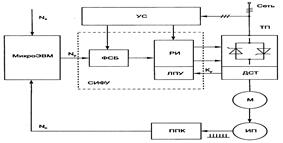
Для снижения требований к быстродействию МПС (микропроцессорные системы) широко используется аппаратно-программная реализация алгоритмов управления. Пример электропривода постоянного тока с тиристорным преобразователем приведен на рис. 3.7. Его основными функциональными узлами являются микроЭВМ, СИФУ с устройством синхронизации (УС), реверсивный тиристорный преобразователь (ТП) с датчиками состояния тиристоров (ДСТ) и измерительный преобразователь ИП перемещений.
Рис. 3.7. Электропривод с микроЭВМ
Алгоритмы, требующие большого объема вычислений, реализованы аппаратно. К ним относятся: формирование кода скорости, фазосмещение импульсов управления тиристорами, логика раздельного управления ТП. Программным путем реализуются следующие функции управления: прием и обработка дискретной информации измерительного преобразователя «перемещение —цифровой код» (ППК), расчет кода Ny управляющего воздействия в соответствии с применяемыми законами управления. Программным путем реализованы регуляторы стандартной настройки (П, ПИ, ПИД) в контурах положения и скорости. Для управления двигателем М применяется реверсивный ТП с раздельным управлением, обеспечивающим лучшие массогабаритные показатели. ТП имеет лучшие динамические показатели при мостовой схеме соединения вентилей. Одновременная работа групп вентилей при встречно-параллельной схеме ТП исключается логическим переключающим устройством (ЛПУ), получающим сигналы от ДСТ. Фазосмещение импульсов управления ТП осуществляется единой для всех каналов СИФУ с устройством синхронизации УС. Одноканальная СИФУ обусловливает аппаратные затраты на наладку и обслуживание. УС формирует код цифровой развертки, поступающий в фазосдвигающий блок ФСБ. Код жестко синхронизирован с началом и концом интервала напряжения сети. Распределитель импульсов РИ формирует отпирающие импульсы по тиристорам ТП с учетом фазы напряжения питания. ЛПУ осуществляет выбор группы тиристоров по знаковому разряду кода управления Ку при отсутствии тока в ТП, что фиксирует ДСТ. В качестве ИП применяется фотоэлектрический датчик BE-178. Обработка сигналов датчика с целью получения кода скорости Nc производится в ППК, режим работы которого зависит от абсолютного значения частоты вращения вала двигателя. Переключение режимов осуществляется сигналом от микроЭВМ. Рассмотренная схема электропривода может быть реализована на основе микроЭВМ «Электроника-60», «Электроника НЦ-80» и их модификаций. Время реализации программы для микроЭВМ «Электроника-60» составляет примерно 1,5 мс. Электропривод снабжен системой диагностики отказов отдельных блоков, которая формирует сигналы прерывания программы МП. Программными средствами производится идентификация модуля, вызвавшего прерывания, вырабатывается реакция системы и соответствующая информация выводится на дисплей. Представленный привод обеспечивает диапазон регулирования не менее 104 и полосу пропускания от 20 до 35 Гц.
Вопрос Основные понятия и показатели надежности электропривода.
Важнейшим свойством систем управления электроприводами является надежность. Надежностью называется свойство устройства выполнять необходимые функции, сохраняя в течение заданного промежутка времени значения эксплуатационных показателей в требуемых пределах. Если все параметры устройства соответствуют требованиям документации, такое состояние называют работоспособным, а событие, состоящее в нарушении работоспособности, — отказом.
Отказ может наступить не только при механических или электрических повреждениях (обрывы, короткие замыкания), но и при нарушении регулировки, из-за «ухода» параметров элементов за допустимые пределы и т.п. Отказы отдельных элементов, а также изменения параметров элементов могут привести к нарушению устойчивости САУ и ухудшению показателей качества переходного процесса (времени установления переходного процесса, установившегося значения регулируемого параметра, перерегулирования, установившейся ошибки), что также является отказом системы.
Различают внезапные и постепенные отказы. Внезапные отказы возникают в результате скачкообразного изменения эксплуатационных параметров элемента или устройства. Они являются результатом скрытых недостатков технологии производства или скрытых изменений параметров, накапливающихся в процессе эксплуатации при ударах, вибрациях и т.д. Примеры внезапных отказов — обрыв провода, короткое замыкание, пробой полупроводникового прибора. Постепенные отказы характеризуются постепенными, плавными изменениями во времени параметров элементов или устройств, вызванными необратимыми процессами старения, износа, а также нарушением условий регулировки.
Надежность проявляется через безотказность, долговечность, ремонтопригодность и сохраняемость.
Безотказность — свойство системы (элемента) непрерывно сохранять работоспособность в течение некоторого времени.
Долговечность — свойство системы (элемента) сохранять работоспособность до наступления предельного состояния с перерывами для технического обслуживания и ремонтов. Предельное состояние может устанавливаться по изменениям параметров, условиям безопасности, экономическим показателям, необходимости капитального ремонта и т.д.
