Многозадачные ОС подразделяются на три типа в соответствии с использованными при их разработке критериями эффективности:
- системы пакетной обработки (например, OC EC),
- системы разделения времени (UNIX, VMS),
- системы реального времени (QNX, RT/11).
Системы пакетной обработкипредназначались для решения задач в основном вычислительного характера, не требующих быстрого получения результатов. Главной целью и критерием эффективности систем пакетной обработки является максимальная пропускная способность, то есть решение максимального числа задач в единицу времени.
Системы разделения временипризваны исправить основной недостаток систем пакетной обработки - изоляцию пользователя-программиста от процесса выполнения его задач. Каждому пользователю системы разделения времени предоставляется терминал, с которого он может вести диалог со своей программой. Так как в системах разделения времени каждой задаче выделяется только квант процессорного времени, ни одна задача не занимает процессор надолго, и время ответа оказывается приемлемым. Критерием эффективности систем разделения времени является не максимальная пропускная способность, а удобство и эффективность работы пользователя.
Системы реального времениприменяются для управления различными техническими объектами (например, станок, спутник, научная экспериментальная установка) или технологическими процессами (например, гальваническая линия, доменный процесс и т.п.). Во всех этих случаях существует предельно допустимое время, в течение которого должна быть выполнена та или иная программа, управляющая объектом. Таким образом, критерием эффективности для систем реального времени является их способность выдерживать заранее заданные интервалы времени между запуском программы и получением результата (управляющего воздействия).
При описании операционной системы часто указываются особенности ее структурной организации и основные концепции, положенные в ее основу.
К таким базовым концепциям относятся:
- Способы построения ядра системы - монолитное ядро или микроядерный подход. Большинство ОС использует монолитное ядро, которое компонуется как одна программа, работающая в привилегированном режиме и использующая быстрые переходы с одной процедуры на другую, не требующие переключения из привилегированного режима в пользовательский и наоборот. Альтернативой является построение ОС на базе микроядра, работающего также в привилегированном режиме и выполняющего только минимум функций по управлению аппаратурой, в то время как функции ОС более высокого уровня выполняют специализированные компоненты ОС - серверы, работающие в пользовательском режиме.
- Построение ОС на базе объектно-ориентированного подхода дает возможность использовать все его достоинства, хорошо зарекомендовавшие себя на уровне приложений, внутри операционной системы, а именно: аккумуляцию удачных решений в форме стандартных объектов, возможность создания новых объектов на базе имеющихся с помощью механизма наследования, хорошую защиту данных за счет их инкапсуляции во внутренние структуры объекта, что делает данные недоступными для несанкционированного использования извне, структуризованность системы, состоящей из набора хорошо определенных объектов.
- Концепция множественных прикладных сред наиболее просто реализуется в ОС на базе микроядра, над которым работают различные серверы, часть которых реализуют прикладную среду той или иной операционной системы. Наличие нескольких прикладных сред дает возможность в рамках одной ОС одновременно выполнять приложения, разработанные для нескольких ОС.
- Распределенная организация операционной системы позволяет упростить работу пользователей и программистов в сетевых средах. В распределенной ОС реализованы механизмы, которые дают возможность пользователю представлять и воспринимать сеть в виде традиционного однопроцессорного компьютера.
ЛЕКЦИЯ 2. ПРОЦЕССЫ
Фундаментальным понятием для изучения работы операционных систем является понятие процессов как основных динамических объектов, над которыми системы выполняют определенные действия.
2.1. Понятие процесса
Поясняя понятие "операционная система" и описывая способы построения операционных систем, часто применяют слова "программа" и "задание". Говорят: вычислительная система исполняет одну или несколько программ, операционная система планирует задания, программы могут обмениваться данными и т.д. При этом одни и те же слова обозначают и объекты в статическом состоянии, не обрабатывающиеся вычислительной системой (например, совокупность файлов на диске), и объекты в динамическом состоянии, находящиеся в процессе исполнения. Это возможно, пока речь идет об общих свойствах операционных систем, не вдаваясь в подробности их внутреннего устройства и поведения, или о работе вычислительных систем первого-второго поколений, которые не могли обрабатывать более одной программы или одного задания одновременно, по сути дела не имея операционных систем. Однако при рассмотрении современных компьютерных систем необходимо уточнить терминологию.
Термины "программа" и "задание" предназначены для описания статических, неактивных объектов. Программа же в процессе исполнения является динамическим, активным объектом. По ходу ее работы компьютер обрабатывает различные команды и преобразует значения переменных. Для выполнения программы операционная система должна выделить определенное количество оперативной памяти, закрепить за ней определенные устройства ввода-вывода или файлы (откуда должны поступать входные данные и куда нужно доставить полученные результаты), то есть зарезервировать определенные ресурсы из общего числа ресурсов всей вычислительной системы. Их количество и конфигурация с течением времени могут изменяться. Для описания таких активных объектов внутри компьютерной системы вместо терминов "программа" и "задание" используется термин – "процесс".
Понятие процесса характеризует некоторую совокупность набора исполняющихся команд, ассоциированных с ним ресурсов (выделенная для исполнения память или адресное пространство, стеки, используемые файлы и устройства ввода-вывода и т.д.) и текущего момента его выполнения (значения регистров, программного счетчика, состояние стека и значения переменных), находящуюся под управлением операционной системы. Не существует взаимно-однозначного соответствия между процессами и программами, обрабатываемыми вычислительными системами. В некоторых операционных системах для работы определенных программ может организовываться более одного процесса или один и тот же процесс может исполнять последовательно несколько различных программ. Более того, даже в случае обработки только одной программы в рамках одного процесса нельзя считать, что процесс представляет собой просто динамическое описание кода исполняемого файла, данных и выделенных для них ресурсов. Процесс находится под управлением операционной системы, поэтому в нем может выполняться часть кода ее ядра (не находящегося в исполняемом файле!), как в случаях, специально запланированных авторами программы (например, при использовании системных вызовов), так и в непредусмотренных ситуациях (например, при обработке внешних прерываний).
2.2. Состояния процесса
При использовании такой абстракции все, что выполняется в вычислительных системах (не только программы пользователей, но и, возможно, определенные части операционных систем), организовано как набор процессов. Понятно, что реально на однопроцессорной компьютерной системе в каждый момент времени может исполняться только один процесс. Для мультипрограммных вычислительных систем псевдопараллельная обработка нескольких процессов достигается с помощью переключения процессора с одного процесса на другой. Пока один процесс выполняется, остальные ждут своей очереди.
Как видим, каждый процесс может находиться как минимум в двух состояниях: процесс исполняетсяи процесс не исполняется. Диаграмма состояний процесса в такой модели изображена на рис.2.1.
Рис. 2.1. Простейшая диаграмма состояний процесса
Процесс, находящийся в состоянии процесс исполняется, через некоторое время может быть завершен операционной системой (или приостановлен) и снова переведен в состояние процесс не исполняется. Приостановка процесса происходит по двум причинам: для его дальнейшей работы потребовалось какое-либо событие (например, завершение операции ввода-вывода) или истек временной интервал, отведенный операционной системой для работы данного процесса. После этого операционная система по определенному алгоритму выбирает для исполнения один из процессов, находящихся в состоянии процесс не исполняется, и переводит его в состояние процесс исполняется. Новый процесс, появляющийся в системе, первоначально помещается в состояние процесс не исполняется.
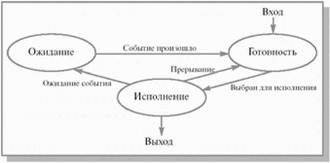
Это очень грубая модель, она не учитывает, в частности, то, что процесс, выбранный для исполнения, может все еще ждать события, из-за которого он был приостановлен, и реально к выполнению не готов. Для того чтобы избежать такой ситуации, разобьем состояние процесс не исполняется на два новых состояния: готовностьи ожидание(рис.2.2).
Рис. 2.2. Более подробная диаграмма состояний процесса
Всякий новый процесс, появляющийся в системе, попадает в состояние готовность. Операционная система, пользуясь каким-либо алгоритмом планирования, выбирает один из готовых процессов и переводит его в состояние исполнение. В состоянии исполнениепроисходит непосредственное выполнение программного кода процесса. Выйти из этого состояния процесс может по трем причинам:
- операционная система прекращает его деятельность;
- он не может продолжать свою работу, пока не произойдет некоторое событие, и операционная система переводит его в состояние ожидание;
- в результате возникновения прерывания в вычислительной системе (например, прерывания от таймера по истечении предусмотренного времени выполнения) его возвращают в состояние готовность.
Из состояния ожидание процесс попадает в состояние готовностьпосле того, как ожидаемое событие произошло, и он снова может быть выбран для исполнения.
Наша новая модель хорошо описывает поведение процессов во время их существования, но она не акцентирует внимания на появлении процесса в системе и его исчезновении. Для полноты картины нам необходимо ввести еще два состояния процессов: рождениеи закончил исполнение(рис. 2.3).
Рис. 2.3. Диаграмма состояний процесса
Теперь для появления в вычислительной системе процесс должен пройти через состояние рождение. При рождении процесс получает в свое распоряжение адресное пространство, в которое загружается программный код процесса; ему выделяются стек и системные ресурсы; устанавливается начальное значение программного счетчика этого процесса и т.д. Родившийся процесс переводится в состояние готовность. При завершении своей деятельности процесс из состояния исполнениепопадает в состояние закончил исполнение.
В конкретных операционных системах состояния процесса могут быть еще более детализированы, могут появиться некоторые новые варианты переходов из одного состояния в другое. Так, например, модель состояний процессов для операционной системы Windows NT содержит 7 различных состояний, а для операционной системы Unix – 9. Тем не менее, так или иначе, все операционные системы подчиняются изложенной выше модели.
2.3. Операции над процессами и связанные с ними понятия. Набор операций
Процесс не может перейти из одного состояния в другое самостоятельно. Изменением состояния процессов занимается операционная система, совершая операции над ними. Количество таких операций в нашей модели пока совпадает с количеством стрелок на диаграмме состояний. Удобно объединить их в три пары:
- создание процесса – завершение процесса;
- приостановка процесса (перевод из состояния исполнениев состояние готовность) – запуск процесса (перевод из состояния готовностьв состояние исполнение);
- блокирование процесса (перевод из состояния исполнениев состояние ожидание) – разблокирование процесса (перевод из состояния ожиданиев состояние готовность).
В дальнейшем, когда мы будем говорить об алгоритмах планирования, в нашей модели появится еще одна операция, не имеющая парной: изменение приоритета процесса.
Операции создания и завершения процесса являются одноразовыми, так как применяются к процессу не более одного раза (некоторые системные процессы при работе вычислительной системы не завершаются никогда). Все остальные операции, связанные с изменением состояния процессов, будь то запуск или блокировка, как правило, являются многоразовыми. Рассмотрим подробнее, как операционная система выполняет операции над процессами.
2.4. Process Control Block и контекст процесса
Для того чтобы операционная система могла выполнять операции над процессами, каждый процесс представляется в ней некоторой структурой данных. Эта структура содержит информацию, специфическую для данного процесса:
- состояние, в котором находится процесс;
- программный счетчик процесса или, другими словами, адрес команды, которая должна быть выполнена для него следующей;
- содержимое регистров процессора;
- данные, необходимые для планирования использования процессора и управления памятью (приоритет процесса, размер и расположение адресного пространства и т.д.);
- учетные данные (идентификационный номер процесса, какой пользователь инициировал его работу, общее время использования процессора данным процессом и т.д.);
- сведения об устройствах ввода-вывода, связанных с процессом (например, какие устройства закреплены за процессом, таблицу открытых файлов).
Ее состав и строение зависят, конечно, от конкретной операционной системы. Во многих операционных системах информация, характеризующая процесс, хранится не в одной, а в нескольких связанных структурах данных. Эти структуры могут иметь различные наименования, содержать дополнительную информацию или, наоборот, лишь часть описанной информации. Для нас это не имеет значения. Для нас важно лишь то, что для любого процесса, находящегося в вычислительной системе, вся информация, необходимая для совершения операций над ним, доступна операционной системе. Для простоты изложения будем считать, что она хранится в одной структуре данных. Мы будем называть ее PCB (Process Control Block) или блоком управления процессом. Блок управления процессом является моделью процесса для операционной системы. Любая операция, производимая операционной системой над процессом, вызывает определенные изменения в PCB. В рамках принятой модели состояний процессов содержимое PCB между операциями остается постоянным.
