержит пульсирующую составляющую нагрузки, изменяющуюся в функции угла поворота φ:
Запас кинетической энергии системы:
Здесь - суммарный приведённый к валу двигателя момент инерции системы.
Левую часть уравнения Лагранжа (2.19) можно записать в виде:
Таким образом, уравнение движения жёсткого приведённого звена имеет вид:
(2.23)
Оно является нелинейным с переменными коэффициентами.
Для жёсткого линейного механического звена уравнение статического режима работы электропривода соответствует и имеет вид:
.
Если при движении то имеет место или динамический переходный процесс, или принуждённое движение системы с периодически изменяющейся скоростью.
В механических системах с нелинейными кинематическими связями статические режимы работы отсутствуют. Если и ω=const, в таких системах имеет место установившийся динамический процесс движения. Он обусловлен тем, что массы, движущиеся линейно, совершают возвратно-поступательное движение, и их скорости и ускорения являются переменными величинами.
С энергетической точки зрения различают двигательные и тормозные режимы работы электропривода. Двигательный режим соответствует прямому направлению передачи механической энергии к рабочему органу механизма. В электроприводах с активной нагрузкой, а также в переходных процессах в электроприводе, когда происходит замедление движения механической системы, происходит обратная передача механической энергии от рабочего органа механизма к двигателю.
14 вопрос
Изменение питающего напряжения.При изменении питающего напряжения частота вращения п изменяется пропорционально U. Следовательно, подавая на обмотку якоря различные напряжения U1, U2, U3, можно получить семейство механических характе-
Рис. 133. Механические характеристики электродвигателей с последовательным (а) и независимым или параллельным (б) возбуждением при регулировании частоты вращения включением реостата в цепь обмотки якоря
Рис. 134. Механические характеристики электродвигателя с последовательным (а) и независимым (б) возбуждением при регулировании частоты вращения путем изменения питающего напряжения
Рис. 135. Схемы питания электродвигателя с последовательным возбуждением от генератора (а) и выпрямителя (б)
ристик 1, 2 и 3, у которых при любой нагрузке n1:n2:n3 = U1:U2:U3 (рис. 134). При уменьшении питающего напряжения механические характеристики двигателя смещаются в область меньших частот вращения и располагаются параллельно. Для осуществления указанного способа регулирования частоты вращения двигатель должен быть подключен к источнику постоянного тока с регулируемым напряжением: к генератору Т с независимым возбуждением (рис. 135, а) или выпрямителю Вn (рис. 135,б). Питание тяговых двигателей от генератора осуществляется на тепловозах, а от выпрямителя — на электровозах и электропоездах переменного тока. На электровозах и электропоездах выпрямитель подключают к трансформатору, позволяющему изменять напряжение, подаваемое на вход выпрямителя, а следовательно, и его выходное напряжение U. На тепловозах в цепях управления имеется специальная электрическая аппаратура, позволяющая изменять ток возбуждения генератора, т. е. его выходное напряжение U, ручным способом или автоматически.
Несмотря на то, что рассмотренный способ требует довольно сложного оборудования, его широко применяют на современных локомотивах и электропоездах, так как он обеспечивает плавное и экономичное (без потерь энергии в реостатах) регулирование частоты вращения в очень широких пределах. Следует отметить, что для электродвигателей с параллельным возбуждением указанный способ регулирования применять нельзя, так как при уменьшении питающего напряжения соответственно уменьшался бы магнитный поток двигателя и увеличивался ток обмотки якоря. В этом случае двигатель должен быть переведен на независимое возбуждение.
На э. п. с. постоянного тока напряжение, подводимое от контактной сети к электровозу или моторному вагону, не может регулироваться, поэтому здесь для изменения подаваемого к двигателям напряжения применяют последовательно-параллельное переключение тяговых двигателей. При этом изменяется напряжение, приходящееся на каждый двигатель локомотива, и частота вращения.
При регулировании частоты вращения двигателей путем их последовательно-параллельного переключения число возможных схем соединений зависит от числа двигателей, установленных на данном локомотиве. Например, на четырехосных электровозах может быть использовано последовательное соединение тяговых двигателей (рис. 136, а); при этом напряжение, подводимое к двигателю, в 4 раза меньше напряжения U в контактной сети и двигатель имеет некоторую минимальную частоту вращения nmin при заданном моменте Мвн. При соединении двигателей в две параллельные группы (рис. 136, б), в каждую из которых включено по два последовательно соединенных двигателя, напряжение, подводимое к каждому двигателю, будет в 2 раза меньше напряжения U в контактной сети и частота его вращения будет составлять 2nmin. Характеристики двигателей при этом располагаются одна над другой (рис. 136, в).
