Вопрос Электропривод, электрический привод, совокупность устройств для преобразования электрической энергии в механическую и регулирования потока преобразованной энергии по определённому закону. Э. является наиболее распространённым типом привода.
Историческая справка. Создание первого Э. относится к 1838, когда в России Б. С. Якоби произвел испытания электродвигателя постоянного тока с питанием от аккумуляторной батареи, который был использован для привода гребного винта судна. Однако внедрение Э в промышленность сдерживалось отсутствием надежных источников электроэнергии. Даже после создания в 1870 промышленного электромашинного генератора постоянного тока работы по внедрению Э. имели лишь частное значение и не играли заметной практической роли. Начало широкого промышленного применения Э связано с открытием явления вращающегося магнитного поля и созданием трехфазного асинхронного электродвигателя, сконструированного М. О. Доливо-Добровольским. В 90-х гг. широкое распространение на промышленных предприятиях получил Э., в котором использовался асинхронный электродвигатель с фазным ротором для сообщения движения исполнительным органам рабочих машин. В 1890 суммарная мощность электродвигателей по отношению к мощности двигателей всех типов, применяемых в промышленности, составила 5%, уже в 1927 этот показатель достиг 75%, а в 1976 приближался к 100%. Значительная доля принадлежит Э., используемому на транспорте.
Основные типы Э. По конструктивному признаку можно выделить три основных типа Э.: одиночный, групповой и многодвигательный. Одиночный Э. применяют в ручных машинах, простых металлообрабатывающих и древообрабатывающих станках и приборах бытовой техники. Групповой, или трансмиссионный, Э. в современном производстве практически не применяется. Многодвигательные Э. — приводы многооперационных металлорежущих станков, мономоторный тяговый Э. рельсовых транспортных средств. Кроме того, различают Э. реверсивные и нереверсивные (см. Реверсивный электропривод), а по возможности управления потоком преобразованной механической энергии — нерегулируемые и регулируемые (в том числе автоматизированный с программным управлением и др.)
Основные части Э. Э. всех типов содержат основные части, имеющие одинаковое назначение: исполнительную и устройства управления.
Исполнительная часть Э. состоит обычно из одного или нескольких электродвигателей (см. Двигатель электрический) и передаточного механизма — устройства для передачи механической энергии двигателя рабочему органу приводимой машины. В нерегулируемых Э. чаще всего используют электродвигатели переменного тока, подключаемые к источнику питания либо через контактор или автоматический выключатель, играющий роль защитного устройства, либо при помощи штепсельного разъёма (например, в бытовых электроприборах). Частота вращения ротора электродвигателя такого привода, а следовательно, и скорость перемещения связанного с ним рабочего механизма, изменяется только в зависимости от нагрузки исполнительного механизма. В мощных нерегулируемых Э. применяют асинхронные электродвигатели. Для ограничения пусковых токов между двигателем и источником устанавливают пусковые реакторы или автотрансформаторы, которые после разгона двигателя отключают. В регулируемых Э. чаще всего применяют электродвигатели постоянного тока, частоту вращения якорей которых можно изменять плавно, т. е. непрерывно, в широком диапазоне при помощи достаточно простых устройств управления.
В устройства управления входят: кнопочный пульт (для пуска и останова электродвигателя), контакторы, блок-контакты, преобразователи частоты и напряжения, предохранители, а также блоки защиты от перегрузок в аварийных режимах. При питании Э. от источника переменного тока, что характерно для Э., используемых в промышленности и на электроподвижном составе, двигатели которого питаются от сети переменного тока, в качестве преобразующих устройств применяют электромашинные или статические преобразователи электроэнергии — выпрямители. При питании от источника постоянного тока, что характерно для автономных электроэнергетических систем и электроподвижного состава, двигатели которого питаются от сети постоянного тока, преобразующие устройства выполняют в виде релейно-контакторных систем или статических преобразователей (см. Преобразовательная техника). В 70-е гг. 20 в. всё чаще и в регулируемых Э. стали применять трёхфазные асинхронные и синхронные двигатели, регулирование режимов работы которых осуществляют с помощью статических, в основном полупроводниковых, преобразователей частоты. Э. со статическими преобразователями энергии, выполненными на базе ртутных или полупроводниковых вентилей, называются вентильными Э. Единичная мощность вентильных Э. переменного тока, используемых, например, для шахтных мельниц, достигает 10 Мвт и более. Применение в Э. вентильных преобразовательных устройств позволяет решать наиболее экономичным образом задачу возврата энергии от электродвигателя источнику питания (см. Рекуперативное торможение).
К важным показателям, определяющим характеристики устройств управления регулируемого Э., следует отнести плавность регулирования режима работы рабочего механизма, во многом зависящую от плавности регулирования приводного электродвигателя, и быстродействие. Релейно-контакторные устройства управления при сравнительно низком быстродействии обеспечивают ступенчатое (дискретное) регулирование режимов работы, быстродействующие статические системы — непрерывное регулирование. В простейших Э. относительно небольшой мощности операции, связанные с регулированием режима работы исполнительного механизма, производят при помощи ручного управления. Недостатком ручного управления является инерционность процесса регулирования и вызываемое этим снижение производительности исполнительного механизма, а также невозможность точного воспроизведения повторяющихся производственных процессов (например, при частых пусках). Регулирование режимов работы исполнительных механизмов Э. обычно осуществляют при помощи устройств автоматического управления. Такой Э., называется автоматизированным, широко используется в системах автоматического управления (САУ). В разомкнутых САУ изменение возмущающего воздействия (например, нагрузки на валу электродвигателя) вызывает изменение заданного режима работы Э. В замкнутых САУ благодаря связи между входом и выходом системы во всех режимах работы автоматически поддерживаются заданные характеристики, которые при этом можно и регулировать по определенному закону. В таких системах находят все более широкое применение ЭВМ. Одной из разновидностей автоматизированного Э. является следящий электропривод, в котором исполнительный орган с определённой точностью воспроизводит движения рабочего механизма, задаваемые управляющим органом. По способу действия различают следящие Э. с релейным, или дискретным, управлением и с непрерывным управлением. Следящие Э. характеризуются мощностями от нескольких вт до десятков и сотен квт, применяются в различных промышленных установках, военной технике и др. В 60-е гг. 20 в. в различных областях техники нашли применение Э. с числовым программным управлением (ЧПУ). Такой Э. используют в многооперационных металлорежущих станках, автоматических и полуавтоматических линиях. Создание автоматизированного Э. для обслуживания отдельных технологических операций и процессов — основа комплексной автоматизации производства. Для решения этой задачи необходимо совершенствование Э. как в направлении расширения диапазона мощностей Э. и возможностей регулирования, так и в направлении повышения надёжности и создания Э. с оптимальными габаритами и массой.