Информацию, для хранения которой предназначен блок управления процессом, удобно для дальнейшего изложения разделить на две части. Содержимое всех регистров процессора (включая значение программного счетчика) будем называть регистровым контекстом процесса, а все остальное – системным контекстом процесса. Знания регистрового и системного контекстов процесса достаточно для того, чтобы управлять его работой в операционной системе, совершая над ним операции. Однако этого недостаточно для того, чтобы полностью охарактеризовать процесс. Операционную систему не интересует, какими именно вычислениями занимается процесс, т.е. какой код и какие данные находятся в его адресном пространстве. С точки зрения пользователя, наоборот, наибольший интерес представляет содержимое адресного пространства процесса, возможно, наряду с регистровым контекстом определяющее последовательность преобразования данных и полученные результаты. Код и данные, находящиеся в адресном пространстве процесса, будем называть его пользовательским контекстом. Совокупность регистрового, системного и пользовательского контекстов процесса для краткости принято называть просто контекстом процесса. В любой момент времени процесс полностью характеризуется своим контекстом.
2.5. Одноразовые операции
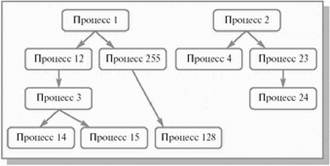
Сложный жизненный путь процесса в компьютере начинается с его рождения. Любая операционная система, поддерживающая концепцию процессов, должна обладать средствами для их создания. В очень простых системах (например, в системах, спроектированных для работы только одного конкретного приложения) все процессы могут быть порождены на этапе старта системы. Более сложные операционные системы создают процессы динамически, по мере необходимости. Инициатором рождения нового процесса после старта операционной системы может выступить либо процесс пользователя, совершивший специальный системный вызов, либо сама операционная система, то есть, в конечном итоге, тоже некоторый процесс. Процесс, инициировавший создание нового процесса, принято называть процессом-родителем (parent process), а вновь созданный процесс – процессом-ребенком (child process). Процессы-дети могут в свою очередь порождать новых детей и т. д., образуя, в общем случае, внутри системы набор генеалогических деревьев процессов – генеалогический лес. Пример генеалогического леса изображен на рис.2.4. Следует отметить, что все пользовательские процессы вместе с некоторыми процессами операционной системы принадлежат одному и тому же дереву леса. В ряде вычислительных систем лес вообще вырождается в одно такое дерево.
Рис. 2.4. Упрощенный генеалогический лес процессов. Стрелочка означает отношение родитель-ребенок
При рождении процесса система заводит новый PCB с состоянием процесса рождение и начинает его заполнять. Новый процесс получает собственный уникальный идентификационный номер. Поскольку для хранения идентификационного номера процесса в операционной системе отводится ограниченное количество битов, для соблюдения уникальности номеров количество одновременно присутствующих в ней процессов должно быть ограничено. После завершения какого-либо процесса его освободившийся идентификационный номер может быть повторно использован для другого процесса.
Обычно для выполнения своих функций процесс-ребенок требует определенных ресурсов: памяти, файлов, устройств ввода-вывода и т.д. Существует два подхода к их выделению. Новый процесс может получить в свое распоряжение некоторую часть родительских ресурсов, возможно разделяя с процессом-родителем и другими процессами-детьми права на них, или может получить свои ресурсы непосредственно от операционной системы. Информация о выделенных ресурсах заносится в PCB.
После наделения процесса-ребенка ресурсами необходимо занести в его адресное пространство программный код, значения данных, установить программный счетчик. Здесь также возможны два решения. В первом случае процесс-ребенок становится дубликатом процесса-родителя по регистровому и пользовательскому контекстам, при этом должен существовать способ определения, кто для кого из процессов-двойников является родителем. Во втором случае процесс-ребенок загружается новой программой из какого-либо файла. Операционная система Unix разрешает порождение процесса только первым способом; для запуска новой программы необходимо сначала создать копию процесса-родителя, а затем процесс-ребенок должен заменить свой пользовательский контекст с помощью специального системного вызова. Операционная система VAX/VMS допускает только второе решение. В MS Windows возможны оба варианта (в различных API).
Порождение нового процесса как дубликата процесса-родителя приводит к возможности существования программ (т. е. исполняемых файлов), для работы которых организуется более одного процесса. Возможность замены пользовательского контекста процесса по ходу его работы (т.е. загрузки для исполнения новой программы) приводит к тому, что в рамках одного и того же процесса может последовательно выполняться несколько различных программ.
После того как процесс наделен содержанием, в PCB дописывается оставшаяся информация, и состояние нового процесса изменяется на готовность. Осталось сказать несколько слов о том, как ведут себя процессы-родители после рождения процессов-детей. Процесс-родитель может продолжать свое выполнение одновременно с выполнением процесса-ребенка, а может ожидать завершения работы некоторых или всех своих "детей".
Мы не будем подробно останавливаться на причинах, которые могут привести к завершению жизненного цикла процесса. После того как процесс завершил свою работу, операционная система переводит его в состояние закончил исполнениеи освобождает все ассоциированные с ним ресурсы, делая соответствующие записи в блоке управления процессом. При этом сам PCB не уничтожается, а остается в системе еще некоторое время. Это связано с тем, что процесс-родитель после завершения процесса-ребенка может запросить операционную систему о причине "смерти" порожденного им процесса и/или статистическую информацию о его работе. Подобная информация сохраняется в PCB отработавшего процесса до запроса процесса-родителя или до конца его деятельности, после чего все следы завершившегося процесса окончательно исчезают из системы. В операционной системе Unix процессы, находящиеся в состоянии закончил исполнение, принято называть процессами-зомби.
Следует заметить, что в ряде операционных систем (например, в VAX/VMS) гибель процесса-родителя приводит к завершению работы всех его "детей". В других операционных системах (например, в Unix) процессы-дети продолжают свое существование и после окончания работы процесса-родителя. При этом возникает необходимость изменения информации в PCB процессов-детей о породившем их процессе для того, чтобы генеалогический лес процессов оставался целостным. Рассмотрим следующий пример. Пусть процесс с номером 2515 был порожден процессом с номером 2001 и после завершения его работы остается в вычислительной системе неограниченно долго. Тогда не исключено, что номер 2001 будет использован операционной системой повторно для совсем другого процесса. Если не изменить информацию о процессе-родителе для процесса 2515, то генеалогический лес процессов окажется некорректным – процесс 2515 будет считать своим родителем новый процесс 2001, а процесс 2001 будет открещиваться от нежданного потомка. Как правило, "осиротевшие" процессы "усыновляются" одним из системных процессов, который порождается при старте операционной системы и функционирует все время, пока она работает.
2.6. Многоразовые операции
Одноразовые операции приводят к изменению количества процессов, находящихся под управлением операционной системы, и всегда связаны с выделением или освобождением определенных ресурсов. Многоразовые операции, напротив, не приводят к изменению количества процессов в операционной системе и не обязаны быть связанными с выделением или освобождением ресурсов.
В этом разделе мы кратко опишем действия, которые производит операционная система при выполнении многоразовых операций над процессами. Более подробно эти действия будут рассмотрены далее.
Запуск процесса. Из числа процессов, находящихся в состоянии готовность, операционная система выбирает один процесс для последующего исполнения. Критерии и алгоритмы такого выбора будут подробно рассмотрены в разделе, посвященном планированию процессов. Для избранного процесса операционная система обеспечивает наличие в оперативной памяти информации, необходимой для его дальнейшего выполнения. То, как она это делает, будет в деталях описано ниже. Далее состояние процесса изменяется на исполнение, восстанавливаются значения регистров для данного процесса и управление передается команде, на которую указывает счетчик команд процесса. Все данные, необходимые для восстановления контекста, извлекаются из PCB процесса, над которым совершается операция.
Приостановка процесса. Работа процесса, находящегося в состоянии исполнение, приостанавливается в результате какого-либо прерывания. Процессор автоматически сохраняет счетчик команд и, возможно, один или несколько регистров в стеке исполняемого процесса, а затем передает управление по специальному адресу обработки данного прерывания. На этом деятельность hardware по обработке прерывания завершается. По указанному адресу обычно располагается одна из частей операционной системы. Она сохраняет динамическую часть системного и регистрового контекстов процесса в его PCB, переводит процесс в состояние готовностьи приступает к обработке прерывания, то есть к выполнению определенных действий, связанных с возникшим прерыванием.
Блокирование процесса. Процесс блокируется, когда он не может продолжать работу, не дождавшись возникновения какого-либо события в вычислительной системе. Для этого он обращается к операционной системе с помощью определенного системного вызова. Операционная система обрабатывает системный вызов (инициализирует операцию ввода-вывода, добавляет процесс в очередь процессов, дожидающихся освобождения устройства или возникновения события, и т.д.) и, при необходимости сохранив нужную часть контекста процесса в его PCB, переводит процесс из состояния исполнениев состояние ожидание.
Разблокирование процесса. После возникновения в системе какого-либо события операционной системе нужно точно определить, какое именно событие произошло. Затем операционная система проверяет, находился ли некоторый процесс в состоянии ожиданиедля данного события, и если находился, переводит его в состояние готовность, выполняя необходимые действия, связанные с наступлением события (инициализация операции ввода-вывода для очередного ожидающего процесса и т.п.).
2.7. Переключение контекста
До сих пор мы рассматривали операции над процессами изолированно, независимо друг от друга. В действительности же деятельность мультипрограммной операционной системы состоит из цепочек операций, выполняемых над различными процессами, и сопровождается переключением процессора с одного процесса на другой.
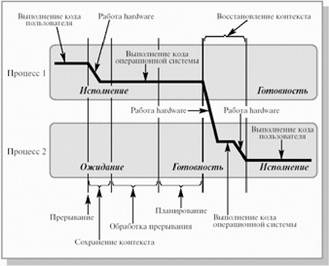
Давайте для примера упрощенно рассмотрим, как в реальности может протекать операция разблокирования процесса, ожидающего ввода-вывода (рис.2.5). При исполнении процессором некоторого процесса (на рисунке – процесс 1) возникает прерывание от устройства ввода-вывода, сигнализирующее об окончании операций на устройстве. Над выполняющимся процессом производится операция приостановки. Далее операционная система разблокирует процесс, инициировавший запрос на ввод-вывод (на рисунке – процесс 2) и осуществляет запуск приостановленного или нового процесса, выбранного при выполнении планирования (на рисунке был выбран разблокированный процесс). Как мы видим, в результате обработки информации об окончании операции ввода-вывода возможна смена процесса, находящегося в состоянии исполнение.
Рис. 2.5. Выполнение операции разблокирования процесса.
Для корректного переключения процессора с одного процесса на другой необходимо сохранить контекст исполнявшегося процесса и восстановить контекст процесса, на который будет переключен процессор. Такая процедура сохранения/восстановления работоспособности процессов называется переключением контекста. Время, затраченное на переключение контекста, не используется вычислительной системой для совершения полезной работы и представляет собой накладные расходы, снижающие производительность системы. Оно меняется от машины к машине и обычно колеблется в диапазоне от 1 до 1000 микросекунд. Существенно сократить накладные расходы в современных операционных системах позволяет расширенная модель процессов, включающая в себя понятие threads of execution (нити исполнения или просто нити). Подробнее о нитях исполнения мы будем говорить в лекции 4.
2.8. Выводы по лекции 2
Понятие процесса характеризует некоторую совокупность набора исполняющихся команд, ассоциированных с ним ресурсов и текущего момента его выполнения, находящуюся под управлением операционной системы. В любой момент процесс полностью описывается своим контекстом, состоящим из регистровой, системной и пользовательской частей. В операционной системе процессы представляются определенной структурой данных – PCB, отражающей содержание регистрового и системного контекстов. Процессы могут находиться в пяти основных состояниях: рождение, готовность, исполнение, ожидание, закончил исполнение. Из состояния в состояние процесс переводится операционной системой в результате выполнения над ним операций. Операционная система может выполнять над процессами следующие операции: создание процесса, завершение процесса, приостановка процесса, запуск процесса, блокирование процесса, разблокирование процесса, изменение приоритета процесса. Между операциями содержимое PCB не изменяется. Деятельность мультипрограммной операционной системы состоит из цепочек перечисленных операций, выполняемых над различными процессами, и сопровождается процедурами сохранения/восстановления работоспособности процессов, т.е. переключением контекста. Переключение контекста не имеет отношения к полезной работе, выполняемой процессами, и время, затраченное на него, сокращает полезное время работы процессора.
