В настоящее время в электроприводе постоянного тока используются в основном системы подчиненного регулирования координат, которые характеризуются простотой расчета и наладки, удобством ограничения промежуточных координат системы.
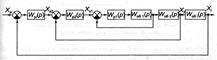
Система подчиненного регулирования представляет собой многоконтурную систему последовательного действия (рис. 2.57). Каждый контур в системе содержит отдельный регулятор, параметры которого рассчитываются в соответствии с передаточной функцией объекта регулирования этого контура. Количество регуляторов с передаточными функциями Wр1(p), Wp2(p),...,Wрi(p)в системе регулирования равно числу регулируемых координат Х1, X2,—,Xi.В системах регулирования скорости используются двухконтурные, а в системах регулирования положения — трехконтурные системы подчиненного регулирования. На вход каждого регулятора поступают сигналы заданного Хз1, Хз2,...,Х3i, и действительного Х\, X2,...,Xiзначений регулируемой координаты. Каждый предыдущий регулятор формирует задающий сигнал для последующего регулятора. Ограничения регулируемой координаты обеспечиваются ограничением выхода предыдущего регулятора.
Рис. 2.57. Структурная схема системы подчиненного регулирования
22Вопрос Импульсное регулирование скорости асинхронного двигателя.
Импульсное регулирование скорости АД стало возможным благодаря совершенствованию характеристик силовых полупроводниковых приборов, главным образом тиристоров. Его суть заключается в дискретном (импульсном) изменении параметров АД или питающей сети, при котором возникают периодические колебания момента АД. В установившемся режиме среднее значение момента двигателя равно статическому моменту.
При импульсном регулировании в цепи статора может быть использована схема с ТРН, приведенная на рис. 2.64. Однако режим работы тиристоров здесь предполагается иным: они должны открываться и запираться все одновременно. Это возможно лишь в том случае, если время включенного (выключенного) состояния превышает период напряжения питающей сети. Такой способ отличается крайне низкими энергетическими показателями и тяжелыми условиями работы тиристоров и поэтому не нашел применения в промышленности.
Чаще всего импульсное регулирование применяется в электроприводах с АД с фазным ротором при регулировании в цепи ротора. С этой целью может быть использована схема (рис. 2.69), которая позволяет либо включить Rдоб в цепь ротора, либо замкнуть ротор накоротко. В приведенной схеме для этой цели используются симмисторы VS1, VS2. При достаточно большой частоте коммутации симмисторов fком можно считать, что в цепь ротора включено некоторое добавочное эквивалентное сопротивление Rэкв,значение которого изменяется от нуля до Rдоб, при изменении скважности включения симмисторов τ = tвкл /Т0от 1 до 0. Здесь tвкл — длительность замкнутого состояния симмисторов; То=1/ fком — период коммутации. В этом случае
Rэкв=Rдоб (1 - τ).
Рис. 2.69. Схема импульсного регулятора скорости АД на симмисторах в цепи ротора
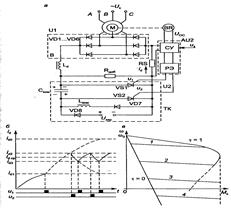
Частота коммутации fком в приведенной схеме не может превышать частоту тока в роторе. С учетом низкой частоты тока в роторе, особенно вблизи номинальных значений параметров, такое управление приводит к большим пульсациям момента. Кроме того, включаться симмисторы могут только в момент перехода напряжения через нуль, т.е. с довольно низкой частотой. По этим причинам большее применение нашла схема, приведенная на рис. 2.70, а, где резистор Rдоб и дроссель Ldвключаются в цепь выпрямленного тока ротора, полученного с помощью выпрямителя на диодах VD1...VD6. Шунтирование резистора осуществляется тиристорным коммутатором ТК, состоящим из основного тиристора VS1, коммутирующего тиристора VS2, коммутирующих конденсатора Скоми дросселя Lкоми диода VD7.