Вопрос 2
Роль электропривода в хозяйстве Автоматизированный электропривод является энергетической основой автоматизации производственных процессов. Его развитие базируется на новейших достижениях научно-технической революции, в частности в области силовой полупроводниковой техники, микроэлектронных средств управления и средств управляющей вычислительной техники. В связи с быстрыми темпами развития базовых отраслей техники актуальной является задача оснащения электроприводов новейшими техническими средствами в целях более полного удовлетворения усложняющихся требований автоматизации производственных процессов. Эти задачи традиционно обсуждаются на конференциях по проблемам автоматизированного электропривода. Из наиболее важных проблем настоящего этапа следует выделить рациональное потребление энергии, внедрение средств вычислительной техники, создание электроприводов роботов и манипуляторов.
Актуальность первой из указанных проблем следует из того, что современный электропривод является наиболее крупным потребителем вырабатываемой в стране электроэнергии. Снижение потребления энергии электроприводами — весомый вклад в реализацию Энергетической программы. Конференция проходила под девизом «Эффективное использование энергетических, материальных и трудовых ресурсов». Этот девиз получил отражение во многих статьях настоящей книги, в которых рассматриваются вопросы энергосбережения, улучшения качества электроэнергии, снижения материалоемкости и трудовых затрат в процессе разработки и производства элементов электроприводов и комплектных устройств.
В области вычислительной техники народное хозяйство страны переживает переломный момент. Идет бурный процесс внедрения средств вычислительной техники во всех отраслях экономики. Перспективным является использование этих средств в электроприводе. Значительное внимание уделяется вопросам применения в электроприводе цифровых управляющих устройств, в том числе микропроцессоров. Ряд статей посвящен особенностям разработки систем электроприводов с микропроцессорным управлением, проблемам аппаратной реализации таких систем, методам их исследования.
Автоматизированный электропривод с унифицированными системами регулирования в последнее десятилетие завоевал прочные позиции среди всех видов электроприводов, и область применения его постоянно расширяется.
Все большее распространение получает комплектный электропривод на базе законченной унифицированной конструкции, включающей в себя все основные элементы электропривода с полной или повышенной заводской готовностью. Создание его требует комплексного подхода к выбору двигателя, источников питания, системы регулирования с единых позиций на базе всесторонней унификации. Развивается она одновременно по нескольким направлениям: унификация составных элементов (ячеек, блоков, преобразовательных устройств), структурных и принципиальных схем, методов проектирования и расчетов, методов наладки. Такова тенденция развития электропривода в РФ и ряде зарубежных стран.
Основные вопросы теории и практики электропривода с унифицированными системами регулирования — системами подчиненного регулирования с последовательной коррекцией — разработаны в нашей стране ВНИИЭлектроприводом и особенно коллективом инженеров во главе с доктором технических наук О. В. Слежановским. Большой вклад в развитие таких электроприводов вносят коллективы институтов Тяжпромэлектропроект, Укртяжпромэлектропроект и др.
Промышленные роботы и построенные на их основе роботизированные комплексы являются перспективным средством комплексной автоматизации производственных процессов. Применение роботов позволяет существенно повысить производительность труда, эффективность действующего и вновь проектируемого оборудования, а также избавить человека от монотонных, физически тяжёлых и вредных для здоровья работ.
Роботы могут перемещать объект манипулирования с заданной скоростью по сложным пространственным траекториям. Их можно легко перенастраивать и перепрограммировать. Благодаря этим свойствам роботы успешно используют для гибкой автоматизации процессов сварки [9], окраски, сборки, обслуживания в общем, комплексе различного технологического и транспортного оборудования. В последнее время в связи с задачами комплексной автоматизации производства и освоение новых областей деятельности человека (под водой, в опасных средах, в космосе ) большое внимание уделяется автоматизации операций манипулирования- перемещение и ориентации изделий и инструмента.
Манипуляторы при свободном перемещении рабочего органа представляют собой пространственный механизм с разомкнутой кинематической цепью. Его звенья связаны кинематическими парами пятого класса (вращательными или поступательными), оснащёнными приводами. Каждая такая кинематическая пара с приводом обеспечивает одну степень подвижности манипулятора. Число, вид и взаимное расположение степеней подвижности определяют манипуляционные возможности устройства.
Для автоматизации повторяющихся операций манипуляторы снабжаются системой программного управления. Манипуляторы с малым количеством степеней подвижности (n=1…3), работающие по жёсткой программе, называют автооператорами. Однако эти признаки условны, так как любое автоматическое устройство обычно предусматривает возможность перенастройки, в том числе замену механического программоносителя- кулачка, для старых моделей манипуляторов. Свободно программируемые автоматические манипуляторы с большим числом степеней подвижности (n=5…6), используемые в промышленном производстве, называют промышленными роботами.
Вопрос 2
По мере развития и усложнения производственной техники и необходимости дробления механической энергии паровая машина все более переставала быть универсальным двигателем. Ее функции постепенно и во всевозрастающем объеме переходят к другим, более совершенным и более эффективным машинам-двигателям. Паровая турбина становится двигателем электрогенераторов и крупных морских судов, дизель — двигателем локомотивов, судов, тракторов, экскаваторов; в автомобилях же и самолетах устанавливают легкий и экономичный бензиновый мотор.
В многочисленных рабочих и технологических машинах главным становится электрический двигатель.
Применение в промышленности электропривода вместо паровых машин позволяло концентрировать производство электроэнергии на крупных электрических станциях, что вело к существенному упрощению системы промышленного энергоснабжения и к значительному ее удешевлению.
Электропривод обеспечил широкое развитие разнообразных типов металообрабатывающих станков, подъемных машин, лифтов, конвейеров, мотор-вагонов, погрузочно-разгрузочных машин и многих других видов производственной техники.
В 80—90-х годах основным электрическим двигателем, применявшимся в промышленности, был двигатель постоянного тока.
Основную сферу применения электропривода постоянного тока составляли крупные машинные агрегаты типа прокатных станов, шахтных подъемных машин и некоторые другие виды оборудования.