Последовательно-параллельное переключение тяговых двигателей применяют также на тепловозах. Это позволяет ограничить диапазон регулирования напряжения генератора, от которого зависят его габаритные размеры и масса.
15 вопрос
Основным преимуществом электродвигателей с параллельным возбуждением является возможность широкого и плавного регулирования их скорости вращения.
Уравнения, выведенные в особенностях электродвигателей постоянного тока, показывают, что искусственная регулировка скорости вращения может производиться тремя способами: изменением сопротивления якорной цепи, изменением магнитного потока и изменением напряжения, подводимого к якорю.
Регулирование скорости вращения изменением сопротивления якорной цепи. Для регулирования скорости вращения электродвигателя в цепь якоря последовательно включают дополнительные сопротивления (см. рис. 10). Уравнение (30) показывает, что каждому новому значению дополнительного сопротивления соответствует своя искусственная механическая характеристика. То же самое относится и к скоростным характеристикам. Анализ этого уравнения показывает, что между сопротивлением якорной цепи и скоростью вращения существует линейная зависимость, т. е. при любом значении R характеристики электродвигателя остаются прямолинейными и при холостом ходе проходят через точку п = п0. Очевидно, чем выше величина дополнительного сопротивления, тем мягче искусственная характеристика электродвигателя (рис. 12). Это означает, что при одной и той же нагрузке скорость электродвигателя тем ниже, чем выше величина дополнительного сопротивления, включенного в якорную цепь. Уменьшение скорости объясняется дополнительным падением напряжения в добавочном сопротивлении.
Процесс перехода от одной скорости к другой происходит следующим образом. Допустим, электродвигатель, развивая момент М = Мс, работает устойчиво на естественной характеристике а в точке 1 (контакты 1У, 2У и 3У на рис. 10 замкнуты). Если необходимо снизить скорость вращения электродвигателя, размыкают контакт 1У и тем самым в цепь якоря вводят дополнительное сопротивление R1. Согласноуравнению (30) электродвигатель должен перейти на характеристику b, соответствующую новому значению сопротивления якорной цепи. Электродвигатель обладает значительной инерцией и при переключении сопротивлений скорость его вращения мгновенно измениться не может. Поэтому в первый момент электродвигатель переходит на работу в соответствующей точке 2 на характеристике b. При этом ток якоря и вращающий момент уменьшаются, нарушается равновесие моментов (М<Мc) и скорость электродвигателя начинает снижаться до тех пор, пока снова не восстановится равновесие моментов (М= Мс). Следовательно, устойчивая работа электродвигателя будет теперь в точке 3 на характеристике b.
Аналогичным образом происходит переход на характеристики с и d при включении сопротивлений R2 и R3.
Для увеличения скорости вращения электродвигателя необходимо отключить часть дополнительного сопротивления. Например, если электродвигатель устойчиво работает в точке 7 на характеристике d, то при отключении сопротивления R3 (при замыкании контактов 3У) происходит переход на работу по характеристике с. При этом первоначально (в точке 8) резко увеличивается ток и момент электродвигателя и скорость начинает возрастать. В точке 5 восстанавливается равновесие моментов и увеличение скорости прекращается. При последовательном отключении остальных ступеней регулировочного реостата происходит постепенное возрастание скорости вращения до величины n1.
Данный способ регулирования скорости вращения отличается простотой электрической схемы и применяется сравнительно часто для электродвигателей крановых механизмов. Однако ему присущи и некоторые существенные недостатки. В частности, регулирование скорости рассмотренным способом сопровождается большими .потерями мощности в реостате. Поэтому стараются применять его лишь в тех случаях, когда мощность электродвигателя невелика или снижение скорости вращения должно быть кратковременным. Большим недостатком является также громоздкость и высокая стоимость регулировочного реостата, который должен быть рассчитан на номинальный ток электродвигателя. Это заставляет уменьшать число ступеней реостата и предусматривать специальные меры для его охлаждения.
