Зависимости или () называются механическими характеристиками.
Механические характеристики исполнительных механизмов – это зависимости между приведенными к валу двигателя скоростью и статическим моментом (моментом сопротивления) механизма.
Для правильного проектирования и экономичной эксплуатации электропиривода необходимо соответствие механических характеристик двигателя и характеристик исполнительных механизмов.
В отличие от двигателей значение статического момента (момента сопротивления) механизма часто зависит от скорости рабочего органа. И механические характеристики исполнительных механизмов в технической документации представляют (4-4) функцией статического момента – от угловой скорости – ω, т.е
= f(ω). (4-4)
Но для удобства совместного рассмотрения механических характеристик электродвигателя и механизма, характеристику исполнительного механизма изображают как функцию скорости , приведенной к валу двигателя от статического момента механизма, т.е
. (4-5)
Рабочие механизмы создают статические моменты .
Для любого электродвигателя входной величиной является статический момент механизма, а выходной – его скорость, то есть скорость двигателя является функцией момента ω().
Для механизмов, наоборот, входной величиной является скорость ω, а выходной статический момент механизма , статический момент механизма является функцией скорости (ω).
Это означает, что при любом изменении скорости механизма или скорости двигателя будет изменяться статический момент (момент сопротивления) механизма .
Рассмотрим типичные зависимости статического момента сопротивления от угловой скорости.
Различают два основных вида механических характеристик судовых исполнительных механизмов:
1. Крановые, когда при изменении скорости в широких пределах статический момент не изменяется ( рис. 4.1а, характеристика 1 ).
Такая характеристика описывается уравнением
(ω) = сonst (4- 6 )
т.е. статический момент механизма не зависит от ω скорости дигателя.
2. Вентиляторные, у которых статический момент механизма пропорционален квадрату скорости ( рис. 4.1а, характеристика 2 ).
Такая характеристика описывается уравнением
= + Δ , (4- 7 )
где – момент холостого хода, без нагрузки на валу дигателя ;
Δ = сω – момент, создаваемый рабочим органом механизма при выполнении полезной работы (с – постоянный коэффициент, ω – угловая скорость вала механизма).
Рис. 4.1. Механические характеристики механизмов с крановыми характеристиками 1 и вентиляторными 2: а – в системе координат (ω) момент функция скорости ; б – преобразованные в системе координат скорость функция момента ω( ).
Крановые характеристики имеют механизмы грузовых кранов, лебедок, брашпилей, т.е. механизмов, работа которых связана с преодолением действия силы тяжести. Статический момент крановых механизмов определяется следующим выражением
= GD/2 = const, ( 4-8 )
где G – вес груза (у брашпилей – вес якоря с цепью);
Вентиляторные характеристики имеют: центробежные насосы вентиляторы, гребные винты, компрессоры и другие механизмы, для которых сопротивление технологической среды (вода, масло, газы) зависит от квадрата скорости рабочего органа (крыльчатка, лопости и тд.).
У механизмов с вентиляторными характеристиками условия пуска – легкие, т.к. при пуске на валу механизма действует небольшой момент холостого хода , создаваемый только силами трения в элементах привода, а момент, создаваемый трением о среду равен нулю сω = 0при пуске так как .
Однако при увеличении угловой скорости – трение лопастей о воздух, воду или другую среду увеличивается и по мере разгона статический момент механизма резко увеличивается за счет того, что к моменту холостого хода , добавляется тормозящий момент момент Δ = сω , пропорциональный квадрату скорости.
Для изображения механических характеристик двигателей в теории электропривода принято использовать систему координат
ω(),
а для механических характеристик механизмов – «перевернутую» систему координат
(ω).
Применение разных систем координат для двигателей и механизмов создает трудности при рассмотрении электромеханических свойств электропривода, состоящего из электродвигателя и механизма.
Поэтому на практике для изображения механических характеристик двигателей и механизмов принята единая система координат ω(), т.е система, принятая для механических характеристик электродвигателей.
В этой системе координат ω(), механические характеристики механизмов показаны на рис. 4.1б.
Рис.4.2Механические характеристики исполнительных механизмов в системе координат ω():1 – статический момент сопротивления механизма пропорционален квадрату угловой скорости; 2 – статический момент сопротивления механизма пропорционален угловой частоте вращения; 3 – статический момент сопротивления механизма не зависит от угловой частоты вращения вала механизма.
Статические моменты судовых механизмов
Статический момент (момент сопротивления) пропорционален частоте вращения (рис.4.2,кривая 2). В такой режим входит двигатель постоянного тока при динамическом торможении, когда якорь двигателя замкнут на резистор, а ток возбуждения не изменяется.
Статический момент (момент сопротивления) не зависит от частоты вращения (кривая 3). Характерно для подъемных кранов, лебедок, поршневых насосов при подъеме воды на постоянную высоту, транспортеров, конвееров с постоянной передвигаемой массой. Для пуска и ускорения таких механизмов двигатель должен развивать пусковой момент значительно больший их статического момента.
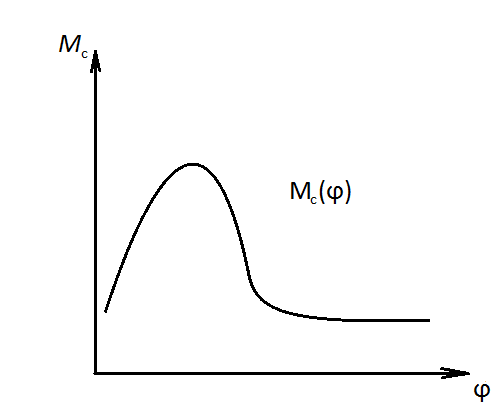
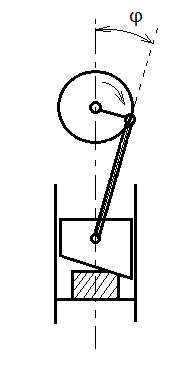
Данные о статическом моменте (моменте сопротивления) механизма приводятся в технической инструкции. Для некоторых механизмов статический момент (момент сопротивления) зависит от траектории движения исполнительного механизма (от угла поворота). Например, в поршневом компрессоре, ножницах для резки металла, приводе рулевого устройства (Рис.4.3).