По мере дальнейшего развития электротехники, позволившего создать экономически выгодную и технически несложную систему трехфазного тока, открывались широкие возможности применения в промышленном производстве асинхронных двигателей переменного тока.
Трехфазные двигатели могли широко использоваться в металлорежущих станках, в горных, строительных и текстильных машинах, в конвейерах, насосах, вентиляторах и т. д.
Простота конструкции асинхронного двигателя, особенно с коротко-замкнутым ротором, позволила устанавливать в цехе или на заводе сотни и тысячи таких двигателей.
Асинхронные двигатели, надежные в эксплуатации, могли изготовляться герметически закрытыми, и, следовательно, их можно было использовать в самых тяжелых условиях: при повышенной влажности, в атмосфере бензиновых паров, различных газов и т. п.
Асинхронные двигатели без повреждений выдерживают значительные кратковременные перегрузки. К концу 90-х годов электромашиностроительные заводы различных стран уже выпускали асинхронные двигатели в большом количестве и в широком диапазоне мощностей.
Внедрение электрического привода играло революционизирующую роль в промышленном производстве. Сначала электродвигатели устанавливали для привода отдельных машин и станков большой мощности. Затем в цехах предприятий стали заменять паровую машину, выполнявшую функции центрального привода, электродвигателем. Так создавался групповой электропривод с многочисленными трансмиссиями в цеху. Это неизбежно создавало повышенную опасность при работе и обусловливало тяжелые производственные условия.
Трансмиссионные передачи представляли собой систему основных и распределительных валов с насаженными на них шкивами, от которых движение с помощью ремней передавалось на шкивы станков. Вся система получала вращение от мощного центрального двигателя, расположенного в цеху или вне цеха.
В дальнейшем в связи с непрерывным ростом числа приводимых от одного двигателя рабочих машин энергию центральной двигательной установки начали рассредоточивать на несколько двигателей, размещенных в здании цеха. Единую трансмиссию делили на участки, обслуживавшие отдельные группы; такая групповая трансмиссия позволяла с большей гибкостью и надежностью управлять станками. Характерным примером группового электропривода может служить один из цехов Сестрорецкого оружейного завода, где в 1911 г. все металлорежущие станки были объединены в группы, каждая из которых предназначалась для одного вида работ и приводилась в действие общим электродвигателем через единый вал.
Совершенствование промышленных электродвигателей обусловило целесообразность применения для привода станков одиночного, или индивидуального, электропривода. Такой привод, соединенный лишь с одним станком, освобождает цехи промышленных предприятии от многочисленных трансмиссий, уменьшает холостые ходы машин, намного сокращает непроизводительные потери энергии.
Индивидуальный электропривод позволяет каждому отдельному исполнительному механизму работать при наивыгоднейших скоростях; он дает возможность значительно ускорить процессы пуска и изменения направления вращения.
Эволюция радиалъно-сверлилъных станков на различных этапах развития электропривода а — групповой привод с трансмиссионными передачами; б, е, г — индивидуальный привод с различной конструктивной компоновкой; д — многодвигательный привод
Индивидуальный электропривод существенно повлиял и на конструкцию самих рабочих машин. Слияние приводного двигателя с исполнительным механизмом получалось иногда настолько тесным, что конструктивно они представляли собой единое целое.
Наиболее гармоничная конструктивная связь электропривода со станком осуществлялась при использовании фланцевых электродвигателей, которые выпускались в горизонтальном и вертикальном исполнении и могли непосредственно присоединяться к механизмам станков без промежуточных ременных передач.
Фланцевые двигатели получили применение прежде всего для привода высокоскоростных шпинделей сверлильных, расточных, шлифовальных, полировальных и деревообрабатывающих станков.
Эффективным оказалось использование в качестве индивидуального привода встроенных электродвигателей и особенно двигателей с изменяемым числом оборотов (регулируемый привод). При электрическом или электромеханическом регулировании скорости создаются возможности значительного упрощения кинематической схемы металлорежущих станков.
В начале XX в. преимущества использования индивидуального электропривода в различных отраслях производства, особенно в машиностроении, были доказаны. Такой привод на базе трехфазного тока получил широкое применение в промышленности. Этому способствовало и то, что электромашиностроительные предприятия освоили выпуск крупных серий асинхронных двигателей сравнительно небольшой мощности, предназначенных для металлорежущих станков, а также для ткацких, прядильных, полиграфических, деревообрабатывающих и других машин. Трехфазные электродвигатели очень быстро стали проникать не только на механические, но и на цементные и кирпичные заводы, на текстильные и бумажные фабрики, в рудники и шахты.
Развитие индивидуального электропривода рабочих машин привело к еще более совершенной системе — многодвигательному электроприводу. В этом случае уже не только сама машина, но каждый исполнительный механизм единой машины приводится в движение отдельным электродвигателем.
Например, в металлорежущем станке один двигатель приводит во вращение шпиндель, другой обеспечивает подъем или опускание рабочего органа, третий — поворот и т. д. Такой привод обычно снабжен развитой системой регулирования и автоматики.
В первых десятилетиях XX в. многодвигательный привод был осуществлен прежде всего в радиально-сверлильных и шлифовальных станках. Так, в станке для шлифовки шеек вагонных осей устанавливали шесть двигателей: два из них вращали шлифовальные круги, два обеспечивали подачу кругов в процессе обработки, один вращал обрабатываемую деталь и один приводил в действие насос и гидравлический домкрат.
Впоследствии многодвигательный электропривод, обеспечивающий автоматическое выполнение технологических операций и согласование отдельных движений, получил большое распространение в станкостроении. Вследствие сокращения вспомогательных операций, более точного и плавного регулирования скорости существенно повысилась производительность станков, облегчился труд рабочих, улучшилось качество изделий.
Существенные преимущества многодвигательного привода стимулировали его использование в горных, металлургических, текстильных, полиграфических и многих других машинах
Полная структурная схема электропривода включает в себя структурные схемы составных частей: механической части, электромеханического преобразователя энергии, электрического преобразователя и задающего устройства.
Структурная схема системы ПЧ – АД в общем виде сложна. Если допустить определённые ограничения (β = const, Мк = const и др.), то для настройки систем управления можно составить структурную схему для рабочего участка механической характеристики. Однако при таких допущениях возникают погрешности в расчётах электромеханического преобразования энергии. Отсутствуют способы расчета токов в цепях двигателя. Существенно искажаются показатели нагрева, так как для расчета приходится использовать метод эквивалентного момента, также искажаются энергетические показатели системы электропривода. Поэтому сложность структурной схемы ПЧ – АД зависит от задач, которые с её помощью нужно решать.