16 вопрос
Изменение магнитного потока. Для того чтобы изменить магнитный поток Ф, регулируют ток возбуждения двигателя с помощью
Рис. 136. Схемы соединения тяговых двигателей на четырехосных электровозах или электропоездах (а и б) и механические характеристики двигателей при различных схемах соединения (в): 1 — последовательное соединение; 2— последовательно-параллельное соединение
Рис. 137. Схема включения регулировочного реостата параллельно обмотке возбуждения в двигателе с последовательным возбуждением (а) и механические характеристики (б) при различных сопротивлениях реостата
регулировочного реостата Rрв (рис. 137, а). В двигателях с после-довательньм возбуждением регулировочный реостат включают параллельно обмотке возбуждения, вследствие чего через обмотку возбуждения будет протекать только часть тока якоря (другая часть ответвляется в точке О в реостат Rрв). Обычно регулировочный реостат имеет несколько ступеней с сопротивлениями R1, R2, R3, которые позволяют получать несколько ступеней регулирования тока возбуждения двигателя.
Включение ступеней R1, R2, R3 осуществляется контакторами 1, 2 и 3; при этом механические характеристики двигателя 2 (при включении ступени R1), 3 (при включении R1 и R2 и 4 (при включении R1, R2 и R3) располагаются выше естественной характеристики 1 (рис. 137,б).
Степень регулирования тока возбуждения характеризуется коэффициентом регулирования возбуждения ?, который представляет собой отношение тока возбуждения Iв0 при ослабленном возбуждении (включен регулировочный реостат Rрв) к току возбуждения Iвн при нормальном возбуждении при одном и том же токе в обмотке якоря:
? = Iв0/Iвн = Rвн/(Rв+Rвн)
где Rв — сопротивление обмотки возбуждения.
Рассмотренный способ регулирования прост и экономичен, поэтому его широко применяют на локомотивах и электропоездах. Однако в этом случае регулирование частоты вращения можно осуществлять только в сравнительно небольшом диапазоне. Нижний предел nmin ограничивается насыщением магнитной цепи машины, которое не позволяет увеличивать в значительной степени магнитный поток, верхний предел nmax—условиями устойчивости (при сильном уменьшении Ф двигатель идет вразнос), а также тем, что при глубоком ослаблении возбуждения сильно увеличивается ток якоря Iя, что приводит к возрастанию реактивной э. д. с. и искажающего действия реакции якоря. При этом повышается опасность возникновения искрения на коллекторе и появления кругового огня. По этой причине двигатели, предназначенные для работы в режимах глубокого ослабления возбуждения, обязательно должны иметь компенсационную обмотку и пониженное значение реактивной э. д. с. при номинальном режиме. Обычно предельное значение коэффициента возбуждения ? для двигателей без компенсационной обмотки составляет 0,3—0,33, а при наличии компенсационной обмотки — 0,2.
В двигателях с независимым и параллельным возбуждением регулировочный реостат, посредством которого изменяют ток возбуждения Iв и магнитный поток Ф, включают последовательно с обмоткой возбуждения (см. рис. 125). В этом случае при изменении тока возбуждения частота вращения n0 при холостом ходе будет изменяться, т. е. механическая характеристика 2 при ослабленном возбуждении будет располагаться выше характеристики 1 при нормальном возбуждении (рис. 138). Однако характеристики 1 и 2 при различных значениях Ф не будут параллельны, так как согласно формуле (65) изменяется снижение частоты вращения, обусловленное падением напряжения Iя?Rя в цепи обмотки якоря.


 (2.19)
(2.19) ;
; .
. (2.20)
(2.20)

 необходимо вычислить элементарную работу всех приведённых к первой массе моментов на возможном перемещении:
необходимо вычислить элементарную работу всех приведённых к первой массе моментов на возможном перемещении:
 =
= 
 имеем:
имеем:

 , получим:
, получим: (2.21)
(2.21) (рис. 2.10).
(рис. 2.10).

 и второе уравнение системы примет вид:
и второе уравнение системы примет вид:
 (2.22)
(2.22) и суммарному моменту инерции
и суммарному моменту инерции  оценить среднее значение ускорения электропривода, рассчитать время, за которое двигатель достигнет заданной скорости, и решить другие задачи, если влияние упругих связей в механической системе существенно.