Рис 4.3 Механическая характеристика поршневого компрессора. Статический момент сопротивления зависит от траектории движения исполнительного механизма.
Иногда статический момент изменяется из-за изменения свойств обрабатываемого механизмами материала (вещества). И закономерности изменения момента сопротивление от скорости нельзя выразить ни графически, ни аналитически (например камнедробилки, бетономешалки).
Для электродвигателей угловая скорость и элетромагнитный момент связаны одинаковой зависимостью и обуславливают друг друга.
Статические моменты судовых механизмов могут быть функциями различных величин и поэтому признаку делятся на пять классов.
Моменты, не зависящие от параметров движения = const (для грузоподъемных механизмов).
1. Моменты, зависящие от скорости: = f(ω) для электромеханических преобразователей. Центробежных насосов, вентеляторов.
2. Моменты, зависящие от пути (угла поворота) = f(α). Для шпилей, брашпилей.
3. Моменты, зависящие от скорости и угла поворота. = f(). Для электромеханических рулевых устройств.
4. Моменты, зависящие от времени = f (t). Для буксирных лебедок.
В общем случае статический момент механизма выражается уравнением,

 или
или  (
(  ) называются механическими характеристиками.
) называются механическими характеристиками. от угловой скорости – ω, т.е
от угловой скорости – ω, т.е , приведенной к валу двигателя от статического момента механизма, т.е
, приведенной к валу двигателя от статического момента механизма, т.е . (4-5)
. (4-5) .
. ).
). , статический момент механизма является функцией скорости
, статический момент механизма является функцией скорости  (ω).
(ω). .
. (ω)
(ω)  = сonst (4- 6 )
= сonst (4- 6 ) не зависит от ω
не зависит от ω  скорости дигателя.
скорости дигателя. + Δ
+ Δ  , (4- 7 )
, (4- 7 ) – момент холостого хода, без нагрузки на валу дигателя ;
– момент холостого хода, без нагрузки на валу дигателя ; – момент, создаваемый рабочим органом механизма при выполнении полезной работы (с – постоянный коэффициент, ω – угловая скорость вала механизма).
– момент, создаваемый рабочим органом механизма при выполнении полезной работы (с – постоянный коэффициент, ω – угловая скорость вала механизма).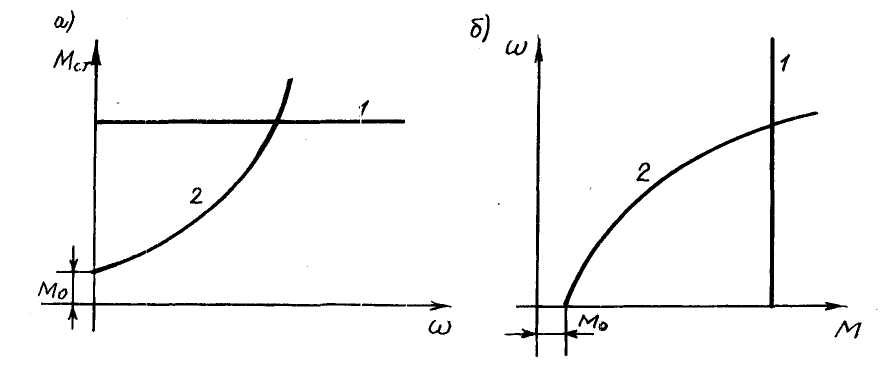
 ).
). , создаваемый только силами трения в элементах привода, а момент, создаваемый трением о среду равен нулю сω
, создаваемый только силами трения в элементах привода, а момент, создаваемый трением о среду равен нулю сω  .
. трение лопастей о воздух, воду или другую среду увеличивается и по мере разгона статический момент механизма резко увеличивается за счет того, что к моменту холостого хода
трение лопастей о воздух, воду или другую среду увеличивается и по мере разгона статический момент механизма резко увеличивается за счет того, что к моменту холостого хода 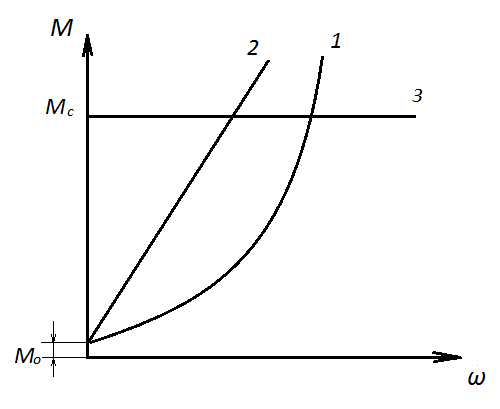
 = const (для грузоподъемных механизмов).
= const (для грузоподъемных механизмов). ). Для электромеханических рулевых устройств.
). Для электромеханических рулевых устройств. + (
+ (  )
)  (4-9)
(4-9) – начальный статический момент, создаваемый трением.
– начальный статический момент, создаваемый трением. – номинальный момент нагрузки, соответствующий номинальной
– номинальный момент нагрузки, соответствующий номинальной .
.
 показатель степени, определяющий характер зависимости
показатель степени, определяющий характер зависимости  от
от угловой скорости
угловой скорости  ,(
,(  1 <
1 <  1 до +2( для вентиляторов 2).
1 до +2( для вентиляторов 2). (4-10)
(4-10)