ЛЕКЦИЯ 3. ПЛАНИРОВАНИЕ ПРОЦЕССОВ
3.1. Уровни планирования
Исторически сложилось два вида планирования в вычислительных системах: планировании заданий и планировании использования процессора. Планирование заданий появилось в пакетных системах после того, как для хранения сформированных пакетов заданий начали использоваться магнитные диски. Магнитные диски, являясь устройствами прямого доступа, позволяют загружать задания в компьютер в произвольном порядке, а не только в том, в котором они были записаны на диск. Изменяя порядок загрузки заданий в вычислительную систему, можно повысить эффективность ее использования. Процедуру выбора очередного задания для загрузки в машину (т.е. для порождения соответствующего процесса) мы и назвали планированием заданий. Планирование использования процессора впервые возникает в мультипрограммных вычислительных системах, где в состоянии готовность могут одновременно находиться несколько процессов. Именно для процедуры выбора из них одного процесса, который получит процессор в свое распоряжение, т.е. будет переведен в состояние исполнение, мы использовали это словосочетание. Теперь, познакомившись с концепцией процессов в вычислительных системах, оба вида планирования мы будем рассматривать как различные уровни планирования процессов.
Планирование заданий используется в качестве долгосрочного планирования процессов. Оно отвечает за порождение новых процессов в системе, определяя ее степень мультипрограммирования, т.е. количество процессов, одновременно находящихся в ней. Если степень мультипрограммирования системы поддерживается постоянной, т.е. среднее количество процессов в компьютере не меняется, то новые процессы могут появляться только после завершения ранее загруженных. Поэтому долгосрочное планирование осуществляется достаточно редко, между появлением новых процессов могут проходить минуты и даже десятки минут. Решение о выборе для запуска того или иного процесса оказывает влияние на функционирование вычислительной системы на протяжении достаточно длительного времени. Отсюда и название этого уровня планирования – долгосрочное. В некоторых операционных системах долгосрочное планирование сведено к минимуму или отсутствует вовсе. Так, например, во многих интерактивных системах разделения времени порождение процесса происходит сразу после появления соответствующего запроса. Поддержание разумной степени мультипрограммирования осуществляется за счет ограничения количества пользователей, которые могут работать в системе, и особенностей человеческой психологии. Если между нажатием на клавишу и появлением символа на экране проходит 20–30 секунд, то многие пользователи предпочтут прекратить работу и продолжить ее, когда система будет менее загружена.
Планирование использования процессора применяется в качестве краткосрочного планирования процессов. Оно проводится, к примеру, при обращении исполняющегося процесса к устройствам ввода-вывода или просто по завершении определенного интервала времени. Поэтому краткосрочное планирование осуществляется, как правило, не реже одного раза в 100 миллисекунд. Выбор нового процесса для исполнения оказывает влияние на функционирование системы до наступления очередного аналогичного события, т.е. в течение короткого промежутка времени, чем и обусловлено название этого уровня планирования – краткосрочное.
В некоторых вычислительных системах бывает выгодно для повышения производительности временно удалить какой-либо частично выполнившийся процесс из оперативной памяти на диск, а позже вернуть его обратно для дальнейшего выполнения. Такая процедура в англоязычной литературе получила название swapping, что можно перевести на русский язык как "перекачка", хотя в специальной литературе оно употребляется без перевода – свопинг. Когда и какой из процессов нужно перекачать на диск и вернуть обратно, решается дополнительным промежуточным уровнем планирования процессов – среднесрочным.
3.2. Критерии планирования и требования к алгоритмам
Для каждого уровня планирования процессов можно предложить много различных алгоритмов. Выбор конкретного алгоритма определяется классом задач, решаемых вычислительной системой, и целями, которых мы хотим достичь, используя планирование. К числу таких целей можно отнести следующие:
- Справедливость - гарантировать каждому заданию или процессу определенную часть времени использования процессора в компьютерной системе, стараясь не допустить возникновения ситуации, когда процесс одного пользователя постоянно занимает процессор, в то время как процесс другого пользователя фактически не начинал выполняться.
- Эффективность – постараться занять процессор на все 100% рабочего времени, не позволяя ему простаивать в ожидании процессов, готовых к исполнению. В реальных вычислительных системах загрузка процессора колеблется от 40 до 90%.
- Сокращение полного времени выполнения (turnaround time) - обеспечить минимальное время между стартом процесса или постановкой задания в очередь для загрузки и его завершением.
- Сокращение времени ожидания (waiting time) – сократить время, которое проводят процессы в состоянии готовность и задания в очереди для загрузки.
- Сокращение времени отклика (response time) – минимизировать время, которое требуется процессу в интерактивных системах для ответа на запрос пользователя.
Независимо от поставленных целей планирования желательно также, чтобы алгоритмы обладали следующими свойствами:
- Были предсказуемыми. Одно и то же задание должно выполняться приблизительно за одно и то же время. Например, применение алгоритма планирования не должно приводить к извлечению квадратного корня из 4 за сотые доли секунды при одном запуске и за несколько суток – при втором запуске.
- Были связаны с минимальными накладными расходами. Если на каждые 100 миллисекунд, выделенные процессу для использования процессора, будет приходиться 200 миллисекунд на определение того, какой именно процесс получит процессор в свое распоряжение, и на переключение контекста, то такой алгоритм, очевидно, применять не стоит.
- Равномерно загружали ресурсы вычислительной системы, отдавая предпочтение тем процессам, которые будут занимать малоиспользуемые ресурсы.
- Обладали масштабируемостью, т.е. не сразу теряли работоспособность при увеличении нагрузки. Например, рост количества процессов в системе в два раза не должен приводить к увеличению полного времени выполнения процессов на порядок.
Многие из приведенных выше целей и свойств являются противоречивыми. Улучшая работу алгоритма с точки зрения одного критерия, мы ухудшаем ее с точки зрения другого. Приспосабливая алгоритм под один класс задач, мы тем самым дискриминируем задачи другого класса. "В одну телегу впрячь не можно коня и трепетную лань". Ничего не поделаешь. Такова жизнь.
3.3. Параметры планирования
Для осуществления поставленных целей разумные алгоритмы планирования должны опираться на какие-либо характеристики процессов в системе, заданий в очереди на загрузку, состояния самой вычислительной системы, иными словами, на параметры планирования. В этом разделе мы опишем ряд таких параметров, не претендуя на полноту изложения.
Все параметры планирования можно разбить на две большие группы: статические параметры и динамические параметры. Статические параметры не изменяются в ходе функционирования вычислительной системы, динамические же, напротив, подвержены постоянным изменениям.
К статическим параметрам вычислительной системы можно отнести предельные значения ее ресурсов (размер оперативной памяти, максимальное количество памяти на диске для осуществления свопинга, количество подключенных устройств ввода-вывода и т.п.). Динамические параметры системы описывают количество свободных ресурсов на данный момент.
К статическим параметрам процессов относятся характеристики, как правило, присущие заданиям уже на этапе загрузки.
- Каким пользователем запущен процесс или сформировано задание.
- Насколько важной является поставленная задача, т.е. каков приоритет ее выполнения.
- Сколько процессорного времени запрошено пользователем для решения задачи.
- Каково соотношение процессорного времени и времени, необходимого для осуществления операций ввода-вывода.
- Какие ресурсы вычислительной системы (оперативная память, устройства ввода-вывода, специальные библиотеки и системные программы и т.д.) и в каком количестве необходимы заданию.
Алгоритмы долгосрочного планирования используют в своей работе статические и динамические параметры вычислительной системы и статические параметры процессов (динамические параметры процессов на этапе загрузки заданий еще не известны). Алгоритмы краткосрочного и среднесрочного планирования дополнительно учитывают и динамические характеристики процессов. Для среднесрочного планирования в качестве таких характеристик может использоваться следующая информация:
- сколько времени прошло с момента выгрузки процесса на диск или его загрузки в оперативную память;
- сколько оперативной памяти занимает процесс;
- сколько процессорного времени уже предоставлено процессу.
Рис. 3.1. Фрагмент деятельности процесса с выделением промежутков непрерывного использования процессора и ожидания ввода-вывода
Для краткосрочного планирования нам понадобится ввести еще два динамических параметра. Деятельность любого процесса можно представить как последовательность циклов использования процессора и ожидания завершения операций ввода-вывода. Промежуток времени непрерывного использования процессора носит название CPU burst, а промежуток времени непрерывного ожидания ввода-вывода – I/O burst. На рис. 3.1 показан фрагмент деятельности некоторого процесса на псевдоязыке программирования с выделением указанных промежутков. Для краткости мы будем использовать термины CPU burst и I/O burst без перевода. Значения продолжительности последних и очередных CPU burst и I/O burst являются важными динамическими параметрами процесса.
3.4. Вытесняющее и невытесняющее планирование
Процесс планирования осуществляется частью операционной системы, называемой планировщиком. Планировщик может принимать решения о выборе для исполнения нового процесса из числа находящихся в состоянии готовность в следующих четырех случаях.
1. Когда процесс переводится из состояния исполнение в состояние закончил исполнение.
2. Когда процесс переводится из состояния исполнение в состояние ожидание.
3. Когда процесс переводится из состояния исполнение в состояние готовность (например, после прерывания от таймера).
4. Когда процесс переводится из состояния ожидание в состояние готовность (завершилась операция ввода-вывода или произошло другое событие).
В случаях 1 и 2 процесс, находившийся в состоянии исполнение, не может дальше исполняться, и операционная система вынуждена осуществлять планирование, выбирая новый процесс для выполнения. В случаях 3 и 4 планирование может как проводиться, так и не проводиться, планировщик не вынужден обязательно принимать решение о выборе процесса для выполнения, процесс, находившийся в состоянии исполнение может просто продолжить свою работу. Если в операционной системе планирование осуществляется только в вынужденных ситуациях, говорят, что имеет место невытесняющее (nonpreemptive) планирование. Если планировщик принимает и вынужденные, и невынужденные решения, говорят о вытесняющем (preemptive) планировании. Термин "вытесняющее планирование" возник потому, что исполняющийся процесс помимо своей воли может быть вытеснен из состояния исполнение другим процессом.
Невытесняющее планирование используется, например, в MS Windows 3.1 и ОС Apple Macintosh ранних версий. При таком режиме планирования процесс занимает столько процессорного времени, сколько ему необходимо. При этом переключение процессов возникает только при желании самого исполняющегося процесса передать управление (для ожидания завершения операции ввода-вывода или по окончании работы). Этот метод планирования относительно просто реализуем и достаточно эффективен, так как позволяет выделить большую часть процессорного времени для работы самих процессов и до минимума сократить затраты на переключение контекста. Однако при невытесняющем планировании возникает проблема возможности полного захвата процессора одним процессом, который вследствие каких-либо причин (например, из-за ошибки в программе) зацикливается и не может передать управление другому процессу. В такой ситуации спасает только перезагрузка всей вычислительной системы.
Вытесняющее планирование обычно используется в системах разделения времени. В этом режиме планирования процесс может быть приостановлен в любой момент исполнения. Операционная система устанавливает специальный таймер для генерации сигнала прерывания по истечении некоторого интервала времени – кванта. После прерывания процессор передается в распоряжение следующего процесса. Временные прерывания помогают гарантировать приемлемое время отклика процессов для пользователей, работающих в диалоговом режиме, и предотвращают "зависание" компьютерной системы из-за зацикливания какой-либо программы.
3.5. Алгоритмы планирования
Существует достаточно большой набор разнообразных алгоритмов планирования, которые предназначены для достижения различных целей и эффективны для разных классов задач. Многие из них могут использоваться на нескольких уровнях планирования. В этом разделе мы рассмотрим некоторые наиболее употребительные алгоритмы применительно к процессу кратковременного планирования.
First-Come, First-Served (FCFS).Простейшим алгоритмом планирования является алгоритм, который принято обозначать аббревиатурой FCFS по первым буквам его английского названия – First-Come, First-Served (первым пришел, первым обслужен). Представим себе, что процессы, находящиеся в состоянии готовность, выстроены в очередь. Когда процесс переходит в состояние готовность, он, а точнее, ссылка на его PCB, помещается в конец этой очереди. Выбор нового процесса для исполнения осуществляется из начала очереди с удалением оттуда ссылки на его PCB. Очередь подобного типа имеет в программировании специальное наименование – FIFO, сокращение от First In, First Out (первым вошел, первым вышел).
Такой алгоритм выбора процесса осуществляет невытесняющее планирование. Процесс, получивший в свое распоряжение процессор, занимает его до истечения текущего CPU burst. После этого для выполнения выбирается новый процесс из начала очереди.