оценить среднее значение ускорения электропривода, рассчитать время, за которое двигатель достигнет заданной скорости, и решить другие задачи, если влияние упругих связей в механической системе существенно. .
.
 , а вторая движется с линейной скоростью V и представляет суммарную массу m элементов, жёстко и линейно связанных с рабочим органом механизма.
, а вторая движется с линейной скоростью V и представляет суммарную массу m элементов, жёстко и линейно связанных с рабочим органом механизма. . Для получения уравнения движения такой системы без учёта упругих связей воспользуемся уравнением Лагранжа (2.19), приняв в качестве обобщенной координаты угол φ. Определим обобщенную силу:
. Для получения уравнения движения такой системы без учёта упругих связей воспользуемся уравнением Лагранжа (2.19), приняв в качестве обобщенной координаты угол φ. Определим обобщенную силу:
 - суммарный момент сопротивления от сил, воздействующих на линейно связанные с двигателем массы; приведённый к валу двигателя;
- суммарный момент сопротивления от сил, воздействующих на линейно связанные с двигателем массы; приведённый к валу двигателя; – возможное бесконечно малое перемещение массы m.
– возможное бесконечно малое перемещение массы m.
 - радиус приведения.
- радиус приведения.

 - суммарный приведённый к валу двигателя момент инерции системы.
- суммарный приведённый к валу двигателя момент инерции системы.
 (2.23)
(2.23) и имеет вид:
и имеет вид: .
. то имеет место или динамический переходный процесс, или принуждённое движение системы с периодически изменяющейся скоростью.
то имеет место или динамический переходный процесс, или принуждённое движение системы с периодически изменяющейся скоростью. и ω=const, в таких системах имеет место установившийся динамический процесс движения. Он обусловлен тем, что массы, движущиеся линейно, совершают возвратно-поступательное движение, и их скорости и ускорения являются переменными величинами.
и ω=const, в таких системах имеет место установившийся динамический процесс движения. Он обусловлен тем, что массы, движущиеся линейно, совершают возвратно-поступательное движение, и их скорости и ускорения являются переменными величинами.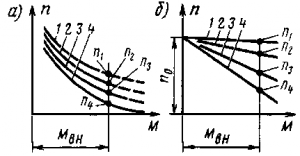 Рис. 133. Механические характеристики электродвигателей с последовательным (а) и независимым или параллельным (б) возбуждением при регулировании частоты вращения включением реостата в цепь обмотки якоря
Рис. 133. Механические характеристики электродвигателей с последовательным (а) и независимым или параллельным (б) возбуждением при регулировании частоты вращения включением реостата в цепь обмотки якоря Рис. 134. Механические характеристики электродвигателя с последовательным (а) и независимым (б) возбуждением при регулировании частоты вращения путем изменения питающего напряжения
Рис. 134. Механические характеристики электродвигателя с последовательным (а) и независимым (б) возбуждением при регулировании частоты вращения путем изменения питающего напряжения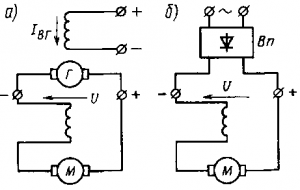 Рис. 135. Схемы питания электродвигателя с последовательным возбуждением от генератора (а) и выпрямителя (б)
Рис. 135. Схемы питания электродвигателя с последовательным возбуждением от генератора (а) и выпрямителя (б)
 Рис. 136. Схемы соединения тяговых двигателей на четырехосных электровозах или электропоездах (а и б) и механические характеристики двигателей при различных схемах соединения (в): 1 — последовательное соединение; 2— последовательно-параллельное соединение
Рис. 136. Схемы соединения тяговых двигателей на четырехосных электровозах или электропоездах (а и б) и механические характеристики двигателей при различных схемах соединения (в): 1 — последовательное соединение; 2— последовательно-параллельное соединение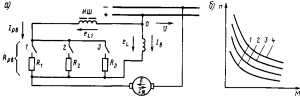 Рис. 137. Схема включения регулировочного реостата параллельно обмотке возбуждения в двигателе с последовательным возбуждением (а) и механические характеристики (б) при различных сопротивлениях реостата
Рис. 137. Схема включения регулировочного реостата параллельно обмотке возбуждения в двигателе с последовательным возбуждением (а) и механические характеристики (б) при различных сопротивлениях реостата