При изучении системы автоматического регулирования (САР) ее схему удобно представлять не в виде соединения ее элементов, классифицированных по функциональному назначению и принципу действия, а в виде структурной схемы, т.е. в виде соединения динамических звеньев. Динамическое звено - это математическая модель элемента или его части, записанная в виде дифференциального уравнения или передаточной функции. В теории автоматического управления (ТАУ) динамические звенья, которые описываются дифференциальными уравнениями не выше второго порядка, принято называть типовыми динамическими звеньями.
Таким образом, если функциональная схема, составленная из функциональных элементов, поясняет принцип действия САР, то структурная схема, составленная из типовых динамических звеньев, показывает схему прохождения и характер преобразования сигналов в системе авторегулирования. При этом отдельные динамические звенья не обязательно соответствуют определенным функциональным элементам: один функциональный элемент может быть представлен несколькими динамическими звеньями, а иногда несколько функциональных элементов объединяются в одно динамическое звено.
Структурную схему составляют на основании функциональной схемы, причем, вначале определяют связи, по которым сигналы распространяются в прямом направлении, а затем находят связи обратного прохождения сигналов. После этого вводят возмущающие воздействия.
Передаточные функции можно получать не только по дифференциальным уравнения системы, а и по ее структурной схеме. Следовательно, структурная схема есть форма записи дифференциального уравнения системы.
Вывод передаточных функции объекта регулирования. Поведение любой системы в динамическом режиме можно описать дифференциальным уравнением, составленным для нее в переходном режиме в соответствии с ее физической природой. В итоге физическая задача определения выходной величины системы при изменяющемся входном воздействии сводится к математической задаче поиска решения дифференциального уравнения.
Для приведенной на рисунке 2.2 функциональной схемы проектируемого автоматизированного тягового привода поезда на рисунке 2.3 представляем структурную схему.
Вопрос 3
Функциональные схемы предназначены для разъяснения процессов, происходящих в изделии в целом, а также в отдельных его функциональных частях. Следовательно, для одного изделия может быть выпущено несколько функциональных схем.
На функциональных схемах должны быть изображены все функциональные части, функциональные группы, устройства, элементы, необходимые для разъяснения происходящих в изделии процессов, и показаны связи между ними. Функциональные части, устройства, элементы изображают в виде УГО, установленных стандартами ЕСКД, или прямоугольников.
Функциональные части и связи изображают независимо от их действительного расположения в изделии. Функциональный процесс, как правило, представляют слева направо и (или) сверху вниз. Допускается на этих схемах изображать пункты измерения и (или) контроля, приводить необходимые пояснения, диаграммы, таблицы и параметры физических величин в характерных точках. В стандарте установлены правила присвоения обозначений функциональным группам, устройствам, элементам.
Функциональные схемы электроприводов и систем автоматизации определяют функционально-блочную структуру отдельных узлов исполнительных механизмов, силовой части приводов, управления и регулирования, автоматического контроля, сигнализации, а также оснащение объекта управления приборами и средствами автоматизации.
При разработке схем решают следующие задачи: получение информации о работе электроприводов и технологического оборудования, непосредственное воздействие на технологический процесс в целях управления им, регулирование и стабилизация технологических переменных, контроль и регистрация технологических переменных процесса и состояния оборудования.
Результатом разработки функциональных схем систем автоматизации является:
Выбор приводов исполнительных механизмов рабочих машин, управляемых непосредственно или дистанционно;
Выбор основных технических средств автоматизации (ТСА); выбор методов измерения технологических переменных; размещение ТСА на щитах, пультах, технологическом оборудовании. При разработке необходимо учитывать следующие требования: сохранение возможности наращивания функций управления (соблюдение принципа открытости системы);
Построение системы на базе типовых унифицированных средств, обеспечивающее значительные преимущества при ее монтаже, наладке, эксплуатации и ремонте;
Выбор ТСА исходя из условий производства (пожаро - и взрывобезопас - ность, запыленность, агрессивность и токсичность среды), значений и диапазона измеряемых переменных, допустимых расстояний от датчиков и исполнительных механизмов до регулирующих устройств, требуемых точности и быстродействия системы.
Изображение средств измерения и автоматизации на функциональных схемах производится в соответствии с ГОСТ 21.404—85 условными буквенными
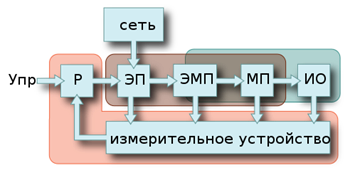
Функциональные элементы:
· Регулятор (Р) предназначен для управления процессами, протекающими в электроприводе.
· Электрический преобразователь (ЭП) предназначен для преобразования электрической энергии сети в регулируемое напряжение постоянного или переменного тока.
· Электромеханический преобразователь (ЭМП) — двигатель, предназначен для преобразования электрической энергии в механическую.
· Механический преобразователь (МП) может изменять скорость вращения двигателя, а также характер движения (с поступательного на вращательное или с вращательного напоступательное).
· Упр — управляющее воздействие.
· ИО — исполнительный орган.
Функциональные части:
· Силовая часть или электропривод с разомкнутой системой регулирования.
· Механическая часть.
· Система управления электропривода.
Вопрос 4
Классификация электроприводов
Классификация электроприводов обычно производится по виду движения и управляемости, роду электрического и механического передаточных устройств, способу передачи механической энергии исполнительным органам.
По виду движения различаются электроприводы вращательного и поступательного однонаправленного и реверсивного движения, а также электроприводы возвратно-поступательного движения.
По принципу регулирования скорости и положения исполнительного органа электропривод может быть:
· нерегулируемый и регулируемый по скорости;
· следящий (с помощью электропривода воспроизводится перемещение исполнительного органа в соответствии с произвольно изменяющимся задающим сигналом);
· программно-управляемый (электропривод обеспечивает перемещение исполнительного органа в соответствии с заданной программой);
· адаптивный (электропривод автоматически обеспечивает оптимальный режим движения исполнительного органа при изменении условий его работы);
· позиционный (электропривод обеспечивает регулирование положения исполнительного органа рабочей машины).
