Описание дискретных систем в пространстве состояний аналогично по форме описанию непрерывных систем. Путем введения промежуточных переменных (координат состояния) динамика дискретной системы управления или объекта представляется разностными уравнениями первого порядка.
(3.31)
и уравнением выхода
(3.32)
Уравнение (3.31) и (3.32) аналогичны по форме уравнениям (3.3). Поэтому матричное (векторное) представление дискретного объекта или всей системы будет иметь вид, аналогичный (3.7),
(3.33)
где X(k) – вектор дискретного (в моменты времени kT) состояния объекта;
A*, B*, C*– коэффициенты матрицы соответствующих размерностей.
Индекс * в (3.33) означает принадлежность к дискретному описанию объекта. В очевидных случаях этот индекс будет опускаться.
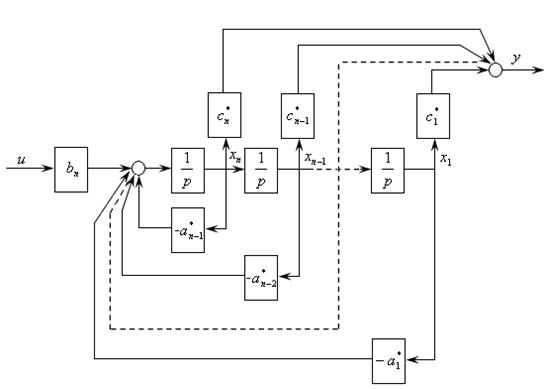
На рис.3.7 дана структурная схема дискретного описания n-мерного объекта в пространстве состояний, аналогичная структуре непрерывного описания в пространстве состояний (рис.3.2). Оператор Z-1 означает задержку по времени на один период.
Рис.3.7. Структурная схема дискретного описания
n-мерного объекта в пространстве состояний
В общем случае исходное описание объекта управления представляет дискретную передаточную функцию W(z), или непрерывную W(p), или систему уравнений (3.37). Рассмотрим способы перехода от этих форм описания к дискретной модели описания в пространстве состояний, т.е. в виде системы уравнений (3.33).
Наиболее простой переход к описанию в пространстве состояний осуществляется описанием объекта разностным уравнением n-го порядка. Если за координаты состояния принять следующие переменные
xi(k+1)=xi+1(k) или xi(k)=Dxi-1(k),
то систему n-го порядка можно представить в виде n разностных уравнений первого порядка. В векторной форме система этих уравнений имеет вид
(3.34)
Дискретное описание (3.34) аналогично по форме непрерывному описанию (3.18), где индекс * означает каноническую форму записи. Очевидно, что система (3.34) также представляет каноническую форму управляемости дискретного описания объекта. Поэтому коэффициенты матриц в уравнении (3.34) связаны с коэффициентами разностного уравнения теми же соотношениями, что и для непрерывного описания (3.19). Если объект описан дискретной функцией W(z) вида (3.23), то переход к описанию в форме (3.34) также осуществляется с помощью соотношений (3.19).
При исходном описании объекта непрерывной функцией W(p) необходимо сначала определить дискретную передаточную функцию W(z), используя точный (1.12) или приближенный методы (1.17). Затем, как и в предыдущем случае, дискретная модель представляется в форме (3.34).
Рис. 3.6 Структурная модель n-мерного объекта
в канонической форме управляемости
Если описание объекта задано моделью, связывающей вход-выход дифференциальным уравнением или передаточной функцией, то переход к модели, описывающей объект в пространстве состояний, наиболее просто осуществляется через нормальную форму (или каноническую форму управляемости).
В общем виде:
Несложно доказать, что связь между коэффициентами передаточной функции и коэффициентами матриц при описании в нормальной форме (3.14) определяется соотношениями
(3.19)
Справедливость этих соотношений подтверждается рассмотренным выше примером.
При bn=0 и an=1 выражения (3.19) значительно упрощаются.
Кроме того, коэффициенты нижней строки матрицы перехода совпадают с коэффициентами характеристического уравнения системы.
Для получения модели двигателя в нормальной форме можно также воспользоваться передаточной функцией, которая легко получается из системы уравнений (3.11). (момент нагрузки MH принимаем равным нулю)
- электромагнитная и электромеханическая постоянные времени.
Переход от описания объекта в пространстве состояний к структурно-операторному в виде передаточной функции осуществляется очевидным способом путем исключения промежуточных переменных. Можно также получить передаточную функцию, подвергнув выражение (3.7) преобразованию Лапласа
(3.20)
Из первого уравнения (3.20) получим
Подставим значение Х(р) во второе уравнение (3.20)
Следовательно,
Применяя правило возведения матриц в отрицательную степень получим
(3.21)
Пусть дан объект управления с передаточной функцией
. (4.1)
Свободное движение такого объекта определяется характеристическим полиномом
.
Требуется обеспечить качество переходных процессов, которое определяется эталонным (желаемым) характеристическим полиномом
. (4.2)
Коэффициенты эталонного полинома определяются из требований к качеству переходных процессов свободного движения. Например, если требуется, чтобы переходные процессы были апериодическими, необходимо, чтобы все корни уравнения (или полюса эталонной передаточной функции)
были действительные. Величины этих корней определяются из допустимой длительности переходных процессов. Наиболее часто применяемые стандартные полиномы и методы расчёта их коэффициентов, исходя из требований к переходным процессам, даны в Приложении 3.
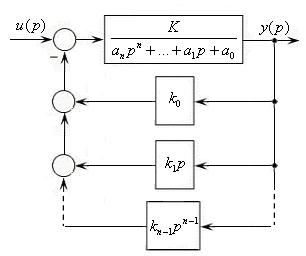
Решить поставленную задачу синтеза можно с помощью пропорционально-дифференциального регулятора, степень которого определяется порядком объекта управления, а именно
.
Система с таким регулятором представлена на рис. 4.2.
Рис. 4.2. Система с ПДn-1-регулятором
Результирующая передаточная функция замкнутой системы будет иметь вид
.
Применив правила объединения передаточных функций для системы на рис.4.2, получим
. (4.3)
Из равенства коэффициентов характеристического уравнения передаточной функции замкнутой системы (4.3) и эталонного характеристического уравнения (4.2) достаточно просто определяются необходимые коэффициенты обратных связей или ПДn-1-регулятора
. (4.4)
Однако практическая реализация такого, на первый взгляд, простого регулятора наталкивается на принципиально непреодолимое препятствие – необходимость получения производных первого, второго и выше порядков от выходного сигнала объекта.
Разрешить эту проблему позволяет применение регулятора состояния. Для этого представим описание объекта в фазовом пространстве состояний (см. параграф 3.1)
, (4.5)
где .
Уравнение регулятора состояния, которое обеспечивает требуемые переходные процессы, будет описываться следующим образом
, (4.6)
где V – задающий сигнал (скалярная величина);
- матрица-строка коэффициентов обратных связей по внутренним координатам объекта.
Структурная схема системы с таким регулятором состояния представлена на рис. 4.3.
Подставив в (4.5) выражение (4.6), получим матрично-векторное уравнение замкнутой системы регулирования
(4.7)
или
,
где .
Следовательно, характеристический полином замкнутой системы будет иметь следующий вид
. (4.8)
Получим выражения для коэффициентов РС-регулятора состояния
. (4.9)
Рис. 4.3. Структурная схема замкнутой системы управления
«объект + регулятор состояния», представленная в развёрнутом виде
Из сравнения выражений (4.4) и (4.9) видно, что коэффициенты ПДn-1- регулятора и коэффициенты регулятора состояния РС совпадают. Отличаются только индексы коэффициентов: в РС они на единицу больше, т.к. совпадают с индексами переменных состояния объекта, а в ПДn-1-регуляторе совпадают с индексами коэффициентов характеристического уравнения.
Таким образом, , где i = 1,2 … n.
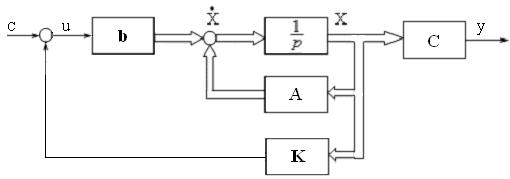
В общей векторной форме структурная схема замкнутой системы «объект управления + регулятор состояния» (ОУ + РС) представлена на рис.4.4.
Рис. 4.4. Структурная схема замкнутой системы управления
«объект + регулятор состояния», представленная в векторной форме
Преимущество регулятора состояния РС заключается в том, что не требуется дифференцирование выходного сигнала объекта. Однако при этом возникает другая принципиально разрешимая проблема – необходимо измерять все внутренние координаты состояния объекта. Если технически невозможно или нецелесообразно измерять внутренние координаты РС, то они могут быть вычислены (наблюдаемы), как показано на рис. 4.1,в, с помощью наблюдателя состояния объекта. Это значительно упрощает техническую реализацию замкнутой системы, и в этом заключается одно из главных преимуществ, которые дает применение регулятора состояния.