Как мы видим, среднее время ожидания и среднее полное время выполнения для этого алгоритма существенно зависят от порядка расположения процессов в очереди. Если у нас есть процесс с длительным CPU burst, то короткие процессы, перешедшие в состояние готовность после длительного процесса, будут очень долго ждать начала выполнения. Поэтому алгоритм FCFS практически неприменим для систем разделения времени – слишком большим получается среднее время отклика в интерактивных процессах.
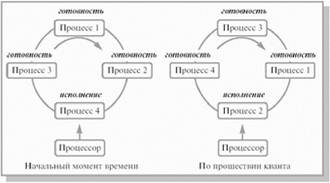
Round Robin (RR).Модификацией алгоритма FCFS является алгоритм, получивший название Round Robin (Round Robin – это вид детской карусели в США) или сокращенно RR. По сути дела, это тот же самый алгоритм, только реализованный в режиме вытесняющего планирования. Можно представить себе все множество готовых процессов организованным циклически – процессы сидят на карусели. Карусель вращается так, что каждый процесс находится около процессора небольшой фиксированный квант времени, обычно 10 – 100 миллисекунд (рис.3.2). Пока процесс находится рядом с процессором, он получает процессор в свое распоряжение и может исполняться.
Рис. 3.2. Процессы на карусели
Реализуется такой алгоритм так же, как и предыдущий, с помощью организации процессов, находящихся в состоянии готовность, в очередь FIFO. Планировщик выбирает для очередного исполнения процесс, расположенный в начале очереди, и устанавливает таймер для генерации прерывания по истечении определенного кванта времени. При выполнении процесса возможны два варианта.
- Время непрерывного использования процессора, необходимое процессу (остаток текущего CPU burst), меньше или равно продолжительности кванта времени. Тогда процесс по своей воле освобождает процессор до истечения кванта времени, на исполнение поступает новый процесс из начала очереди, и таймер начинает отсчет кванта заново.
- Продолжительность остатка текущего CPU burst процесса больше, чем квант времени. Тогда по истечении этого кванта процесс прерывается таймером и помещается в конец очереди процессов, готовых к исполнению, а процессор выделяется для использования процессу, находящемуся в ее начале.
При очень больших величинах кванта времени, когда каждый процесс успевает завершить свой CPU burst до возникновения прерывания по времени, алгоритм RR вырождается в алгоритм FCFS. При очень малых величинах создается иллюзия того, что каждый из n процессов работает на собственном виртуальном процессоре с производительностью ~ 1/n от производительности реального процессора. Правда, это справедливо лишь при теоретическом анализе при условии пренебрежения временами переключения контекста процессов. В реальных условиях при слишком малой величине кванта времени и, соответственно, слишком частом переключении контекста накладные расходы на переключение резко снижают производительность системы.
Shortest-Job-First (SJF).При рассмотрении алгоритмов FCFS и RR мы видели, насколько существенным для них является порядок расположения процессов в очереди процессов, готовых к исполнению. Если короткие задачи расположены в очереди ближе к ее началу, то общая производительность этих алгоритмов значительно возрастает. Если бы мы знали время следующих CPU burst для процессов, находящихся в состоянии готовность, то могли бы выбрать для исполнения не процесс из начала очереди, а процесс с минимальной длительностью CPU burst. Если же таких процессов два или больше, то для выбора одного из них можно использовать уже известный нам алгоритм FCFS. Квантование времени при этом не применяется. Описанный алгоритм получил название "кратчайшая работа первой" или Shortest Job First (SJF).
SJF-алгоритм краткосрочного планирования может быть как вытесняющим, так и невытесняющим. При невытесняющем SJF-планировании процессор предоставляется избранному процессу на все необходимое ему время, независимо от событий, происходящих в вычислительной системе. При вытесняющем SJF-планировании учитывается появление новых процессов в очереди готовых к исполнению (из числа вновь родившихся или разблокированных) во время работы выбранного процесса. Если CPU burst нового процесса меньше, чем остаток CPU burst у исполняющегося, то исполняющийся процесс вытесняется новым.
3.5. Гарантированное планирование
При интерактивной работе N пользователей в вычислительной системе можно применить алгоритм планирования, который гарантирует, что каждый из пользователей будет иметь в своем распоряжении ~1/N часть процессорного времени. Пронумеруем всех пользователей от 1 до N. Для каждого пользователя с номером i введем две величины: T – время нахождения пользователя в i системе или, другими словами, длительность сеанса его общения с машиной и τ – суммарное i процессорное время уже выделенное всем его процессам в течение сеанса. Справедливым для пользователя было бы получение T /N процессорного времени. Если τ <<T /N ii, то i-й пользователь несправедливо обделен процессорным временем. Если же τ >>T /N ii, то система явно благоволит к пользователю с номером i. Вычислим для процессов каждого пользователя значение коэффициента справедливости τ N/T ii и будем предоставлять очередной квант времени готовому процессу с наименьшей величиной этого отношения. Предложенный алгоритм называют алгоритмом гарантированного планирования. К недостаткам этого алгоритма можно отнести невозможность предугадать поведение пользователей.
Если некоторый пользователь отправится на пару часов пообедать и поспать, не прерывая сеанса работы, то по возвращении его процессы будут получать неоправданно много процессорного времени.
3.6. Приоритетное планирование
Алгоритмы SJF и гарантированного планирования представляют собой частные случаи приоритетного планирования. При приоритетном планировании каждому процессу присваивается определенное числовое значение – приоритет, в соответствии с которым ему выделяется процессор. Процессы с одинаковыми приоритетами планируются в порядке FCFS. Для алгоритма SJF в качестве такого приоритета выступает оценка продолжительности следующего CPU burst. Чем меньше значение этой оценки, тем более высокий приоритет имеет процесс. Для алгоритма гарантированного планирования приоритетом служит вычисленный коэффициент справедливости. Чем он меньше, тем больше у процесса приоритет.
Алгоритмы назначения приоритетов процессов могут опираться как на внутренние параметры, связанные с происходящим внутри вычислительной системы, так и на внешние по отношению к ней. К внутренним параметрам относятся различные количественные и качественные характеристики процесса (например, ограничения по времени использования процессора, требования к размеру памяти, число открытых файлов и используемых устройств ввода-вывода, отношение средних продолжительностей I/O burst к CPU burst и т.д.). Алгоритмы SJF и гарантированного планирования используют внутренние параметры. В качестве внешних параметров могут выступать важность процесса для достижения каких-либо целей, стоимость оплаченного процессорного времени и другие политические факторы.
Планирование с использованием приоритетов может быть как вытесняющим, так и невытесняющим. При вытесняющем планировании процесс с более высоким приоритетом, появившийся в очереди готовых процессов, вытесняет исполняющийся процесс с более низким приоритетом. В случае невытесняющего планирования он просто становится в начало очереди готовых процессов.
Главная проблема приоритетного планирования заключается в том, что при ненадлежащем выборе механизма назначения и изменения приоритетов низкоприоритетные процессы могут не запускаться неопределенно долгое время. Решение этой проблемы может быть достигнуто с помощью увеличения со временем значения приоритета процесса, находящегося в состоянии готовность. Пусть изначально процессам присваиваются приоритеты от 128 до 255. Каждый раз по истечении определенного промежутка времени значения приоритетов готовых процессов уменьшаются на 1. Процессу, побывавшему в состоянии исполнение, присваивается первоначальное значение приоритета. Даже такая грубая схема гарантирует, что любому процессу в разумные сроки будет предоставлено право на исполнение.
Многоуровневые очереди (Multilevel Queue).Для систем, в которых процессы могут быть легко рассортированы по разным группам, был разработан другой класс алгоритмов планирования. Для каждой группы процессов создается своя очередь процессов, находящихся в состоянии готовность (рис.3.3). Этим очередям приписываются фиксированные приоритеты. Например, приоритет очереди системных процессов устанавливается выше, чем приоритет очередей пользовательских процессов. А приоритет очереди процессов, запущенных студентами, ниже, чем для очереди процессов, запущенных преподавателями. Это значит, что ни один пользовательский процесс не будет выбран для исполнения, пока есть хоть один готовый системный процесс, и ни один студенческий процесс не получит в свое распоряжение процессор, если есть процессы преподавателей, готовые к исполнению. Внутри этих очередей для планирования могут применяться самые разные алгоритмы. Так, например, для больших счетных процессов, не требующих взаимодействия с пользователем (фоновых процессов), может использоваться алгоритм FCFS, а для интерактивных процессов – алгоритм RR. Подобный подход, получивший название многоуровневых очередей, повышает гибкость планирования: для процессов с различными характеристиками применяется наиболее подходящий им алгоритм.
Рис. 3.3. Несколько очередей планирования
Многоуровневые очереди с обратной связью (Multilevel Feedback Queue).Дальнейшим развитием алгоритма многоуровневых очередей является добавление к нему механизма обратной связи. Здесь процесс не постоянно приписан к определенной очереди, а может мигрировать из одной очереди в другую в зависимости от своего поведения.
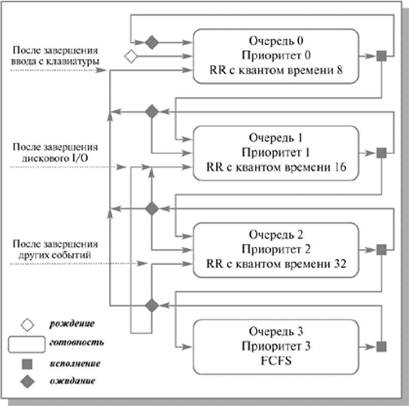
Для простоты рассмотрим ситуацию, когда процессы в состоянии готовность организованы в 4 очереди, как на рис.3.4. Планирование процессов между очередями осуществляется на основе вытесняющего приоритетного механизма. Чем выше на рисунке располагается очередь, тем выше ее приоритет. Процессы в очереди 1 не могут исполняться, если в очереди 0 есть хотя бы один процесс. Процессы в очереди 2 не будут выбраны для выполнения, пока есть хоть один процесс в очередях 0 и 1. И наконец, процесс в очереди 3 может получить процессор в свое распоряжение только тогда, когда очереди 0, 1 и 2 пусты. Если при работе процесса появляется другой процесс в какой-либо более приоритетной очереди, исполняющийся процесс вытесняется новым. Планирование процессов внутри очередей 0–2 осуществляется с использованием алгоритма RR, планирование процессов в очереди 3 основывается на алгоритме FCFS.
Рис. 3.4. Схема миграции процессов в многоуровневых очередях планирования с обратной связью. Вытеснение процессов более приоритетными процессами и завершение процессов на схеме не показано
Родившийся процесс поступает в очередь 0. При выборе на исполнение он получает в свое распоряжение квант времени размером 8 единиц. Если продолжительность его CPU burst меньше этого кванта времени, процесс остается в очереди 0. В противном случае он переходит в очередь 1. Для процессов из очереди 1 квант времени имеет величину 16. Если процесс не укладывается в это время, он переходит в очередь 2. Если укладывается – остается в очереди 1. В очереди 2 величина кванта времени составляет 32 единицы. Если для непрерывной работы процесса и этого мало, процесс поступает в очередь 3, для которой квантование времени не применяется и, при отсутствии готовых процессов в других очередях, может исполняться до окончания своего CPU burst. Чем больше значение продолжительности CPU burst, тем в менее приоритетную очередь попадает процесс, но тем на большее процессорное время он может рассчитывать. Таким образом, через некоторое время все процессы, требующие малого времени работы процессора, окажутся размещенными в высокоприоритетных очередях, а все процессы, требующие большого счета и с низкими запросами к времени отклика, – в низкоприоритетных.
Миграция процессов в обратном направлении может осуществляться по различным принципам. Например, после завершения ожидания ввода с клавиатуры процессы из очередей 1, 2 и 3 могут помещаться в очередь 0, после завершения дисковых операций ввода-вывода процессы из очередей 2 и 3 могут помещаться в очередь 1, а после завершения ожидания всех других событий – из очереди 3 в очередь 2. Перемещение процессов из очередей с низкими приоритетами в очереди с высокими приоритетами позволяет более полно учитывать изменение поведения процессов с течением времени.
Многоуровневые очереди с обратной связью представляют собой наиболее общий подход к планированию процессов из числа подходов, рассмотренных нами. Они наиболее трудны в реализации, но в то же время обладают наибольшей гибкостью. Понятно, что существует много других разновидностей такого способа планирования, помимо варианта, приведенного выше. Для полного описания их конкретного воплощения необходимо указать:
- Количество очередей для процессов, находящихся в состоянии готовность.