По роду механического передаточного устройства различают редукторный электропривод, содержащий один из видов механического передаточного устройства, и безредукторный, в котором электродвигатель непосредственно соединен с исполнительным органом.
По роду электрического преобразовательного устройства различают:
· вентильный электропривод, преобразовательным устройством в котором является тиристорный или транзисторный преобразователь электроэнергии;
· система управляемый выпрямитель-двигатель (УВ-Д)– вентильный электропривод постоянного тока, преобразовательным устройством которого является регулируемый выпрямитель напряжения;
· система преобразователь частоты – двигатель (ПЧ-Д) – вентильный электропривод переменного тока, преобразовательным устройством которого является регулируемый преобразователь частоты;
· система генератор-двигатель (Г-Д) и магнитный усилитель-двигатель (МУ-Д) – регулируемый электропривод, преобразовательным устройством которого является соответственно электромашинный преобразовательный агрегат или магнитный усилитель.
По способу передачи механической энергии исполнительному органу электроприводы делятся на групповые, индивидуальные и взаимосвязанные.
Групповой электропривод характеризуется тем, что от одного двигателя приводится в движение через трансмиссию несколько исполнительных органов одной или нескольких рабочих машин.
Кинематическая цепь в таком приводе сложна и громоздка, а сам электропривод является неэкономичным, усложняется его эксплуатация и автоматизация технологических процессов. Вследствие этого трансмиссионный электропривод в настоящее время почти не применяется, он уступил место индивидуальному и взаимосвязанному.
Индивидуальный электропривод характеризуется тем, что каждый исполнительный орган рабочей машины приводится в движение своим отдельным двигателем. Этот вид привода в настоящее время является основным, так как при индивидуальном электроприводе упрощается кинематическая передача (в некоторых случаях она полностью исключена) от двигателя к исполнительному органу, легко осуществляется автоматизация технологического процесса, улучшаются условия обслуживания рабочей машины.
Индивидуальный электропривод широко применяется в различных современных машинах, например: в сложных металлорежущих станках, прокатных станах металлургического производства, подъемно-транспортных машинах, роботах-манипуляторах и т.п.
Взаимосвязанный электропривод(многодвигательный привод) содержит два или несколько электрически или механически связанных между собой индивидуальных электроприводов, при работе которых поддерживается заданное соотношение или равенство скоростей, или нагрузок, или положение исполнительных органов рабочих машин.
Необходимость в таком приводе возникает по конструктивным или технологическим соображениям. Примером многодвигательного взаимосвязанного электропривода с механическим валом может служить привод длинного ленточного или цепного конвейера, привод платформы механизма поворота мощного экскаватора, привод общей шестерни мощного винтового пресса.
В том случае, когда во взаимосвязанном электроприводе возникает необходимость постоянства соотношения скоростей рабочих органов, не имеющих механических связей, или когда осуществление механических связей затруднено, используется специальная схема электрической связи двух или нескольких электродвигателей, называемая схемой электрического вала.
Примером такого привода может служить привод сложного металлообрабатывающего станка, электропривод шлюзов и разводных мостов и т.д. Взаимосвязанный электропривод широко применяется в бумагоделательных машинах, текстильных агрегатах, прокатных станах металлургического производства и т.д.
По уровню автоматизации электроприводы можно разделить на неавтоматизированные, автоматизированные и автоматические. Два последних типа электроприводов находят применение в подавляющем большинстве случаев.
Вопрос 5
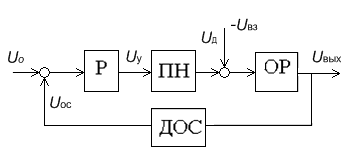
Рассмотрим обобщенную функциональную схему автоматизированного электропривода рис. 7.1, где обозначено: Р – регулятор; ПН – преобразователь напряжения; ОР – объект регулирования; ДОС – датчик обратной связи. На вход системы поступает сигнал управления U0, который задает значение выходной координаты и может быть представлен в аналоговой, импульсной или цифровой форме. На объект регулирования воздействует возмущающее воздействие Uвз в виде изменения: частоты, или напряжения первичного источника питания привода, или статического момента нагрузки. Преобразователь может быть любым из рассмотренных выше типов: электромеханический, тиристорный или импульсный. Объект регулирования чаще всего включает двигатель совместно с исполнительным органом привода, поэтому может описываться различными передаточными функциями. В качестве датчика обратной связи может быть использован аналоговый или частотный датчик скорости или угла с передаточным коэффициентом kос. Разность сигналов заданного U0 и пропорционального фактическому значению выходной координаты приводаUос поступает на регулятор, который в соответствии со своей передаточной функцией формирует сигнал управления преобразователем напряженияUу, который в свою очередь управляет двигателем Uд так, чтобы свести эту разность к нулю или по возможности уменьшить ее.
Рис. 7.1. Функциональная схема автоматизированного электропривода (САР скорости, момента или положения)
Для того чтобы исследовать такую систему необходимо иметь систему дифференциальных уравнений, характеризующих зависимости координат от внешних воздействий и друг от друга. В общем случае эти уравнения могут быть нелинейными, т.е. их коэффициенты могут зависеть от времени или значений координат. Последнее, как было показано при описании динамических характеристик электродвигателей, часто встречается в электроприводе. Там же было показано, что некоторые координаты привода могут являться функцией произведения внешних воздействий и переменных, и приведена методика линеаризации математического описания систем в режиме малых отклонений в интересующей нас точке или в точке установившегося режима. В дальнейшем, если нет дополнительной оговорки, речь будет идти о линейных или линеаризованных системах.
Предположим, что объект регулирования представляет собой двигатель постоянного тока независимого возбуждения, питающийся от идеального источника тока, к валу которого приведена некоторая инерционная нагрузка, т.е. представляет собой интегрирующее звено с постоянной времени Tо. Коэффициенты передачи объекта по управлению и по возмущению соответственно обозначены
kо=Uвых/Uдв, kвз=Uвых/Uвз.
Из уравнения момента (2.6) и уравнения движения (1.18), принимая Uвых=ω, Uвз=Mс, Uдв=Iя нетрудно показать, что Tо=J, kо=KΦ, kвз=1.
Пусть преобразователь напряжения, который, как отмечалось, является идеальным источником тока, описывается апериодическим звеном с коэффициентом передачи kп и постоянной времени Tμ, являющейся малой по сравнению с постоянной времени объекта, а регулятор является безынерционным усилителем с передаточным коэффициентом kр.
