УУ ВМ - реализует функцию управления ходом вычислительного процесса обеспечивая автоматическое выполнения команд программы. Основные целевые функции УУ в ходе типового машинного цикла:
1. Выборка и декодирование команды
2. Вычисление исполнительных адресов и выборка операндов
3. Исполнение операции
4. Формирование адреса следующей команды
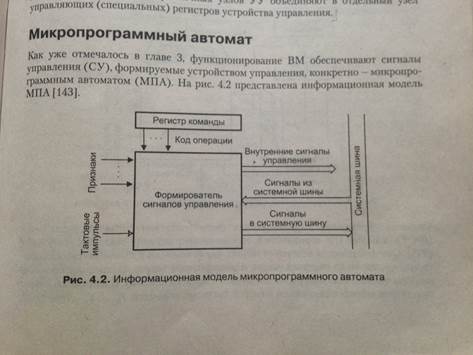
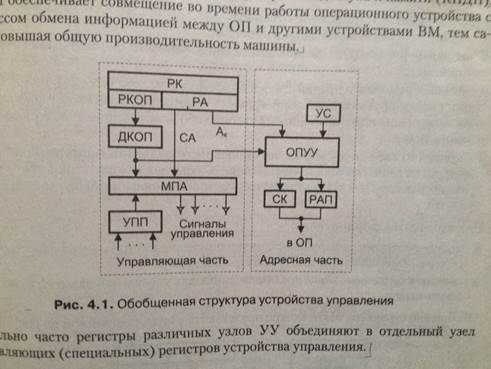
Сигналы управления генерируются центральным узлом УУ, то есть микропрограммой автоматом (МПА), МПА определяет микропрограмму как последовательность выполнения микроопераций. Микропрограммы реализации перечисленных целевых функций инициируется УУ. В обобщенной структуре УУ можно выделить 2 части:
1. Управляющую - предназначена для управления работой исполнительного оборудования ВМ
2. Адресную - адресная часть УУ обеспечивает формирование адресов команд и исполнительных адресов операндов, то есть относится к исполнительному оборудованию ВМ.
В состав управляющей части УУ входит: РК(Регистор команды), ДКОП(Дешефратор кода операций),МПА (микропрограммный автомат) , УПП ( узел прерывания программ)
Операционный узел устройства управления (ОПУУ) , называемый иначе узлом индексной арифметики или узлом адресной арифметики. Обрабатываю адресные части команд, формирую исполнительные адреса операндов, а так же подготавливает адрес следующей команды, при выполнении команд перехода. Состав ОПУУ может быть аналогичен составу основном операционному устройства ВМ.
В состав УУ могут так же входить дополнительные узлы, в частности узел организации прямого доступа к памяти. Этот узел обычно реализуется в виде самостоятельного устройства , контролера прямого доступа к памяти (КПДП).
КПДП обеспечивает совмещение во времени работы операционное устройство с процессом обмена информации между ОП и другими устройствами ВМ, тем самым повышая общую производительность машины. Довольно часто Рг узлов УУ объединяют в отдельный узел управляющих Рг УУ.
Указатель Стека (УС)
Регистор адреса памяти (РАП)
Счетчик команд(СК)
Микропрограммный автомат
Код операций попадает в регистор команды, который делится на 2 части: Регистр кода операций и Регистр адреса.С Регистра кода операции попадает в дешифратор кода операций,дкоп преобразует его в форму понятную микропрограмному автомату. МПА преобразует поступившую команду в сигнал управления.Устройство прерывания программ позволяет прервать код выполняемой программы по результату выполнения программы или по внешнему управлению.
Из регистра адреса на мпа поступает код способа адресации, который мы выбрали.
Из регистра адреса адресный код поступает на ОПУУ. По результатам работы Дкоп расшифрованный код команды так же поступает на ОПУУ, дабы указать как применить данный адресный код.
Протоколы шин.
Перекос сигналов - одновременно выставленные биты на какую-либо шину поступают к получателю в различные периоды времени. Метод выбираемые проектировщиками шин для информирования достоверности адреса, данных, управляющей информацией и информацией состояния называется протоколом шины.
Используются 2 основных класса протоколов - синхронный и асинхронный.
В синхронном протоколе все сигналы привязаны к импульсам единого генератора тактовых импульсов.
В асинхронном пропотелое для каждой группы линии шины формируется свой сигнал подтверждения достоверности.
Синхронный протокол
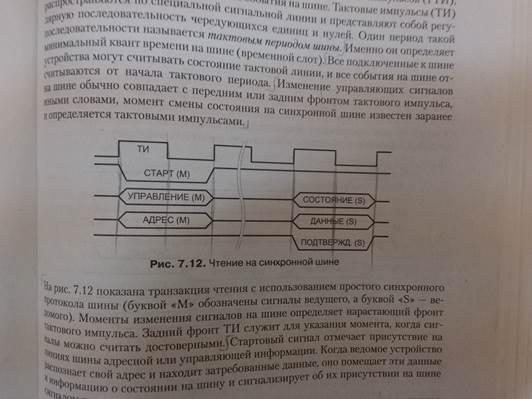
В синхронных шинах имеется центральный генератор тактовых импульсов , к импульсам которого привязаны все события на шине. Тактовые импульсы распространяются по специальной сигнальной линии и представляет собой регулярную последовательность чередующихся 1 и 0.
Один период такой последовательности называется тактовым периодом шины , именно он представляет минимальный квант времени на шине (временной слот). Все подключенные к шине устройства могут считывать состояния тактовой линии и все события на шине отсчитываются от начала тактового периода. Изменение управляющих сигналов на шине обычно совпадает с передним или задним фронтом тактового импульса, иными словами момент смены состояния на синхронной шине известен заранее и определяется тактовыми импульсами.