- Алгоритм планирования, действующий между очередями.
- Алгоритмы планирования, действующие внутри очередей.
- Правила помещения родившегося процесса в одну из очередей.
- Правила перевода процессов из одной очереди в другую.
Изменяя какой-либо из перечисленных пунктов, мы можем существенно менять поведение вычислительной системы.
3.7. Выводы по лекции 3
Одним из наиболее ограниченных ресурсов вычислительной системы является процессорное время. Для его распределения между многочисленными процессами в системе приходится применять процедуру планирования процессов. По степени длительности влияния планирования на поведение вычислительной системы различают краткосрочное, среднесрочное и долгосрочное планирование процессов. Конкретные алгоритмы планирования процессов зависят от поставленных целей, класса решаемых задач и опираются на статические и динамические параметры процессов и компьютерных систем. Различают вытесняющий и невытесняющий режимы планирования. При невытесняющем планировании исполняющийся процесс уступает процессор другому процессу только по собственному желанию, при вытесняющем планировании исполняющийся процесс может быть вытеснен из состояния исполнения помимо своей воли.
Простейшим алгоритмом планирования является невытесняющий алгоритм FCFS, который, однако, может существенно задерживать короткие процессы, не вовремя перешедшие в состояние готовность. В системах разделения времени широкое распространение получила вытесняющая версия этого алгоритма – RR.
Среди всех невытесняющих алгоритмов оптимальным с точки зрения среднего времени ожидания процессов является алгоритм SJF. Существует и вытесняющий вариант этого алгоритма. В интерактивных системах часто используется алгоритм гарантированного планирования, обеспечивающий пользователям равные части процессорного времени.
Алгоритм SJF и алгоритм гарантированного планирования являются частными случаями планирования с использованием приоритетов. В более общих методах приоритетного планирования применяются многоуровневые очереди процессов, готовых к исполнению, и многоуровневые очереди с обратной связью. Будучи наиболее сложными в реализации, эти способы планирования обеспечивают гибкое поведение вычислительных систем и их адаптивность к решению задач разных классов.
ЛЕКЦИЯ 4. КООПЕРАЦИЯ ПРОЦЕССОВ
4.1. Взаимодействующие процессы
Для достижения поставленной цели различные процессы (возможно, даже принадлежащие разным пользователям) могут исполняться псевдопараллельно на одной вычислительной системе или параллельно на разных вычислительных системах, взаимодействуя между собой.
Для чего процессам нужно заниматься совместной деятельностью? Какие существуют причины для их кооперации?
- Повышение скорости работы. Пока один процесс ожидает наступления некоторого события (например, окончания операции ввода-вывода), другие могут заниматься полезной работой, направленной на решение общей задачи. В многопроцессорных вычислительных системах программа разбивается на отдельные кусочки, каждый из которых будет исполняться на своем процессоре.
- Совместное использование данных. Различные процессы могут, к примеру, работать с одной и той же динамической базой данных или с разделяемым файлом, совместно изменяя их содержимое.
- Модульная конструкция какой-либо системы. Типичным примером может служить микроядерный способ построения операционной системы, когда различные ее части представляют собой отдельные процессы, взаимодействующие путем передачи сообщений через микроядро.
- Наконец, это может быть необходимо просто для удобства работы пользователя, желающего, например, редактировать и отлаживать программу одновременно. В этой ситуации процессы редактора и отладчика должны уметь взаимодействовать друг с другом.
Процессы не могут взаимодействовать, не общаясь, то есть, не обмениваясь информацией. "Общение" процессов обычно приводит к изменению их поведения в зависимости от полученной информации. Если деятельность процессов остается неизменной при любой принятой ими информации, то это означает, что они на самом деле в "общении" не нуждаются. Процессы, которые влияют на поведение друг друга путем обмена информацией, принято называть кооперативными или взаимодействующими процессами, в отличие от независимых процессов, не оказывающих друг на друга никакого воздействия.
Различные процессы в вычислительной системе изначально представляют собой обособленные сущности. Работа одного процесса не должна приводить к нарушению работы другого процесса. Для этого, в частности, разделены их адресные пространства и системные ресурсы, и для обеспечения корректного взаимодействия процессов требуются специальные средства и действия операционной системы. Нельзя просто поместить значение, вычисленное в одном процессе, в область памяти, соответствующую переменной в другом процессе, не предприняв каких-либо дополнительных усилий. Давайте рассмотрим основные аспекты организации совместной работы процессов.
4.2. Категории средств обмена информацией
Процессы могут взаимодействовать друг с другом, только обмениваясь информацией. По объему передаваемой информации и степени возможного воздействия на поведение другого процесса все средства такого обмена можно разделить на три категории.
- Сигнальные. Передается минимальное количество информации – один бит, "да" или "нет". Используются, как правило, для извещения процесса о наступлении какого-либо события. Степень воздействия на поведение процесса, получившего информацию, минимальна.
- Канальные. "Общение" процессов происходит через линии связи, предоставленные операционной системой. Объем передаваемой информации в единицу времени ограничен пропускной способностью линий связи. С увеличением количества информации возрастает и возможность влияния на поведение другого процесса.
- Разделяемая память. Два или более процессов могут совместно использовать некоторую область адресного пространства. Созданием разделяемой памяти занимается операционная система. Использование разделяемой памяти для передачи/получения информации осуществляется с помощью средств обычных языков программирования, в то время как сигнальным и канальным средствам коммуникации для этого необходимы специальные системные вызовы. Разделяемая память представляет собой наиболее быстрый способ взаимодействия процессов в одной вычислительной системе.
4.3. Логическая организация механизма передачи информации
Как устанавливается связь?Различают два способа адресации: прямую и непрямую. В случае прямой адресации взаимодействующие процессы непосредственно общаются друг с другом, при каждой операции обмена данными явно указывая имя или номер процесса, которому информация предназначена или от которого она должна быть получена. Если и процесс, от которого данные исходят, и процесс, принимающий данные, указывают имена своих партнеров по взаимодействию, то такая схема адресации называется симметричной прямой адресацией. Ни один другой процесс не может вмешаться в процедуру симметричного прямого общения двух процессов, перехватить посланные или подменить ожидаемые данные. Если только один из взаимодействующих процессов, например, передающий, указывает имя своего партнера по кооперации, а второй процесс в качестве возможного партнера рассматривает любой процесс в системе, например, ожидает получения информации от произвольного источника, то такая схема адресации называется асимметричной прямой адресацией.
При непрямой адресации данные помещаются передающим процессом в некоторый промежуточный объект для хранения данных, имеющий свой адрес, откуда они могут быть затем изъяты каким-либо другим процессом. Примером такого объекта может служить обычная доска объявлений или рекламная газета. При этом передающий процесс не знает, как именно идентифицируется процесс, который получит информацию, а принимающий процесс не имеет представления об идентификаторе процесса, от которого он должен ее получить.
При использовании прямой адресации связь между процессами в классической операционной системе устанавливается автоматически, без дополнительных инициализирующих действий. Единственное, что нужно для использования средства связи – знать, как идентифицируются процессы, участвующие в обмене данными.
При использовании непрямой адресации инициализация средства связи может и не требоваться. Информация, которой должен обладать процесс для взаимодействия с другими процессами, – это некий идентификатор промежуточного объекта для хранения данных, если он, конечно, не является единственным и неповторимым в вычислительной системе для всех процессов.
Информационная валентность процессов и средств связи. Следующий важный вопрос – это вопрос об информационной валентности связи. Слово "валентность" здесь использовано по аналогии с химией. Сколько процессов может быть одновременно ассоциировано с конкретным средством связи? Сколько таких средств связи может быть задействовано между двумя процессами?
Понятно, что при прямой адресации только одно фиксированное средство связи может быть задействовано для обмена данными между двумя процессами, и только эти два процесса могут быть ассоциированы с ним. При непрямой адресации может существовать более двух процессов, использующих один и тот же объект для данных, и более одного объекта может быть использовано двумя процессами.
К этой же группе вопросов следует отнести и вопрос о направленности связи. Является ли связь однонаправленной или двунаправленной? Под однонаправленной связью мы будем понимать связь, при которой каждый процесс, ассоциированный с ней, может использовать средство связи либо только для приема информации, либо только для ее передачи. При двунаправленной связи каждый процесс, участвующий в общении, может использовать связь и для приема, и для передачи данных. В коммуникационных системах принято называть однонаправленную связь симплексной, двунаправленную связь с поочередной передачей информации в разных направлениях – полудуплексной, а двунаправленную связь с возможностью одновременной передачи информации в разных направлениях – дуплексной. Прямая и непрямая адресация не имеет непосредственного отношения к направленности связи.
Особенности передачи информации с помощью линий связи.Как уже говорилось выше, передача информации между процессами посредством линий связи является достаточно безопасной по сравнению с использованием разделяемой памяти и более информативной по сравнению с сигнальными средствами коммуникации. Кроме того, разделяемая память не может быть использована для связи процессов, функционирующих на различных вычислительных системах. Возможно, именно поэтому каналы связи из средств коммуникации процессов получили наибольшее распространение. Коснемся некоторых вопросов, связанных с логической реализацией канальных средств коммуникации.
Буферизация.Может ли линия связи сохранять информацию, переданную одним процессом, до ее получения другим процессом или помещения в промежуточный объект? Каков объем этой информации? Иными словами, речь идет о том, обладает ли канал связи буфером и каков объем этого буфера. Здесь можно выделить три принципиальных варианта.
1. Буфер нулевой емкости или отсутствует. Никакая информация не может сохраняться на линии связи. В этом случае процесс, посылающий информацию, должен ожидать пока процесс, принимающий информацию, не соблаговолит ее получить, прежде чем заниматься своими дальнейшими делами (в реальности этот случай никогда не реализуется).
2. Буфер ограниченной емкости. Размер буфера равен n, то есть линия связи не может хранить до момента получения более чем n единиц информации. Если в момент передачи данных в буфере хватает места, то передающий процесс не должен ничего ожидать. Информация просто копируется в буфер. Если же в момент передачи данных буфер заполнен или места недостаточно, то необходимо задержать работу процесса отправителя до появления в буфере свободного пространства.
3. Буфер неограниченной емкости. Теоретически это возможно, но практически вряд ли реализуемо. Процесс, посылающий информацию, никогда не ждет окончания ее передачи и приема другим процессом.
При использовании канального средства связи с непрямой адресацией под емкостью буфера обычно понимается количество информации, которое может быть помещено в промежуточный объект для хранения данных.
4.4. Поток ввода/вывода и сообщения
Существует две модели передачи данных по каналам связи – поток ввода-вывода и сообщения. При передаче данных с помощью потоковой модели операции передачи/приема информации вообще не интересуются содержимым данных. Процесс, прочитавший 100 байт из линии связи, не знает и не может знать, были ли они переданы одновременно, т.е. одним куском или порциями по 20 байт, пришли они от одного процесса или от разных. Данные представляют собой простой поток байтов без какой-либо их интерпретации со стороны системы. Примерами потоковых каналов связи могут служить pipe и FIFO, описанные ниже.
Одним из наиболее простых способов передачи информации между процессами по линиям связи является передача данных через pipe (канал, трубу или, как его еще называют в литературе, конвейер). Представим себе, что у нас есть некоторая труба в вычислительной системе, в один из концов которой процессы могут "сливать" информацию, а из другого конца принимать полученный поток. Такой способ реализует потоковую модель ввода/вывода. Информацией о расположении трубы в операционной системе обладает только процесс, создавший ее. Этой информацией он может поделиться исключительно со своими наследниками – процессами-детьми и их потомками. Поэтому использовать pipe для связи между собой могут только родственные процессы, имеющие общего предка, создавшего данный канал связи.
Если разрешить процессу, создавшему трубу, сообщать о ее местонахождении в системе другим процессам, сделав вход и выход трубы каким-либо образом видимыми для всех остальных, например, зарегистрировав ее в операционной системе под определенным именем, мы получим объект, который принято называть FIFO или именованный pipe. Именованный pipe может использоваться для организации связи между любыми процессами в системе.