В соответствии с приведенным описанием работы и принятыми уравнениям отдельных элементов, привод может быть описан следующей системой уравнений:
6.Назначение и основные механические узлы электропривода, передача движения от электропривода к исполнительному органу рабочей машины.
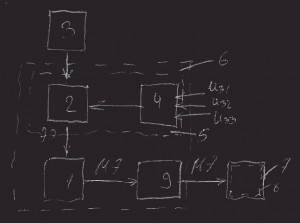
Основной задачей электропривода является приведение в движение рабочего органа производственного механизма по определенному закону. Закон изменения параметров электрического привода зависит от технологического процесса, выполняемого производственным механизмом, для которого данный электрический привод используется. Электропривод включает в себя определенные взаимосвязанные и взаимодействующие друг с другом электрические, механические и электромеханические устройства.
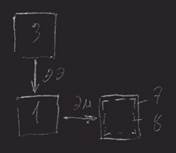
Основным элементом электрического привода 6 является электрический двигатель 1, который является электромеханическим преобразователем поступающей от источника питания 3 электрической энергии (ЭЭ) в механическую энергию (МЭ), приводящую в движение рабочий орган 8 производственного механизма 7.
Основной задачей электрического двигателя 1 является преобразование электрической энергии в механическую, однако, электрический двигатель в системе электрического привода может производить и обратное преобразование механической энергии, запасенной в рабочем органе производственного механизма, в электрическую энергию. Такой режим работы электрического привода называется тормозным.
От электродвигателя механическая энергия передается рабочему органу 8 производственного механизма 7 через передачу 9. Передача 9 может быть механической, гидравлической или электромагнитной.
За счет механической энергии, передаваемой от двигателя 1 через передачу 9, рабочему органу 8 сообщается механическое движение. В задачу передачи 9 входит согласование параметров движения электрического двигателя и производственного механизма.
Существует много электрических приводов, у которых электродвигатель соединяется без передачи с рабочим органом производственного механизма, то есть осуществляется, так называемая, непосредственная передача. Электроприводы с непосредственной связью между двигателем и производственным механизмом экономически более выгодны и более надежны в работе. Отсюда можно сделать вывод, что механическая передача не является обязательным элементом электрического привода.
Электроэнергия поступает от источника питания 3 на электродвигатель через преобразователь 2, который используется для согласования параметров сети с параметрами электродвигателя и для управления потоком электроэнергии. Управление потоком электрической энергии осуществляется с помощью системы управления преобразователем 4. Силовой блок преобразователя 2 и блок управления 4 объединены в единое преобразующее устройство 5. Во многих электрических приводах электроэнергия от источника питания поступает напрямую на электродвигатель. Отсюда следует, что преобразователь 5 может отсутствовать в системе электропривода и является необязательным элементом электрического привода.
Блок-схема основных элементов электрического привода, без которых он не может работать.
Классификация электроприводов обычно производится по виду движения и управляемости, роду электрического и механического передаточных устройств, способу передачи механической энергии исполнительным органам.
По виду движения различаются электроприводы вращательного и поступательного однонаправленного и реверсивного движения, а также электроприводы возвратно-поступательного движения.
По принципу регулирования скорости и положения исполнительного органа электропривод может быть:
нерегулируемый и регулируемый по скорости;
следящий (с помощью электропривода воспроизводится перемещение исполнительного органа в соответствии с произвольно изменяющимся задающим сигналом);
программно-управляемый (электропривод обеспечивает перемещение исполнительного органа в соответствии с заданной программой);
адаптивный (электропривод автоматически обеспечивает оптимальный режим движения исполнительного органа при изменении условий его работы);
позиционный (электропривод обеспечивает регулирование положения исполнительного органа рабочей машины).
По роду механического передаточного устройства различают редукторный электропривод, содержащий один из видов механического передаточного устройства, и безредукторный, в котором электродвигатель непосредственно соединен с исполнительным органом.
По роду электрического преобразовательного устройства различают:
вентильный электропривод, преобразовательным устройством в котором является тиристорный или транзисторный преобразователь электроэнергии;
система управляемый выпрямитель-двигатель (УВ-Д)– вентильный электропривод постоянного тока, преобразовательным устройством которого является регулируемый выпрямитель напряжения;
система преобразователь частоты – двигатель (ПЧ-Д) – вентильный электропривод переменного тока, преобразовательным устройством которого является регулируемый преобразователь частоты;
система генератор-двигатель (Г-Д) и магнитный усилитель-двигатель (МУ-Д) – регулируемый электропривод, преобразовательным устройством которого является соответственно электромашинный преобразовательный агрегат или магнитный усилитель.
По способу передачи механической энергии исполнительному органу электроприводы делятся на групповые, индивидуальные и взаимосвязанные.
Групповой электропривод характеризуется тем, что от одного двигателя приводится в движение через трансмиссию несколько исполнительных органов одной или нескольких рабочих машин.
Кинематическая цепь в таком приводе сложна и громоздка, а сам электропривод является неэкономичным, усложняется его эксплуатация и автоматизация технологических процессов. Вследствие этого трансмиссионный электропривод в настоящее время почти не применяется, он уступил место индивидуальному и взаимосвязанному.
Индивидуальный электропривод характеризуется тем, что каждый исполнительный орган рабочей машины приводится в движение своим отдельным двигателем. Этот вид привода в настоящее время является основным, так как при индивидуальном электроприводе упрощается кинематическая передача (в некоторых случаях она полностью исключена) от двигателя к исполнительному органу, легко осуществляется автоматизация технологического процесса, улучшаются условия обслуживания рабочей машины.
Индивидуальный электропривод широко применяется в различных современных машинах, например: в сложных металлорежущих станках, прокатных станах металлургического производства, подъемно-транспортных машинах, роботах-манипуляторах и т.п.
Взаимосвязанный электропривод содержит два или несколько электрически или механически связанных между собой индивидуальных электроприводов, при работе которых поддерживается заданное соотношение или равенство скоростей, или нагрузок, или положение исполнительных органов рабочих машин.
Необходимость в таком приводе возникает по конструктивным или технологическим соображениям. Примером многодвигательного взаимосвязанного электропривода с механическим валом может служить привод длинного ленточного или цепного конвейера, привод платформы механизма поворота мощного экскаватора, привод общей шестерни мощного винтового пресса.
