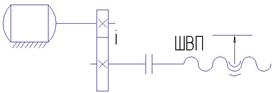
 Кинематическая схема ШД.
Кинематическая схема ШД.
Представляет собой корпус суппота.
Исходные данные:
i – передаточное число редуктора;
L – дискретность перемещения (цена шага, точность позиции) [м/имп];
tхв – шаг ходового винта [м/об];
vmax – максимальная скорость инструмента [м/мин];
Мс – момент сопротивления (включая трение холостого хода и сопротивление, вызываемое силами резания) [Нм];
Jпр – момент инерции.
Выбор ШД:
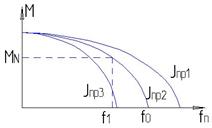
1. определение частоты приемистости


Если система регулирования реализует линейное изменение частоты (плавный разгон), то fп выбирается по f0, то есть  ,
, 
2. определение углового шага

На этом шаге может наоборот выбираться  ,
,  - передаточное число
- передаточное число
3. определение момента двигателя М
 , где Мс – момент сопротивления на ходовом винте
, где Мс – момент сопротивления на ходовом винте

 Мст – момент синхронизации
Мст – момент синхронизации 
Рекомендуется 
4. проверка двигателя по динамическим режимам
f0 – разгон на холостом ходу.
f1 – разгон под нагрузкой (рабочие подачи).