В модели сообщений процессы налагают на передаваемые данные некоторую структуру. Весь поток информации они разделяют на отдельные сообщения, вводя между данными, по крайней мере, границы сообщений. Примером границ сообщений являются точки между предложениями в сплошном тексте или границы абзаца. Кроме того, к передаваемой информации могут быть присоединены указания на то, кем конкретное сообщение было послано и для кого оно предназначено. Примером указания отправителя могут служить подписи под эпиграфами в книге. Все сообщения могут иметь одинаковый фиксированный размер или могут быть переменной длины. В вычислительных системах используются разнообразные средства связи для передачи сообщений: очереди сообщений, sockets (гнезда) и т.д. Часть из них мы рассмотрим подробнее в дальнейшем, в частности очереди сообщений будут рассмотрены в лекции 6, а гнезда (иногда их еще называют по транслитерации английского названия – сокеты) - в лекции 14.
И потоковые линии связи, и каналы сообщений всегда имеют буфер конечной длины. Когда мы будем говорить о емкости буфера для потоков данных, мы будем измерять ее в байтах. Когда мы будем говорить о емкости буфера для сообщений, мы будем измерять ее в сообщениях.
4.6. Надежность средств связи
Одним из существенных вопросов при рассмотрении всех категорий средств связи является вопрос об их надежности.
Способ коммуникации надежен, если при обмене данными выполняются четыре условия:
1. Не происходит потери информации.
2. Не происходит повреждения информации.
3. Не появляется лишней информации.
4. Не нарушается порядок данных в процессе обмена.
Очевидно, что передача данных через разделяемую память является надежным способом связи. То, что мы сохранили в разделяемой памяти, будет считано другими процессами в первозданном виде, если, конечно, не произойдет сбоя в питании компьютера. Для других средств коммуникации, как видно из приведенных выше примеров, это не всегда верно.
Каким образом в вычислительных системах пытаются бороться с ненадежностью коммуникаций? Давайте рассмотрим возможные варианты на примере обмена данными через линию связи с помощью сообщений. Для обнаружения повреждения информации будем снабжать каждое передаваемое сообщение некоторой контрольной суммой, вычисленной по посланной информации. При приеме сообщения контрольную сумму будем вычислять заново и проверять ее соответствие пришедшему значению. Если данные не повреждены (контрольные суммы совпадают), то подтвердим правильность их получения. Если данные повреждены (контрольные суммы не совпадают), то сделаем вид, что сообщение к нам не поступило. Вместо контрольной суммы можно использовать специальное кодирование передаваемых данных с помощью кодов, исправляющих ошибки. Такое кодирование позволяет при числе искажений информации, не превышающем некоторого значения, восстановить первоначальные неискаженные данные. Если по прошествии некоторого интервала времени подтверждение правильности полученной информации не придет на передающий конец линии связи, будем считать информацию утерянной и пошлем ее повторно. Для того чтобы избежать двойного получения одной и той же информации, на приемном конце линии связи должен осуществляться соответствующий контроль. Для гарантии правильного порядка получения сообщений будем их нумеровать. При приеме сообщения с номером, не соответствующим ожидаемому, поступаем с ним как с утерянным и ждем сообщения с правильным номером.
Подобные действия могут быть возложены:
- на операционную систему;
- на процессы, обменивающиеся данными;
- совместно на систему и процессы, разделяя их ответственность. Операционная система может обнаруживать ошибки при передаче данных и извещать об этом взаимодействующие процессы для принятия ими решения о дальнейшем поведении.
Как завершается связь?Наконец, важным вопросом при изучении средств обмена данными является вопрос прекращения обмена. Здесь нужно выделить два аспекта: требуются ли от процесса какие-либо специальные действия по прекращению использования средства коммуникации, и влияет ли такое прекращение на поведение других процессов. Для способов связи, которые не подразумевали никаких инициализирующих действий, обычно ничего специального для окончания взаимодействия предпринимать не надо. Если же установление связи требовало некоторой инициализации, то, как правило, при ее завершении бывает необходимо выполнить ряд операций, например, сообщить операционной системе об освобождении выделенного связного ресурса.
Если кооперативные процессы прекращают взаимодействие согласованно, то такое прекращение не влияет на их дальнейшее поведение. Иная картина наблюдается при несогласованном окончании связи одним из процессов. Если какой-либо из взаимодействующих процессов, не завершивших общение, находится в этот момент в состоянии ожидания получения данных, либо попадает в такое состояние позже, то операционная система обязана предпринять некоторые действия для того, чтобы исключить вечное блокирование этого процесса. Обычно это либо прекращение работы ожидающего процесса, либо его извещение о том, что связи больше нет (например, с помощью передачи заранее определенного сигнала).
Нити исполнения.Рассмотренные выше аспекты логической реализации относятся к средствам связи, ориентированным на организацию взаимодействия различных процессов. Однако усилия, направленные на ускорение решения задач в рамках классических операционных систем, привели к появлению совершенно иных механизмов, к изменению самого понятия "процесс".
В свое время внедрение идеи мультипрограммирования позволило повысить пропускную способность компьютерных систем, т.е. уменьшить среднее время ожидания результатов работы процессов. Но любой отдельно взятый процесс в мультипрограммной системе никогда не может быть выполнен быстрее, чем при работе в однопрограммном режиме на том же вычислительном комплексе. Тем не менее, если алгоритм решения задачи обладает определенным внутренним параллелизмом, мы могли бы ускорить его работу, организовав взаимодействие нескольких процессов. Рассмотрим следующий пример. Пусть у нас есть следующая программа на псевдоязыке программирования:
Ввести массив a Ввести массив b Ввести массив c
a = a + b
c = a + c
Вывести массив c
При выполнении такой программы в рамках одного процесса этот процесс четырежды будет блокироваться, ожидая окончания операций ввода-вывода. Но наш алгоритм обладает внутренним параллелизмом. Вычисление суммы массивов a + b можно было бы выполнять параллельно с ожиданием окончания операции ввода массива c.
Ввести массив a
Ожидание окончания операции ввода
Ввести массив b
Ожидание окончания операции ввода
Ввести массив с
Ожидание окончания операции ввода a = a + b
c = a + c
Вывести массив с
Ожидание окончания операции вывода
Такое совмещение операций по времени можно было бы реализовать, используя два взаимодействующих процесса. Для простоты будем полагать, что средством коммуникации между ними служит разделяемая память. Тогда наши процессы могут выглядеть следующим образом.
Процесс 1 Процесс 2
Ввести массив a Ожидание ввода
Ожидание окончания массивов a и b
операции ввода Ввести массив b Ожидание окончания
операции ввода Ввести массив с Ожидание окончания a = a + b
операции ввода c = a + c
Вывести массив с Ожидание окончания
операции вывода
Казалось бы, мы предложили конкретный способ ускорения решения задачи. Однако в действительности дело обстоит не так просто. Второй процесс должен быть создан, оба процесса должны сообщить операционной системе, что им необходима память, которую они могли бы разделить с другим процессом, и, наконец, нельзя забывать о переключении контекста. Поэтому реальное поведение процессов будет выглядеть примерно так.
Процесс 1 Процесс 2
Создать процесс 2
Переключение контекста
Выделение общей памяти
Ожидание ввода a и b Переключение контекста Выделение общей памяти Ввести массив a Ожидание окончания операции ввода Ввести массив b Ожидание окончания операции ввода Ввести массив с Ожидание окончания операции ввода
Переключение контекста
a = a + b Переключение контекста c = a + c
Вывести массив с Ожидание окончания операции вывода
Очевидно, что мы можем не только не выиграть во времени при решении задачи, но даже и проиграть, так как временные потери на создание процесса, выделение общей памяти и переключение контекста могут превысить выигрыш, полученный за счет совмещения операций.
Для того чтобы реализовать нашу идею, введем новую абстракцию внутри понятия "процесс" – нить исполнения или просто нить (в англоязычной литературе используется термин thread). Нити процесса разделяют его программный код, глобальные переменные и системные ресурсы, но каждая нить имеет собственный программный счетчик, свое содержимое регистров и свой стек. Теперь процесс представляется как совокупность взаимодействующих нитей и выделенных ему ресурсов. Процесс, содержащий всего одну нить исполнения, идентичен процессу в том смысле, который мы употребляли ранее. Для таких процессов мы в дальнейшем будем использовать термин "традиционный процесс". Иногда нити называют облегченными процессами или мини-процессами, так как во многих отношениях они подобны традиционным процессам. Нити, как и процессы, могут порождать нити-потомки, правда, только внутри своего процесса, и переходить из одного состояния в другое. Состояния нитей аналогичны состояниям традиционных процессов. Из состояния рождение процесс приходит содержащим всего одну нить исполнения. Другие нити процесса будут являться потомками этой нити-прародительницы. Мы можем считать, что процесс находится в состоянии готовность, если хотя бы одна из его нитей находится в состоянии готовность и ни одна из нитей не находится в состоянии исполнение. Мы можем считать, что процесс находится в состоянии исполнение, если одна из его нитей находится в состоянии исполнение. Процесс будет находиться в состоянии ожидание, если все его нити находятся в состоянии ожидание. Наконец, процесс находится в состоянии закончил исполнение, если все его нити находятся в состоянии закончил исполнение. Пока одна нить процесса заблокирована, другая нить того же процесса может выполняться. Нити разделяют процессор так же, как это делали традиционные процессы, в соответствии с рассмотренными алгоритмами планирования.
Поскольку нити одного процесса разделяют существенно больше ресурсов, чем различные процессы, то операции создания новой нити и переключения контекста между нитями одного процесса занимают значительно меньше времени, чем аналогичные операции для процессов в целом. Предложенная нами схема совмещения работы в терминах нитей одного процесса получает право на существование.
Нить 1 Нить 2
Создать нить 2
Переключение контекста нитей
Ожидание ввода a и b Переключение контекста нитей Ввести массив a Ожидание окончания
операции ввода Ввести массив b Ожидание окончания операции ввода Ввести массив с Ожидание окончания операции ввода
Переключение контекста нитей
a = a + b Переключение контекста нитей c = a + c
Вывести массив с Ожидание окончания операции вывода
Различают операционные системы, поддерживающие нити на уровне ядра и на уровне библиотек. Все сказанное выше справедливо для операционных систем, поддерживающих нити на уровне ядра. В них планирование использования процессора происходит в терминах нитей, а управление памятью и другими системными ресурсами остается в терминах процессов. В операционных системах, поддерживающих нити на уровне библиотек пользователей, и планирование процессора, и управление системными ресурсами осуществляются в терминах процессов. Распределение использования процессора по нитям в рамках выделенного процессу временного интервала осуществляется средствами библиотеки. В подобных системах блокирование одной нити приводит к блокированию всего процесса, ибо ядро операционной системы не имеет представления о существовании нитей. По сути дела, в таких вычислительных системах просто имитируется наличие нитей исполнения.
Далее для простоты изложения мы будем использовать термин "процесс", хотя все сказанное будет относиться и к нитям исполнения.
4.7. Выводы по лекции 4
Для достижения поставленной цели различные процессы могут исполняться псевдопараллельно на одной вычислительной системе или параллельно на разных вычислительных системах, взаимодействуя между собой. Причинами для совместной деятельности процессов обычно являются: необходимость ускорения решения задачи, совместное использование обновляемых данных, удобство работы или модульный принцип построения программных комплексов. Процессы, которые влияют на поведение друг друга путем обмена информацией, называют кооперативными или взаимодействующими процессами, в отличие от независимых процессов, не оказывающих друг на друга никакого воздействия и ничего не знающих о взаимном существовании в вычислительной системе.
Для обеспечения корректного обмена информацией операционная система должна предоставить процессам специальные средства связи. По объему передаваемой информации и степени возможного воздействия на поведение процесса, получившего информацию, их можно разделить на три категории: сигнальные, канальные и разделяемую память. Через канальные средства коммуникации информация может передаваться в виде потока данных или в виде сообщений и накапливаться в буфере определенного размера. Для инициализации "общения" процессов и его прекращения могут потребоваться специальные действия со стороны операционной системы. Процессы, связываясь друг с другом, могут использовать непрямую, прямую симметричную и прямую асимметричную схемы адресации. Существуют одно- и двунаправленные средства передачи информации. Средства коммуникации обеспечивают надежную связь, если при общении процессов не происходит потери и повреждения информации, не появляется лишней информации, не нарушается порядок данных.