В том случае, когда во взаимосвязанном электроприводе возникает необходимость постоянства соотношения скоростей рабочих органов, не имеющих механических связей, или когда осуществление механических связей затруднено, используется специальная схема электрической связи двух или нескольких электродвигателей, называемая схемой электрического вала.
Примером такого привода может служить привод сложного металлообрабатывающего станка, электропривод шлюзов и разводных мостов и т.д. Взаимосвязанный электропривод широко применяется в бумагоделательных машинах, текстильных агрегатах, прокатных станах металлургического производства и т.д.
7.Реактивные и активные моменты в механической части электропривода
Кроме электромагнитного момента на механическую часть электропривода действуют статические нагрузки, которые делятся на силы и моменты механических потерь и силы и моменты полезных нагрузок исполнительных механизмов:
(2.9)
где первая составляющая суммы является суммарными потерями в двигателе и в исполнительном механизме, а вторая – суммарным приведённым моментом полезной нагрузки.
По характеру взаимодействия с электроприводом различаются активные и реактивные силы и моменты.
Активными силами и моментами называются силы и моменты, величина и направление которых не зависит от движения электропривода; например, силы и моменты, создаваемые перемещаемым по вертикали грузом. Механическая характеристика такого вида статической активной нагрузки изображена на рис. 2.5.
В зависимости от соотношения масс и двигатель работает в тормозном ( ) или двигательном ( ) режимах.
Силы и моменты, возникающие как реакции на движение электропривода, называются реактивными. Направление их всегда противоположно направлению движению электропривода. По характеру зависимости от скорости реактивных сил и моментов различают нагрузки типов сухого трения (рис. 2.6):
a) б)
Рис. 2.6. Реактивные нагрузки: сухое трение (а) и момент резания (б).
В момент трогания силы сухого трения могут превышать свои значения при движении (рис. 2.6а).
Силы и моменты вязкого трения зависят от скорости линейно (рис. 2.7):
(2.10)
Рис. 2.7. Момент нагрузки типа вязкого трения.
Момент внутреннего вязкого трения:
(2.11)
где
и – скорости на входе и выходе деформируемого элемента.
8.Основные виды механических характеристик производственных механизмов
При выборе электрического двигателя, приводящего в действие производственный механизм, необходимо соответствие механических свойств характеристикам производственного механизма.
Каждый производственный механизм в зависимости от технологического процесса имеет свою механическую характеристику. Механической характеристикой производственного механизма называется зависимость скорости вращения ωс от момента сопротивления производственного механизма Mс. Так как производственные механизмы обладают большим разнообразием характеристик. Чтобы как-то их классифицировать, используется эмпирическая формула:
Mс = M0 + (Mвр – Mсн)(ω/ωн)x
Mс – момент сопротивления производственного механизма при скорости ω. M0 – момент трения в движущихся частях производственного механизма. Mсн – момент сопротивления при номинальной скорости вращения ωн. x – показатель степени, характеризующий изменение момента сопротивления при изменении скорости.
1. При x=0 момент сопротивления не зависит от скорости вращения ω и механическая характеристика будет представлять собой прямую линию, параллельную оси скорости. 2. x=1 – линейно возрастающая характеристика. с увеличением сопротивления увеличивается и скорость вращения производственного механизма. 3. x=2 – характеристика не линейно возрастающая. Момент сопротивления будет зависеть от квадрата скорости. 4. x=-1 – характеристика нелинейно убывающая. Момент сопротивления Mс обратно пропорционален скорости, но при этом мощность будет оставаться постоянной.
Характеристика первого типа относится к таким производственным механизмам, как поршневые насосы, механизмы подачи станков, электрические приводы конвейеров.
Характеристики второго типа обычно бывают у механизмов подъема кранов.
Характеристиками третьего типа обладают вентиляторы, центробежные насосы, компрессоры.
Характеристику четвертого типа имеют приводы шпинделей и планшайб.
Электрические двигатели делятся на различные виды по жесткости характеристик:
1. Абсолютно жесткая характеристика, у которой скорость вращения не зависит от нагрузки. Жесткостью называется отношение приращения момента к приращению скорости.
β = ΔM / Δω
2. Жесткая характеристика. Наклон этой характеристики относительно максимальной скорости зависит от параметров двигателя. Характеристику этого типа имеет двигатель постоянного тока (ДПТ) и асинхронный двигатель на рабочей части механической характеристики.
3. Мягкая характеристика. Данная механическая характеристика отличается резким снижением скорости при увеличении нагрузки. Характеристика этого типа будет у двигателей постоянного тока независимого и смешанного возбуждения.
9.Механизмы с независящим от скорости моментом сопротивления Мс(омега)=const.
При рассмотрении работы электродвигателя, приводящего в действие производственный механизм, необходимо, прежде всего, выявить соответствие механических характеристик двигателя характеристике производственного механизма. Поэтому для правильного проектирования и экономичной эксплуатации электропривода необходимо изучить эти характеристики
Моменты сопротивления механизмов можно разделить на две категории, а именно:
1) реактивные моменты – моменты сопротивления от сжатия, резания, моменты трения и т. п., препятствующие движению привода в любом направлении и изменяющие свои знак при изменении направления вращения.
2)активныеили потенциальные моменты – моменты от силы тяжести, а также от растяжения, сжатия и скручивания упругих тел. Эти моменты могут быть названы потенциальными, поскольку они связаны с изменением потенциальной энергии отдельных элементов привода. Потенциальные моменты могут тормозить движение привода или, наоборот, способствовать его движению. Следует отметить, что, в отличие от реактивного статического момента, активный момент сохраняет свой знак при изменении направления вращения привода. Например, момент, создаваемый грузом подъемного механизма, сохраняет свой знак как при подъеме его, так и при опускании. Следовательно, в данном случае активный статический момент при подъеме препятствует движению, а при опускании способствует ему.
Зависимость между приведенными к валу двигателя скоростью и моментом сопротивления механизма w = f (Mc) называют статической механической характеристикой производственногомеханизма.
Различные производственные механизмы обладают различными механическими характеристиками. Однако можно получить некоторые обобщающие выводы, если воспользоваться следующей эмпирической формулой для механической характеристики производственного механизма:
, (3.1)
где Мс – момент сопротивления производственного механизма при скорости w; М0 – момент сопротивления трения в движущихся частях механизма; Мсн – момент сопротивления при номинальной скорости ωн; х – показатель степени, характеризующий изменение момента сопротивления при изменении скорости.