Для повышения жесткости механических характеристик и увеличения диапазона регулирования применяется замкнутая система, в которой управление тиристорами VS1 и VS2 осуществляется в функции выпрямленного тока ротора id и скорости двигателя. Указанные сигналы поступают в суммирующее устройство СУ; для управления тиристорами служит релейный элемент РЭ. Датчиком тока является шунт RS. При запертых тиристорах VS1 и VS2 и включении двигателя в цепь ротора включено сопротивление Rдоб и выпрямленный ток idнарастает по экспоненте (из-за влияния индуктивности сглаживающего дросселя Ld) до значения idl (рис. 2.70, б). Для нормального функционирования коммутатора предварительно должна быть подготовлена коммутирующая цепь. Сэтой целью при включении АД отпирается тиристор VS2 и конденсатор Ском заряжается от выпрямителя В по цепи В+ - Ld - Ском - VS2 - RS – В-; в конце заряда имеет место положительный потенциал на верхней обкладке (рис. 2.70, а). Процесс заряда не оказывает влияния на работу АД из-за его кратковременности. При отпирании VS1 управляющим импульсом U1 от РЭ ток idв роторной цепи ограничивается лишь сопротивлением обмотки ротора, сопротивлением дросселя Rдри шунта Rш, что может привести к его нарастанию по экспоненте до некоторого значения id0. Одновременно с отпиранием VS1 происходит разряд коммутирующего конденсатора С+ком- VS1 -VD7-Lком –С-ком- Параметры этой цепи подбираются таким образом, что разряд имеет колебательный характер, в результате чего конденсатор Скомприобретает «+» на нижней обкладке (показано справа на рис. 2.70, а). На этом колебательный процесс заканчивается благодаря запирающим свойствам диода VD7 при запертом тиристоре VS2.
При достижении током ротора значения id2(рис. 2.70, б), что контролируется шунтом RS, релейный элемент вырабатывает импульс на VS2, который открывается, и положительный заряд конденсатора Ском прикладывается к катоду тиристора VS1, который запирается. Начинается процесс перезаряда конденсора Ском по той же цепи В+ - Ld- Ском- VS2 - RS – В-, в результате чего на верхней обкладке Ском вновь появляется «+», а тиристор VS2 запирается. В этом процессе в течение некоторого времени положительный потенциал прикладывается к катоду VS1, обеспечивая тем самым восстановление его запирающих свойств (20...80 мкс в зависимости от типа тиристора). Запирание тиристора VS1 означает, что в цепь ротора вновь вводится сопротивление Rдоби ток уменьшается по экспоненте до значения id3, при котором РЭ снова подает импульс u1на VS1. Управляющие импульсы u1и u2, подаваемые на тиристоры VS1 и VS2 соответственно, показаны на рис. 2.70, б. Далее работа схемы повторяется. Эквивалентное сопротивление роторной цепи зависит от скважности т. Регулируя скважность τ изменением момента подачи импульса на VS2, можно регулировать среднее значение тока idср ротора, а следовательно, и его момента. Механические характеристики такого электропривода (рис. 2.70, в) располагаются в зоне, ограниченной значениями τ=1 и τ=0.
Рис. 2.70. Импульсное регулирование в цепи ротора АД: а — электрическая схема; б — временные диаграммы работы регулятора; в — механические характеристики в замкнутой системе
Значение эквивалентного добавочного сопротивления Rдоб.экв находится следующим образом:
Rдоб.экв= Rдоб(1-τ)+Rдр+Rш,
где Rдр, Rш – активное сопротивление соответственно сглаживающего дросселя Ldи шунта RS.
Получим выражение для полного приведенного активного сопротивления ротора:
где Ктр—коэффициент трансформации двигателя; — активное сопротивление фазы обмотки ротора.
Для получения жестких характеристик 1, 2, 3(рис. 2.70, в) применяется обратная связь по скорости. В этом случае сигнал UOCсуммируется с сигналом по току, вызывая изменение границы срабатывания РЭ. Например, увеличение скорости вызывает срабатывание РЭ при меньшем токе в якорной цепи.
При продолжительном включении VS1 конденсатор Ском может не сохранить достаточный для коммутации заряд. Решением является использование дополнительного источника Uзар и диода VD8 для поддержания напряжения на Ском на нужном уровне.
Основная область применения рассмотренного электропривода — механизмы подъема, передвижения и поворота крановых установок
23Вопрос Частотное регулирование скорости асинхронного двигателя.
Частотное регулирование скорости АД является наиболее экономичным и поэтому рассматривается как основной и наиболее перспективный способ. Его суть заключается в регулировании синхронной скорости за счет изменения частоты питания статора АД. Экономичность частотного регулирования скорости объясняется тем, что при регулировании частоты не происходит увеличения скольжения, как, например, при реостатном регулировании.
Полное использование электрической машины, в том числе АД, имеет место, если она работает с номинальным магнитным потоком. В свою очередь номинальный поток определяется геометрическими размерами и физическими свойствами магнитной цепи. Магнитный поток Ф двигателя создается током намагничивающего контура I0(см. рис. 2.62), который пропорционален ЭДС Es:
где fs— частота напряжения статора; Ws — число витков обмотки; — обмоточный коэффициент.