Усилия, направленные на ускорение решения задач в рамках классических операционных систем, привели к появлению новой абстракции внутри понятия "процесс" – нити исполнения или просто нити. Нити процесса разделяют его программный код, глобальные переменные и системные ресурсы, но каждая нить имеет собственный программный счетчик, свое содержимое регистров и свой стек. Теперь процесс представляется как совокупность взаимодействующих нитей и выделенных ему ресурсов. Нити могут порождать новые нити внутри своего процесса, они имеют состояния, аналогичные состояниям процесса, и могут переводиться операционной системой из одного состояния в другое. В системах, поддерживающих нити на уровне ядра, планирование использования процессора осуществляется в терминах нитей исполнения, а управление остальными системными ресурсами – в терминах процессов. Накладные расходы на создание новой нити и на переключение контекста между нитями одного процесса существенно меньше, чем на те же самые действия для процессов, что позволяет на однопроцессорной вычислительной системе ускорять решение задач с помощью организации работы нескольких взаимодействующих нитей.
ЛЕКЦИЯ 5. АЛГОРИТМЫ СИНХРОНИЗАЦИИ
Под активностями мы будем понимать последовательное выполнение ряда действий, направленных на достижение определенной цели. Активности могут иметь место в программном и техническом обеспечении, в обычной деятельности людей и животных. Мы будем разбивать активности на некоторые неделимые, или атомарные, операции. Мы же называем их неделимыми потому, что считаем выполняемыми за раз, без прерывания деятельности.
Пусть имеется две активности:
P: a b c
Q: d e f
где a, b, c, d, e, f – атомарные операции. При последовательном выполнении активностей мы получаем такую последовательность атомарных действий:
PQ: a b c d e f
Что произойдет при исполнении этих активностей псевдопараллельно, в режиме разделения времени?
Активности могут расслоиться на неделимые операции с различным чередованием, то есть может произойти то, что на английском языке принято называть словом interleaving. Возможные варианты чередования:
а b c d e f a b d c e f a b d e c f a b d e f c a d b c e f
d e f a b c
Атомарные операции активностей могут чередоваться всевозможными различными способами с сохранением порядка расположения внутри активностей. Так как псевдопараллельное выполнение двух активностей приводит к чередованию их неделимых операций, результат псевдопараллельного выполнения может отличаться от результата последовательного выполнения. Рассмотрим пример. Пусть у нас имеется две активности P и Q, состоящие из двух атомарных операций каждая:
P: x=2 Q: x=3
y=x-1 y=x+1
Что мы получим в результате их псевдопараллельного выполнения, если переменные и y являются для активностей общими? Очевидно, что возможны четыре разных набора значений для пары (x, y): (3, 4), (2, 1), (2, 3) и (3, 2). Мы будем говорить, что набор активностей (например, программ) детерминирован, если всякий раз при псевдопараллельном исполнении для одного и того же набора входных данных он дает одинаковые выходные данные. В противном случае он недетерминирован. Выше приведен пример недетерминированного набора программ. Понятно, что детерминированный набор активностей можно безбоязненно выполнять в режиме разделения времени. Для недетерминированного набора такое исполнение нежелательно.
Можно ли до получения результатов определить, является ли набор активностей детерминированным или нет? Для этого существуют достаточные условия Бернстайна. Изложим их применительно к программам с разделяемыми переменными.
Введем наборы входных и выходных переменных программы. Для каждой атомарной операции наборы входных и выходных переменных – это наборы переменных, которые атомарная операция считывает и записывает. Набор входных переменных программы R(P) (R от слова read) суть объединение наборов входных переменных для всех ее неделимых действий. Аналогично, набор выходных переменных программы W(P) (W от слова write) суть объединение наборов выходных переменных для всех ее неделимых действий. Например, для программы
P: x=u+v y=x*w получаем R(P) = {u, v, x, w}, W(P) = {x, y}. Заметим, что переменная x присутствует как в R(P), так и в W(P).
Теперь сформулируем условия Бернстайна.
Если для двух данных активностей P и Q:
- пересечение W(P) и W(Q) пусто,
- пересечение W(P) с R(Q) пусто,
- пересечение R(P) и W(Q) пусто,
тогда выполнение P и Q детерминировано.
Если эти условия не соблюдены, возможно, параллельное выполнение P и Q детерминировано, а может быть, и нет.
Случай двух активностей естественным образом обобщается на их большее количество.
Условия Бернстайна информативны, но слишком жестки. По сути дела, они требуют практически невзаимодействующих процессов. А нам хотелось бы, чтобы детерминированный набор образовывали активности, совместно использующие информацию и обменивающиеся ею. Для этого нам необходимо ограничить число возможных чередований атомарных операций, исключив некоторые чередования с помощью механизмов синхронизации выполнения программ, обеспечив тем самым упорядоченный доступ программ к некоторым данным.
Про недетерминированный набор программ (и активностей вообще) говорят, что он имеет race condition (состояние гонки, состояние состязания). В приведенном выше примере процессы состязаются за вычисление значений переменных x и y.
Задачу упорядоченного доступа к разделяемым данным (устранение race condition) в том случае, когда нам не важна его очередность, можно решить, если обеспечить каждому процессу эксклюзивное право доступа к этим данным. Каждый процесс, обращающийся к разделяемым ресурсам, исключает для всех других процессов возможность одновременного общения с этими ресурсами, если это может привести к недетерминированному поведению набора процессов. Такой прием называется взаимоисключением (mutual exclusion). Если очередность доступа к разделяемым ресурсам важна для получения правильных результатов, то одними взаимоисключениями уже не обойтись, нужна взаимосинхронизация поведения программ.
5.1. Критическая секция
Важным понятием при изучении способов синхронизации процессов является понятие критической секции (critical section) программы. Критическая секция – это часть программы, исполнение которой может привести к возникновению race condition для определенного набора программ. Чтобы исключить эффект гонок по отношению к некоторому ресурсу, необходимо организовать работу так, чтобы в каждый момент времени только один процесс мог находиться в своей критической секции, связанной с этим ресурсом. Иными словами, необходимо обеспечить реализацию взаимоисключения для критических секций программ. Реализация взаимоисключения для критических секций программ с практической точки зрения означает, что по отношению к другим процессам, участвующим во взаимодействии, критическая секция начинает выполняться как атомарная операция.
Итак, для решения задачи необходимо, чтобы в том случае, когда процесс находится в своем критическом участке, другие процессы не могли войти в свои критические участки. Мы видим, что критический участок должен сопровождаться прологом (entry section) – "закрыть дверь изнутри на засов" – и эпилогом (exit section) – "отодвинуть засов", которые не имеют отношения к активности одиночного процесса. Во время выполнения пролога процесс должен, в частности, получить разрешение на вход в критический участок, а во время выполнения эпилога – сообщить другим процессам, что он покинул критическую секцию.
В общем случае структура процесса, участвующего во взаимодействии, может быть представлена следующим образом:
while (some condition) { entry section
critical section exit section remainder section }
Здесь под remainder section понимаются все атомарные операции, не входящие в критическую секцию.
5.2. Программные алгоритмы организации взаимодействия процессов. Требования, предъявляемые к алгоритмам
Организация взаимоисключения для критических участков, конечно, позволит избежать возникновения race condition, но не является достаточной для правильной и эффективной параллельной работы кооперативных процессов. Сформулируем пять условий, которые должны выполняться для хорошего программного алгоритма организации взаимодействия процессов, имеющих критические участки, если они могут проходить их в произвольном порядке.
1. Задача должна быть решена чисто программным способом на обычной машине, не имеющей специальных команд взаимоисключения. При этом предполагается, что основные инструкции языка программирования (такие примитивные инструкции, как load, store, test) являются атомарными операциями.
2. Не должно существовать никаких предположений об относительных скоростях выполняющихся процессов или числе процессоров, на которых они исполняются.
3. Если процесс P исполняется в своем критическом участке, то не существует никаких других процессов, которые исполняются в соответствующих критических секциях. Это условие получило название условия взаимоисключения (mutual exclusion).
4. Процессы, которые находятся вне своих критических участков и не собираются входить в них, не могут препятствовать другим процессам входить в их собственные критические участки. Если нет процессов в критических секциях и имеются процессы, желающие войти в них, то только те процессы, которые не исполняются в remainder section, должны принимать решение о том, какой процесс войдет в свою критическую секцию. Такое решение не должно приниматься бесконечно долго. Это условие получило название условия прогресса (progress).
5. Не должно возникать неограниченно долгого ожидания для входа одного из процессов в свой критический участок. От того момента, когда процесс запросил разрешение на вход в критическую секцию, и до того момента, когда он это разрешение получил, другие процессы могут пройти через свои критические участки лишь ограниченное число раз. Это условие получило название условия ограниченного ожидания (bound waiting).
Надо заметить, что описание соответствующего алгоритма в нашем случае означает описание способа организации пролога и эпилога для критической секции.
5.3. Запрет прерываний
Наиболее простым решением поставленной задачи является следующая организация пролога и эпилога:
while (some condition) { запретить все прерывания
critical section разрешить все прерывания remainder section }
Поскольку выход процесса из состояния исполнение без его завершения осуществляется по прерыванию, внутри критической секции никто не может вмешаться в его работу. Однако такое решение может иметь далеко идущие последствия, поскольку позволяет процессу пользователя разрешать и запрещать прерывания во всей вычислительной системе. Допустим, что пользователь случайно или по злому умыслу запретил прерывания в системе и зациклил или завершил свой процесс. Без перезагрузки системы в такой ситуации не обойтись.
Тем не менее, запрет и разрешение прерываний часто применяются как пролог и эпилог к критическим секциям внутри самой операционной системы, например, при обновлении содержимого PCB.
5.4. Переменная-замок
В качестве следующей попытки решения задачи для пользовательских процессов рассмотрим другое предложение. Возьмем некоторую переменную, доступную всем процессам, с начальным значением равным 0. Процесс может войти в критическую секцию только тогда, когда значение этой переменной-замка равно 0, одновременно изменяя ее значение на 1 – закрывая замок. При выходе из критической секции процесс сбрасывает ее значение в 0 – замок открывается (как в случае с покупкой хлеба студентами в разделе "Критическая секция").
shared int lock = 0;
/* shared означает, что */
/* переменная является разделяемой */
while (some condition) { while(lock); lock = 1;
critical section lock = 0; remainder section }
К сожалению, при внимательном рассмотрении мы видим, что такое решение не удовлетворяет условию взаимоисключения, так как действие while(lock); lock = 1; не является атомарным.
Допустим, процесс P протестировал значение переменной lock и принял решение двигаться дальше. 0
В этот момент, еще до присвоения переменной lock значения 1, планировщик передал управление процессу P. Он тоже изучает содержимое переменной lock и тоже принимает решение войти в 1 критический участок. Мы получаем два процесса, одновременно выполняющих свои критические секции.
5.5. Строгое чередование
Попробуем решить задачу сначала для двух процессов. Очередной подход будет также использовать общую для них обоих переменную с начальным значением 0. Только теперь она будет играть не роль замка для критического участка, а явно указывать, кто может следующим войти в него. Для i-го процесса это выглядит так:
Очевидно, что взаимоисключение гарантируется, процессы входят в критическую секцию строго по очереди: P , P , P , P , P , ... Но наш алгоритм не удовлетворяет условию прогресса. Например, 01010: если значение turn равно 1, и процесс P готов войти в критический участок, он не может сделать 0 этого, даже если процесс P находится в remainder section.
5.5. Флаги готовности
Недостаток предыдущего алгоритма заключается в том, что процессы ничего не знают о состоянии друг друга в текущий момент времени. Давайте попробуем исправить эту ситуацию. Пусть два наших процесса имеют разделяемый массив флагов готовности входа процессов в критический участок
shared int ready[2] = {0, 0};
Когда i-й процесс готов войти в критическую секцию, он присваивает элементу массива ready[i] значение равное 1. После выхода из критической секции он, естественно, сбрасывает это значение в 0. Процесс не входит в критическую секцию, если другой процесс уже готов к входу в критическую секцию или находится в ней.
while (some condition) { ready[i] = 1; while(ready[1-i]);
critical section ready[i] = 0;
remainder section }
Полученный алгоритм обеспечивает взаимоисключение, позволяет процессу, готовому к входу в критический участок, войти в него сразу после завершения эпилога в другом процессе, но все равно нарушает условие прогресса. Пусть процессы практически одновременно подошли к выполнению пролога. После выполнения присваивания ready[0]=1 планировщик передал процессор от процесса 0 процессу 1, который также выполнил присваивание ready[1]=1. После этого оба процесса бесконечно долго ждут друг друга на входе в критическую секцию. Возникает ситуация, которую принято называть тупиковой (deadlock).
