Естественная механическая характеристика асинхронного двигателя имеет два участка – нерабочий (разгонный) АВ и рабочий ВСD (рис. 8.8).
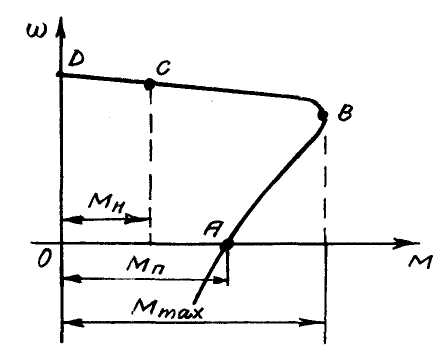
Рис. 10.5 Естественная механическая характеристика асинхронного двигателя
При пуске двигатель развивает пусковой момент 
 (отрезок ОА), после чего разгоняется по траектории АВС до точки С. При этом на участке АВ одновременно увеличиваются как скорость, так и момент, в точке В двигатель развивает максимальный момент
(отрезок ОА), после чего разгоняется по траектории АВС до точки С. При этом на участке АВ одновременно увеличиваются как скорость, так и момент, в точке В двигатель развивает максимальный момент  . На участке ВС скорость продолжает увеличиваться, а момент уменьшается, до номинального (точка С). На участке BC двигатель перегружен, т.к. в любой точке этого участка электромагнитный момент двигателя больше номинального ( > >
. На участке ВС скорость продолжает увеличиваться, а момент уменьшается, до номинального (точка С). На участке BC двигатель перегружен, т.к. в любой точке этого участка электромагнитный момент двигателя больше номинального ( > >  ).
).
В нормальних условиях двигатель работает на участке СD, жесткость которого
β = Δ / Δω < 10%.
Это означает, что при изменении момента в широких пределах скорость двигателя изменяется незначительно.
Асинхронные двигатели нашли самое широкое применение на судах с электростанцией на переменном токе.
Промышленность выпускает специально для судов асинхронные двигатели разных серий, например, 4А…ОМ2 (четвертая серия асинхронных двигателей), МАП (морской асинхронный полюсопереключаемый), МТF (c фазным ротором) и др.
При этом двигатели серии 4А – односкоростные, серии МАП – двух- и трехскоростные, серии МТF – число скоростей определяется схемой управления ( до 5 скоростей ).