Обозначив в формуле (2.52) Ке=4,44, запишем:
,
откуда вытекает естественное соотношение
,
которое говорит о том, что для полного использования двигателя наряду с изменением частоты питания fsнеобходимо пропорционально ей изменять Es. ЭДС является внутренним параметром АД, воздействовать же на двигатель можно лишь напряжением. При управлении ставится задача сохранения перегрузочной способности двигателя М*, которая определяется отношением критического момента Мкк моменту нагрузки Мс. Имея в виду упрощенную модель (Rs= 0) двигателя, для нахождения Мквоспользуемся формулой , учитывая, что
(где и - индуктивности рассеяния статора и ротора):
.
Отсюда следует, что для любой частоты должно соблюдаться пропорциональное ей изменение напряжения. Еще раз подчеркнем, что соотношение (2.54) получено при пренебрежении сопротивлением статора Rs.
Для пояснения законов частотного регулирования необходимо принять во внимание, что момент нагрузки Мстакже может изменяться в зависимости от скорости вращения. При условии Мк/Мс=М*= const для любых значений ω01 и ω02должно соблюдаться соотношение
,
где Мс1, Мс2 — моменты нагрузки при синхронных скоростях АД ωo1и ωo2соответственно. Отсюда следует предложенный академиком М.П. Костенко в 1925 г. основной закон изменения напряжения при частотном способе регулирования скорости АД:
,
где – относительное напряжение; – относительная частота; – относительный момент, показывающий изменение статического момента при регулировании скорости.
Выражение (2.55) является универсальным, и с его помощью могут быть получены частные случаи.
При постоянстве момента нагрузки Мс = const по формуле (2.55) получим
,
т.е. напряжение на статоре двигателя должно меняться пропорционально его частоте.
Для вентиляторного момента нагрузки соотношение (2.55) имеет вид . Если момент нагрузки изменяется обратно пропорционально скорости, то имеет место зависимость .
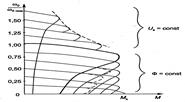
Механические характеристики АД при регулировании по закону (2.53) и, следовательно, при Мк=const, которые могут быть получены при регулировании вниз от номинальной частоты α < 1, показаны на рис. 2.71. При частотах, близких к номинальной, они практически совпадают с характеристиками при пропорциональном управлении . Однако при соблюдении закона (2.56) по мере снижения частоты при α < 0,2 (для двигателей Рном<5 кВт даже при больших значениях α) все более сказывается влияние активного сопротивления статора, которым пренебрегли при получении зависимости (2.54). Это проявляется в уменьшении Мки, соответственно, перегрузочной способности двигателя. Соответствующие характеристики показаны штриховой линией. Компенсация Rs осуществляется в замкнутых системах регулирования.
При частотах выше номинальной (α > 1) соблюдение закона (2.56) нереализуемо, так как напряжение на АД не может превышать номинальное. Поэтому в этой зоне регулирование осуществляется при Us = Usном= const и критический момент снижается (рис. 2.71).
Рис. 2.71. Механические характеристики АД при частотном управлении
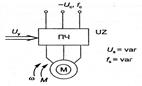
Укрупненная функциональная схема электропривода с частотным регулированием скорости представлена на рис. 2.72. Главным элементом этой схемы является преобразователь частоты ПЧ, осуществляющий, как было показано, регулирование частоты и напряжения по одному из законов. Задачей ПЧ является преобразование напряжения сети (Uc, fc),подаваемого на АД. По информационному каналу на ПЧ подается сигнал управления Uy. Согласно сложившейся терминологии, такие электроприводы называются частотными. Они различаются типами ПЧ, способами формирования напряжения и видами обратных связей. Для получения совершенных характеристик частотного электропривода применяются замкнутые системы.


 — активное сопротивление фазы обмотки ротора.
— активное сопротивление фазы обмотки ротора. ,
, , учитывая, что
, учитывая, что (где
(где  и
и  - индуктивности рассеяния статора и ротора):
- индуктивности рассеяния статора и ротора): .
. ,
, – относительное напряжение; – относительная частота;
– относительное напряжение; – относительная частота;  – относительный момент, показывающий изменение статического момента при регулировании скорости.
– относительный момент, показывающий изменение статического момента при регулировании скорости. ,
, . Если момент нагрузки изменяется обратно пропорционально скорости, то имеет место зависимость
. Если момент нагрузки изменяется обратно пропорционально скорости, то имеет место зависимость  .
.