Ремонтопригодность — свойство системы (элемента), заключающееся в приспособлении ее к предупреждению, обнаружению и устранению отказов путем проведения технического обслуживания и ремонта.
Сохраняемость — свойство системы (элемента) непрерывно сохранять исправное, работоспособное состояние в течение всего времени хранения.
Надежность системы управления зависит от условий эксплуатации, схемного и конструктивного исполнения, количества и качества формирующих ее элементов. Надежность элементов зависит от качества материалов, технологии изготовления и т.п.
Поскольку отказы являются случайными событиями, то для исследования надежности применяют теорию вероятностей и математическую статистику.
Количественные характеристики надежности — вероятность безотказной работы, интенсивность отказов, средняя наработка до отказа (среднее время безотказной работы) и др.
Вероятность безотказной работы P(t) — вероятность того, что в заданном интервале времени t не возникает отказ. При испытании или эксплуатации изделий вероятность безотказной работы определяется следующей статистической оценкой:
где N0— число изделий в начале испытаний; n(t) — число изделий, вышедших из строя за время t; t — время, для которого определяется вероятность безотказной работы.
При увеличении числа изделий N0статистическая оценка вероятности Р (t) практически не меняется, т.е. P(t) = Р (t).
Интенсивностью отказов называется отношение числа изделий, отказавших в единицу времени, к среднему числу изделий, продолжающих исправно работать:
где n(Δt) — число изделий, отказавших в интервале времени от t - Δt/2 до t + Δt/2; N = (Ni + Ni+1)/2 — среднее число изделий, исправно работающих в интервале Δt; Ni, Ni+1— число исправно работающих изделий соответственно в начале и конце интервала Δt.
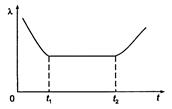
Типичная кривая изменения интенсивности отказов во времени представлена на рис. 4.1. На участке 0 –t1(участок приработки) из-за скрытых дефектов интенсивность отказов высока, но с течением времени уменьшается. Для систем управления длительность участка составляет десятки, а иногда сотни часов. Уменьшить его можно за счет предварительной отбраковки и обкатки элементов и блоков.
Рис. 4.1. Типичная зависимость интенсивности отказов аппаратуры во времени
Участок t1 — t2(участок нормальной эксплуатации) характеризуется примерным постоянством интенсивности отказов. Длительность участка — тысячи и десятки тысяч часов.
На участке t >t2 в результате износа и старения интенсивность отказов начинает возрастать. При достижении времени t2 дальнейшая эксплуатация системы нецелесообразна.
При постоянной интенсивности отказов λ(t) = λ вероятность безотказной работы P(t) = е-λt.
Средняя наработка до отказа (среднее время безотказной работы) при постоянной интенсивности отказов Tср =1/λ.
Количественные показатели надежности используются при формулировании требований к надежности проектируемых изделий, сравнении изделий по уровню надежности, определении объема запасных частей, расчете сроков службы изделий и т.д.
I.по дисциплине «Электропривод в АСУ ТП»
1 Назначение и функции систем автоматизированного управления электроприводами (АЭП).
2 Типовые узлы и схемы управления электроприводами.
3 Классификация схем электропривода.
4 Общие требования к выполнению принципиальных схем электропривода.
5 Принципы автоматического управления пуском и торможением электродвигателей.
6 Типовые узлы и схемы автоматического управления пуском двигателей постоянного тока.
7 Схема пуска ДПТ параллельного возбуждения в функции ЭДС.
8 Схема пуска ДПТ параллельного возбуждения в функции тока.
9 Схема нереверсивного пуска ДПТ в функции времени.
10 Схема управления асинхронным двигателем с короткозамкнутым ротором с нереверсивным магнитным пускателем.
11 Схема пуска асинхронного двигателя с фазным ротором.
12 Схема прямого пуска синхронного двигателя напряжением до 1000 В.
13 Схема управления асинхронным двигателем с короткозамкнутым ротором с реверсивным магнитным пускателем.
14 Тиристорное управление асинхронным двигателем с короткозамкнутым ротором.
15 Элементы и устройства замкнутых систем управления электроприводами. Классификация элементов АЭП.
16 Элементы и устройства замкнутых систем управления электроприводами. Регуляторы.
17 Датчики координат АЭП.
18 Системы импульсно-фазового управления. Принципы управления тиристорами.
19 Основные узлы систем управления тиристорными преобразователями.
20 Реверсивный вентильный электропривод с совместным и раздельным управлением.
21 Построение систем подчиненного регулирования электропривода с управляемым вентильным преобразователем.
22 Импульсное регулирование скорости асинхронного двигателя.
23 Частотное регулирование скорости асинхронного двигателя.
24 Устройство ЭВМ для управления электроприводами. Основные термины.
25 Электропривод с микро-ЭВМ.
26 Основные понятия и показатели надежности электропривода.