 (3.31)
(3.31) (3.32)
(3.32) (3.33)
(3.33)
 (3.34)
(3.34)

 (3.19)
(3.19)
 - электромагнитная и электромеханическая постоянные времени.
- электромагнитная и электромеханическая постоянные времени. (3.20)
(3.20)


 (3.21)
(3.21) . (4.1)
. (4.1) .
. . (4.2)
. (4.2)
 .
.
 .
. . (4.3)
. (4.3) . (4.4)
. (4.4) , (4.5)
, (4.5) .
. , (4.6)
, (4.6) - матрица-строка коэффициентов обратных связей по внутренним координатам объекта.
- матрица-строка коэффициентов обратных связей по внутренним координатам объекта. (4.7)
(4.7) ,
, .
. . (4.8)
. (4.8) . (4.9)
. (4.9)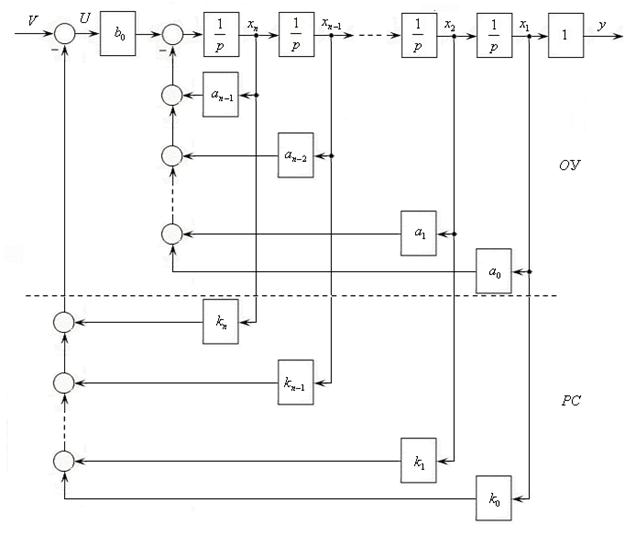
 , где i = 1,2 … n.
, где i = 1,2 … n.