| 1 Какой из методов кинематического анализа даёт наибольшую точность?
|
| Графический;
Аналитический;
Графо – аналитический;
Экспериментальный.
|
| 2 Векторы каких скоростей (ускорений) исходят из полюса плана скоростей (ускорений)?
|
| Абсолютных скоростей;
Относительных скоростей;
Абсолютных ускорений;
Относительных ускорений.
|
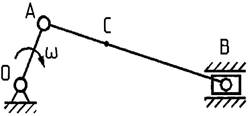
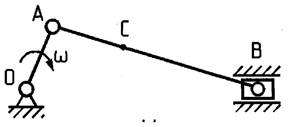
| 3 Как направлен вектор скорости точки А кривошипа ОА при известном направлении его вращения?
|
| Параллельно звену ОА к центру вращения;
Перпендикулярно к звену ОА в сторону его вращения;
Параллельно звену ОА в сторону от центра вращения;
Перпендикулярно к звену ОА в сторону, противоположную его вращению.
|
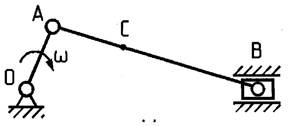
| 4 Как направлено ускорение точки А кривошипа ОА, если его угловая скорость постоянна?
|
| Параллельно звену ОА к центру вращения;
Перпендикулярно к звену ОА в сторону его вращения;
Параллельно звену ОА в сторону от центра вращения;
Перпендикулярно к звену ОА в сторону, противоположную его вращению.
|
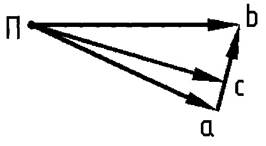
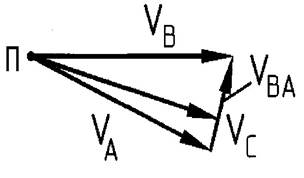
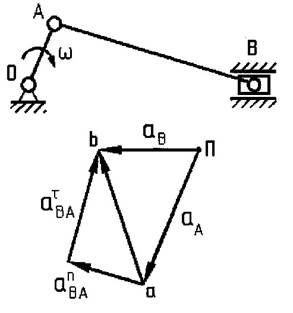
5 Какой вектор на плане скоростей изображает относительную скорость звена АВ?
|
| Вектор Па;
Вектор Пb;
Вектор Пс;
Вектор ab.
|
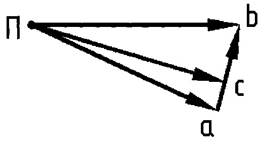
6 Какой вектор на плане скоростей изображает скорость точки С звена АВ?
|
| Вектор Па;
Вектор Пb;
Вектор Пс;
Вектор ab.
|
7 С помощью какой скорости можно определить угловую скорость звена АВ?
|
| Скорость точки А;
Скорость точки В;
Скорость точки С;
Относительная скорость звена АВ.
|
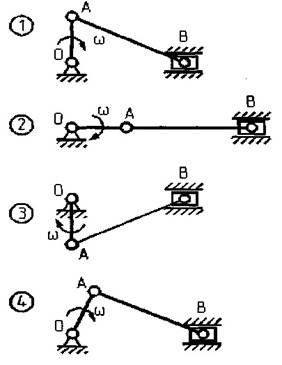
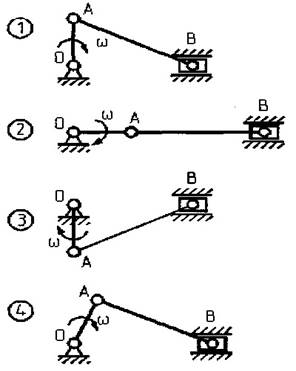
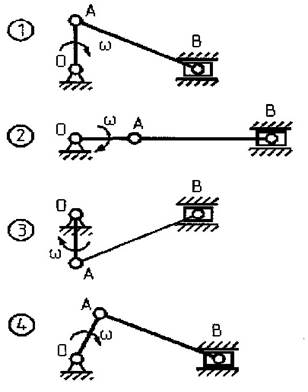
8 Для какого положения механизма скорость точки А равна скорости точки В?
|
| Положение 1;
Положение 2;
Положение 3;
Положение 4.
|
9 Для какого положения механизма скорость точки В равна нулю?
|
| Положение 1;
Положение 2;
Положение 3;
Положение 4.
|
| 10 Для какого положения механизма скорость точки А равна относительной скорости звена АВ?
|
| Положение 1;
Положение 2;
Положение 3;
Положение 4.
|
| 11 Для какого положения механизма относительная скорость звена АВ равна нулю?
|
| Положение 1;
Положение 2;
Положение 3;
Положение 4.