В моменты изменения сигналов на шине определяет нарастающий фронт тактового импульса. Задний фронт тактового импульса служит для указания момента , когда сигналы можно считать достоверным. Стартовый сигнал отмечает присутствие на линиях шины адресной или управляющей информации. Когда ведомое устройство распознает свой адрес и находит затребованные данные , оно помещает эти данные и информацию о состоянии на шину и сигнализирует об их присутствии на шине сигналом подтверждения.
При записи отличие состоит в том, что данные выдаются ведущим в тактовом периоде следующим за тактовым периодом выставления адреса и остаются на шине до отправки ведомым сигнала подтверждения и информации состояния.
Плюсы синхронного протокола:
1. Требует меньше сигнальных линий
2. Проще для понимания
3. Проще для реализации и тестирования.
Минусы:
1. Менее гибки по сколько привязаны к конкретной максимальной тактовой частоте.
Асинхронный протокол
В асинхронном протоколе начало очередного события на шине определяется не тактовым импульсом а предшествующим событием и следует непосредственно за этим событием. Помещение ведущим устройством на шину любой информации сопровождается соответствующим синхронизирующим сигналом который называется «Стробом».
В свою очередь, ведомое устройство для поддержания асинхронного протокола может вырабатывать свои синхронизирующие сигналы, называемые квитирующими сигналами или подтверждениями сообщения.
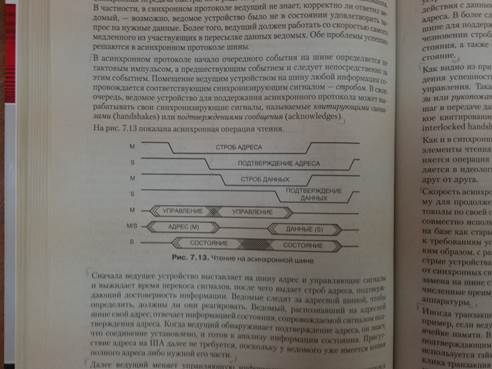
Сначала ведущее устройство выставляет на шину адрес и управляющие сигналы и выжидает время перекоса сигналов, после чего выдает строб адреса, подтверждающий достоверность информации. Ведомые следят за адресной шиной, чтобы определить, должны ли они реагировать. Ведомый, распознавший на адресной шине свой адрес, отвечает информацией состояния, сопровождаемой сигналом подтверждения адреса. Когда ведущий обнаруживает подтверждение адреса, он знает, что соединение установлено, и готов к анализу информации состояния. Присутствие адреса на ША далее не требуется, поскольку у ведомого уже имеется копия полного адреса либо нужной его части.
Далее ведущий меняет управляющую информацию, выжидает время перекоса и выдает строб данных. Если это происходит в транзакции записи, то ведущий одновременно с управляющей информацией выставляет на шину записываемые данные. В рассматриваемом случае управляющая информация извещает ведомое устройство, что это чтение. Когда ведомый подготовит затребованные данные, он выдает их на шину совместно с новой информацией о состоянии и формирует сигнал подтверждения данных. Обнаружив сигнал подтверждения данных, ведущее устройство читает данные с шины и снимает строб данных, чтобы показать, что действия с данными завершены. В нашем примере ведущий снимает также и строб адреса. В более сложных вариантах транзакции строб адреса может оставаться на шине для поддержания соединения в течение нескольких циклов данных. При исчезновении строб данных ведомый снимает с шины данные и информацию состояния, а также сигнал подтверждения данных, переводя шину в свободное состояние.
Как видно из приведенного описания, в цикле асинхронной шины для подтверждения успешности транзакции используется двунаправленный обмен сигналами управления. Такая процедура носит название квитирования установления связи или рукопожатия. В рассмотренном варианте процедуры ни один шаг в передаче данных не может начаться, пока не завершен предыдущий шаг. Такое квитирование известно как квитирование с полной взаимоблокировкой.
Как и в синхронных протоколах, в любой асинхронной транзакции присутствуют элементы чтения и записи: по отношению к управляющей информации выполняется операция записи, а к информации состояния - чтения. Различие проявляется в идеологии координации этих операций, установления их зависимости друг от друга.
Скорость асинхронной пересылки данных диктуется ведомым, поскольку ведущему для продолжения транзакции приходится ждать отклика. Асинхронные протоколы по своей сути являются самосинхронизирующимися, поэтому шину могут совместно использовать устройства с различным быстродействием, построенные на базе как старых, так и новых технологий. Шина автоматически адаптируется к требованиям устройств, обменивающихся информацией в данный момент. Таким образом, с развитием технологий к шине могут быть подсоединены более быстрые устройства, и пользователь сразу ощутит все их преимущества. В отличие от синхронных систем, для ускорения системы с асинхронной шиной не требуется замена на шине старых медленных устройств на более быстрые и новые. Платой за перечисленные преимущества асинхронного протокола служит некоторое усложнение аппаратуры.
Иногда транзакция на шине не может быть завершена стандартным образом, например, если ведущий из за программных ошибок обращается к несуществующей ячейке памяти. В этом случае ведомое устройство не отвечает соответствующим подтверждающим сигналом. Чтобы предотвратить бесконечное ожидание в шинах, используется тайм-аут, то есть задается время, спустя которое при отсутствии отклика транзакция принудительно прекращается.

 позволяет прервать код выполняемой программы по результату выполнения программы или по внешнему управлению.
позволяет прервать код выполняемой программы по результату выполнения программы или по внешнему управлению.