Приведенная формула позволяет классифицировать механические характеристики производственных механизмов ориентировочно на следующие основные группы.
1. Не зависящая от скорости механическая характеристика (прямая 1 на рис. 3.1)[2]. При этом х = 0 и момент сопротивления Мс не зависит от скорости. Такой характеристикой обладают, например, подъемные краны, лебёдки, механизмы подач металлорежущих станков, поршневые насосы при неизменной высоте подачи, конвейеры с постоянной массой передвигаемого материала.
10.Механизмы с линейно-возрастающей механической характеристикой.


 Классификация электроприводов обычно производится по виду движения и управляемости, роду электрического и механического передаточных устройств, способу передачи механической энергии исполнительным органам.
По виду движения различаются электроприводы вращательного и поступательного однонаправленного и реверсивного движения, а также электроприводы возвратно-поступательного движения.
По принципу регулирования скорости и положения исполнительного органа электропривод может быть:
Классификация электроприводов обычно производится по виду движения и управляемости, роду электрического и механического передаточных устройств, способу передачи механической энергии исполнительным органам.
По виду движения различаются электроприводы вращательного и поступательного однонаправленного и реверсивного движения, а также электроприводы возвратно-поступательного движения.
По принципу регулирования скорости и положения исполнительного органа электропривод может быть:
 По роду механического передаточного устройства различают редукторный электропривод, содержащий один из видов механического передаточного устройства, и безредукторный, в котором электродвигатель непосредственно соединен с исполнительным органом.
По роду электрического преобразовательного устройства различают:
По роду механического передаточного устройства различают редукторный электропривод, содержащий один из видов механического передаточного устройства, и безредукторный, в котором электродвигатель непосредственно соединен с исполнительным органом.
По роду электрического преобразовательного устройства различают:
 Групповой электропривод характеризуется тем, что от одного двигателя приводится в движение через трансмиссию несколько исполнительных органов одной или нескольких рабочих машин.
Кинематическая цепь в таком приводе сложна и громоздка, а сам электропривод является неэкономичным, усложняется его эксплуатация и автоматизация технологических процессов. Вследствие этого трансмиссионный электропривод в настоящее время почти не применяется, он уступил место индивидуальному и взаимосвязанному.
Индивидуальный электропривод характеризуется тем, что каждый исполнительный орган рабочей машины приводится в движение своим отдельным двигателем. Этот вид привода в настоящее время является основным, так как при индивидуальном электроприводе упрощается кинематическая передача (в некоторых случаях она полностью исключена) от двигателя к исполнительному органу, легко осуществляется автоматизация технологического процесса, улучшаются условия обслуживания рабочей машины.
Групповой электропривод характеризуется тем, что от одного двигателя приводится в движение через трансмиссию несколько исполнительных органов одной или нескольких рабочих машин.
Кинематическая цепь в таком приводе сложна и громоздка, а сам электропривод является неэкономичным, усложняется его эксплуатация и автоматизация технологических процессов. Вследствие этого трансмиссионный электропривод в настоящее время почти не применяется, он уступил место индивидуальному и взаимосвязанному.
Индивидуальный электропривод характеризуется тем, что каждый исполнительный орган рабочей машины приводится в движение своим отдельным двигателем. Этот вид привода в настоящее время является основным, так как при индивидуальном электроприводе упрощается кинематическая передача (в некоторых случаях она полностью исключена) от двигателя к исполнительному органу, легко осуществляется автоматизация технологического процесса, улучшаются условия обслуживания рабочей машины.
 Индивидуальный электропривод широко применяется в различных современных машинах, например: в сложных металлорежущих станках, прокатных станах металлургического производства, подъемно-транспортных машинах, роботах-манипуляторах и т.п.
Взаимосвязанный электропривод содержит два или несколько электрически или механически связанных между собой индивидуальных электроприводов, при работе которых поддерживается заданное соотношение или равенство скоростей, или нагрузок, или положение исполнительных органов рабочих машин.
Необходимость в таком приводе возникает по конструктивным или технологическим соображениям. Примером многодвигательного взаимосвязанного электропривода с механическим валом может служить привод длинного ленточного или цепного конвейера, привод платформы механизма поворота мощного экскаватора, привод общей шестерни мощного винтового пресса.
Индивидуальный электропривод широко применяется в различных современных машинах, например: в сложных металлорежущих станках, прокатных станах металлургического производства, подъемно-транспортных машинах, роботах-манипуляторах и т.п.
Взаимосвязанный электропривод содержит два или несколько электрически или механически связанных между собой индивидуальных электроприводов, при работе которых поддерживается заданное соотношение или равенство скоростей, или нагрузок, или положение исполнительных органов рабочих машин.
Необходимость в таком приводе возникает по конструктивным или технологическим соображениям. Примером многодвигательного взаимосвязанного электропривода с механическим валом может служить привод длинного ленточного или цепного конвейера, привод платформы механизма поворота мощного экскаватора, привод общей шестерни мощного винтового пресса.
 В том случае, когда во взаимосвязанном электроприводе возникает необходимость постоянства соотношения скоростей рабочих органов, не имеющих механических связей, или когда осуществление механических связей затруднено, используется специальная схема электрической связи двух или нескольких электродвигателей, называемая схемой электрического вала.
Примером такого привода может служить привод сложного металлообрабатывающего станка, электропривод шлюзов и разводных мостов и т.д. Взаимосвязанный электропривод широко применяется в бумагоделательных машинах, текстильных агрегатах, прокатных станах металлургического производства и т.д.
В том случае, когда во взаимосвязанном электроприводе возникает необходимость постоянства соотношения скоростей рабочих органов, не имеющих механических связей, или когда осуществление механических связей затруднено, используется специальная схема электрической связи двух или нескольких электродвигателей, называемая схемой электрического вала.
Примером такого привода может служить привод сложного металлообрабатывающего станка, электропривод шлюзов и разводных мостов и т.д. Взаимосвязанный электропривод широко применяется в бумагоделательных машинах, текстильных агрегатах, прокатных станах металлургического производства и т.д.
 (2.9)
(2.9)


 и
и  двигатель работает в тормозном (
двигатель работает в тормозном (  ) или двигательном (
) или двигательном (  ) режимах.
) режимах.


 (2.10)
(2.10)
 (2.11)
(2.11) и
и  – скорости на входе и выходе деформируемого элемента.
– скорости на входе и выходе деформируемого элемента.
 , (3.1)
, (3.1)