|
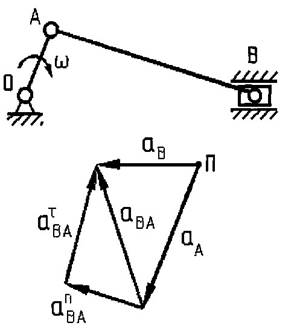
12 С помощью какого ускорения можно определить угловое ускорение звена АВ?
|
| Ускорение точки А;
Нормальная составляющая относительного ускорения звена АВ;
Тангенциальная составляющая относительного ускорения звена АВ;
Ускорение точки В.
|
13 Направлением какого ускорения определяется направление углового ускорения звена АВ?
|
|
Нормальной составляющей относительного ускорения звена АВ;
Тангенциальной составляющей относительного ускорения звена АВ;
Полного относительного ускорения звена АВ;
Ускорения точки В.
|
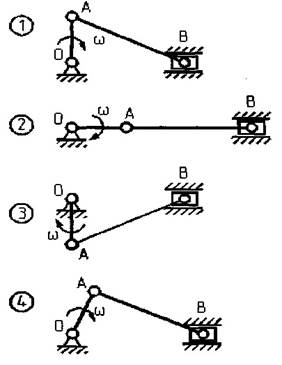
14 Для какого положения механизма угловая скорость звена АВ равна нулю?
|
| Положение 1;
Положение 2;
Положение 3;
Положение 4.
|
15 Для какого положения механизма угловое ускорение звена АВ равна нулю?
|
| Положение 1;
Положение 2;
Положение 3;
Положение 4.
|
| 16 Угловая скорость кривошипа рычажного механизма постоянна. Угловое ускорение какого звена этого механизма будет равно нулю?
|
| Шатуна;
Коромысла;
Кривошипа;
Ползуна.
|
| 17 Для какого звена необходимо определять ускорение Кориолиса?
|
| Звена, совершающего вращательное движение;
Звена, совершающего поступательное движение;
Звена, совершающего сложное движение;
Звена, совершающего плоскопараллельное движение.
|
| 18 Какое положение является крайним ("мертвым") для центрального кривошипно-шатунного механизма?
|
| Положение, в котором скорость ползуна является максимальной;
Положение, в котором скорость ползуна является минимальной;
Положение, в котором скорость ползуна равна нулю;
• Положение, в котором скорость ползуна является средней между максимальной и минимальной.
|
| 19 Что не входит в задачи кинематического анализа механизмов?
|
| Определение положений звеньев и траекторий точек;
Определение линейных скоростей и ускорений точек;
Определение угловых скоростей и ускорений звеньев;
Определение размеров звеньев механизма.
|
| 20 Рычажный механизм состоит из группы начального звена и трех групп Ассура. С какой группы следует начинать кинематический расчет этого механизма?
|
| С группы начального звена;
С группы Ассура, соединенной с группой начального звена;
С группы Ассура, наиболее удаленной от группы начального звена;
Порядок расчета не имеет значения.
|
| 21 Какие параметры подлежат определению при кинематическом расчете группы Ассура с тремя вращательными парами аналитическим методом?
|
| Координаты внешних кинематических пар;
Координаты внутренней кинематической пары;
Длины звеньев группы;
Угловые положения звеньев.
|
| 22 Чем определяется показатель сборки при кинематическом расчете группы Ассура с тремя вращательными парами аналитическим методом?
|
| Знаком момента вектора группы относительно внутренней кинематической пары;
Знаком углов поворота звеньев;
Направлением вектора группы;
Знаком угла, определяющего угловое положение вектора группы.
|
| 23 Какие параметры подлежат определению при кинематическом расчете группы Ассура с двумя вращательными и внешней поступательной парами аналитическим методом?
|
| Расстояние от начала координат до направляющей;
Координаты ползуна;
Координаты внешней; вращательной пары
Угловое положение шатуна.
|
| 24 Чем определяется показатель сборки при кинематическом расчете группы Ассура с двумя вращательными и внешней поступательной парами аналитическим методом?
|
| Знаком угла поворота оси Y до совмещения ее с единичным вектором n;
Знаком косинуса угла между осью X' правой системы координат и вектором группы;
Знаком угла, определяющего угловое положение шатуна;
Знаком расстояния от начала координат до направляющей.
|
| 25 Чем определяется направление осей X' и Y' правой системы координат при кинематическом расчете группы Ассура с двумя вращательными и внешней поступательной парами аналитическим методом?
|
| Оси X' и Y' сонаправлены с единичными векторами tиn;
Оси X' и Y' сонаправлены с осями координат X и Y;
Ось X' сонаправлена с единичным вектором n;
Ось Y' сонаправлена с единичным вектором t.
|