5.6. Алгоритм Петерсона
Первое решение проблемы, удовлетворяющее всем требованиям и использующее идеи ранее рассмотренных алгоритмов, было предложено датским математиком Деккером (Dekker). В 1981 году Петерсон (Peterson) предложил более изящное решение. Пусть оба процесса имеют доступ к массиву флагов готовности и к переменной очередности.
При исполнении пролога критической секции процессP заявляет о своей готовности выполнить i критический участок и одновременно предлагает другому процессу приступить к его выполнению.
Если оба процесса подошли к прологу практически одновременно, то они оба объявят о своей готовности и предложат выполняться друг другу. При этом одно из предложений всегда следует после другого. Тем самым работу в критическом участке продолжит процесс, которому было сделано последнее предложение.
5.7. Алгоритм булочной (Bakery algorithm)
Алгоритм Петерсона дает нам решение задачи корректной организации взаимодействия двух процессов. Давайте рассмотрим теперь соответствующий алгоритм для n взаимодействующих процессов, который получил название алгоритм булочной, хотя применительно к нашим условиям его следовало бы скорее назвать алгоритм регистратуры в поликлинике. Основная его идея выглядит так. Каждый вновь прибывающий клиент (он же процесс) получает талончик на обслуживание с номером. Клиент с наименьшим номером на талончике обслуживается следующим. К сожалению, из-за неатомарности операции вычисления следующего номера алгоритм булочной не гарантирует, что у всех процессов будут талончики с разными номерами. В случае равенства номеров на талончиках у двух или более клиентов первым обслуживается клиент с меньшим значением имени (имена можно сравнивать в лексикографическом порядке). Разделяемые структуры данных для алгоритма – это два массива
shared enum {false, true} choosing[n];
shared int number[n];
Изначально элементы этих массивов инициируются значениями false и 0 соответственно. Введем следующие обозначения
(a,b) < (c,d), если a < c
или если a == c и b < d
max(a0, a1, ...., an) – это число k такое, что
k >= ai для всех i = 0, ...,n
Структура процесса Pi для алгоритма булочной приведена ниже
Последовательное выполнение некоторых действий, направленных на достижение определенной цели, называется активностью. Активности состоят из атомарных операций, выполняемых неразрывно, как единичное целое. При исполнении нескольких активностей в псевдопараллельном режиме атомарные операции различных активностей могут перемешиваться между собой с соблюдением порядка следования внутри активностей. Это явление получило название interleaving (чередование). Если результаты выполнения нескольких активностей не зависят от варианта чередования, то такой набор активностей называется детерминированным. В противном случае он носит название недетерминированного. Существует достаточное условие Бернстайна для определения детерминированности набора активностей, но оно накладывает очень жесткие ограничения на набор, требуя практически не взаимодействующих активностей. Про недетерминированный набор активностей говорят, что он имеет race condition (условие гонки, состязания). Устранение race condition возможно при ограничении допустимых вариантов чередований атомарных операций с помощью синхронизации поведения активностей. Участки активностей, выполнение которых может привести к race condition, называют критическими участками. Необходимым условием для устранения race condition является организация взаимоисключения на критических участках: внутри соответствующих критических участков не может одновременно находиться более одной активности.
Для эффективных программных алгоритмов устранения race condition помимо условия взаимоисключения требуется выполнение следующих условий: алгоритмы не используют специальных команд процессора для организации взаимоисключений, алгоритмы ничего не знают о скоростях выполнения процессов, алгоритмы удовлетворяют условиям прогресса и ограниченного ожидания. Все эти условия выполняются в алгоритме Петерсона для двух процессов и алгоритме булочной – для нескольких процессов.
ЛЕКЦИЯ 6. МЕХАНИЗМЫ СИНХРОНИЗАЦИИ
Рассмотренные алгоритмы хотя и являются корректными, но достаточно громоздки и не обладают элегантностью. Более того, процедура ожидания входа в критический участок предполагает достаточно длительное вращение процесса в пустом цикле, то есть напрасную трату драгоценного времени процессора. Существуют и другие серьезные недостатки у алгоритмов, построенных средствами обычных языков программирования. Допустим, что в вычислительной системе находятся два взаимодействующих процесса: один из них – H – с высоким приоритетом, другой – L – с низким приоритетом. Пусть планировщик устроен так, что процесс с высоким приоритетом вытесняет низкоприоритетный процесс всякий раз, когда он готов к исполнению, и занимает процессор на все время своего CPU burst (если не появится процесс с еще большим приоритетом). Тогда в случае, если процесс L находится в своей критической секции, а процесс H, получив процессор, подошел ко входу в критическую область, мы получаем тупиковую ситуацию. Процесс H не может войти в критическую область, находясь в цикле, а процесс L не получает управления, чтобы покинуть критический участок.
Для того чтобы не допустить возникновения подобных проблем, были разработаны различные механизмы синхронизации более высокого уровня. Описанию ряда из них – семафоров, мониторов и сообщений – и посвящена данная лекция.
6.1. Семафоры
Одним из первых механизмов, предложенных для синхронизации поведения процессов, стали семафоры, концепцию которых описал Дейкстра (Dijkstra) в 1965 году.
Концепция семафоров.Семафор представляет собой целую переменную, принимающую неотрицательные значения, доступ любого процесса к которой (за исключением момента ее инициализации) может осуществляться только через две атомарные операции: P (от датского слова proberen – проверять) и V (от verhogen – увеличивать). Классическое определение этих операций выглядит следующим образом:
P(S): пока S == 0 процесс блокируется;
S = S – 1; V(S): S = S + 1;
Эта запись означает следующее: при выполнении операции P над семафором S сначала проверяется его значение. Если оно больше 0, то из S вычитается 1. Если оно меньше или равно 0, то процесс блокируется до тех пор, пока S не станет больше 0, после чего из S вычитается 1. При выполнении операции V над семафором S к его значению просто прибавляется 1. В момент создания семафор может быть инициализирован любым неотрицательным значением.
Подобные переменные-семафоры могут с успехом применяться для решения различных задач организации взаимодействия процессов. В ряде языков программирования они были непосредственно введены в синтаксис языка (например, в ALGOL-68), в других случаях реализуются с помощью специальных системных вызовов. Соответствующая целая переменная располагается внутри адресного пространства ядра операционной системы. Операционная система обеспечивает атомарность операций P и V, используя, например, метод запрета прерываний на время выполнения соответствующих системных вызовов. Если при выполнении операции P заблокированными оказались несколько процессов, то порядок их разблокирования может быть произвольным, например, FIFO.
Решение проблемы producer-consumer с помощью семафоров.Одной из типовых задач, требующих организации взаимодействия процессов, является задача producer-consumer (производитель-потребитель). Пусть два процесса обмениваются информацией через буфер ограниченного размера. Производитель закладывает информацию в буфер, а потребитель извлекает ее оттуда. На этом уровне деятельность потребителя и производителя можно описать следующим образом.
Producer: while(1) {
produce_item;
put_item; } Consumer: while(1) {
get_item;
consume_item; }
Если буфер заполнен, то производитель должен ждать, пока в нем появится место, чтобы положить туда новую порцию информации. Если буфер пуст, то потребитель должен дожидаться нового сообщения. Как можно реализовать эти условия с помощью семафоров? Возьмем три семафора: empty, full и mutex. Семафор full будем использовать для гарантии того, что потребитель будет ждать, пока в буфере появится информация. Семафор empty будем использовать для организации ожидания производителя при заполненном буфере, а семафор mutex – для организации взаимоисключения на критических участках, которыми являются действия put_item и get_item (операции "положить информацию" и "взять информацию" не могут пересекаться, так как в этом случае возникнет опасность искажения информации). Тогда решение задачи на C-подобном языке выглядит так:
Легко убедиться, что это действительно корректное решение поставленной задачи. Попутно заметим, что семафоры использовались здесь для достижения двух целей: организации взаимоисключения на критическом участке и взаимосинхронизации скорости работы процессов.
6.2. Мониторы
Хотя решение задачи producer-consumer с помощью семафоров выглядит достаточно изящно, программирование с их использованием требует повышенной осторожности и внимания, чем отчасти напоминает программирование на языке Ассемблера. Допустим, что в рассмотренном примере мы случайно поменяли местами операции P, сначала выполнив операцию для семафора mutex, а уже затем для семафоров full и empty. Допустим теперь, что потребитель, войдя в свой критический участок (mutex сброшен), обнаруживает, что буфер пуст. Он блокируется и начинает ждать появления сообщений. Но производитель не может войти в критический участок для передачи информации, так как тот заблокирован потребителем. Получаем тупиковую ситуацию.
В сложных программах произвести анализ правильности использования семафоров с карандашом в руках становится очень непросто. В то же время обычные способы отладки программ зачастую не дают результата, поскольку возникновение ошибок зависит от interleaving атомарных операций, и ошибки могут быть трудновоспроизводимы. Для того чтобы облегчить работу программистов, в 1974 году Хором (Hoare) был предложен механизм еще более высокого уровня, чем семафоры, получивший название мониторов. Мы с вами рассмотрим конструкцию, несколько отличающуюся от оригинальной.
Мониторы представляют собой тип данных, который может быть с успехом внедрен в объектно-ориентированные языки программирования. Монитор обладает собственными переменными, определяющими его состояние. Значения этих переменных извне могут быть изменены только с помощью вызова функций-методов, принадлежащих монитору. В свою очередь, эти функции-методы могут использовать в работе только данные, находящиеся внутри монитора, и свои параметры. На абстрактном уровне можно описать структуру монитора следующим образом:
monitor monitor_name { описание внутренних переменных ;
void m1(...){...
}
void m2(...){...
}
...
void mn(...){...
}
{
блок инициализации
внутренних переменных;
}
}
Здесь функции m ,..., m представляют собой функции-методы монитора, а блок инициализации 1n внутренних переменных содержит операции, которые выполняются один и только один раз: при создании монитора или при самом первом вызове какой-либо функции-метода до ее исполнения.
Важной особенностью мониторов является то, что в любой момент времени только один процесс может быть активен, т.е. находиться в состоянии готовность или исполнение, внутри данного монитора. Поскольку мониторы представляют собой особые конструкции языка программирования, компилятор может отличить вызов функции, принадлежащей монитору, от вызовов других функций и обработать его специальным образом, добавив к нему пролог и эпилог, реализующий взаимоисключение. Так как обязанность конструирования механизма взаимоисключений возложена на компилятор, а не на программиста, работа программиста при использовании мониторов существенно упрощается, а вероятность возникновения ошибок становится меньше.
Однако одних только взаимоисключений недостаточно для того, чтобы в полном объеме реализовать решение задач, возникающих при взаимодействии процессов. Нам нужны еще и средства организации очередности процессов, подобно семафорам full и empty в предыдущем примере. Для этого в мониторах было введено понятие условных переменных (condition variables), над которыми можно совершать две операции wait и signal, отчасти похожие на операции P и V над семафорами.
Если функция монитора не может выполняться дальше, пока не наступит некоторое событие, она выполняет операцию wait над какой-либо условной переменной. При этом процесс, выполнивший операцию wait, блокируется, становится неактивным, и другой процесс получает возможность войти в монитор.
Когда ожидаемое событие происходит, другой процесс внутри функции-метода совершает операцию signal над той же самой условной переменной. Это приводит к пробуждению ранее заблокированного процесса, и он становится активным. Если несколько процессов дожидались операции signal для этой переменной, то активным становится только один из них. Что можно предпринять для того, чтобы у нас не оказалось двух процессов (разбудившего и пробужденного) одновременно активных внутри монитора? Хор предложил, чтобы пробужденный процесс подавлял исполнение разбудившего процесса, пока он сам не покинет монитор. Несколько позже Хансен (Hansen) предложил другой механизм: разбудивший процесс покидает монитор немедленно после исполнения операции signal. Мы будем придерживаться подхода Хансена.
Необходимо отметить, что условные переменные, в отличие от семафоров Дейкстры, не умеют запоминать предысторию. Это означает, что операция signal всегда должна выполняться после операции wait. Если операция signal выполняется над условной переменной, с которой не связано ни одного заблокированного процесса, то информация о произошедшем событии будет утеряна. Следовательно, выполнение операции wait всегда будет приводить к блокированию процесса.
Давайте применим концепцию мониторов к решению задачи производитель-потребитель.
Легко убедиться, что приведенный пример действительно решает поставленную задачу.
Реализация мониторов требует разработки специальных языков программирования и компиляторов для них. Мониторы встречаются в таких языках, как параллельный Евклид, параллельный Паскаль, Java и т.д. Эмуляция мониторов с помощью системных вызовов для обычных широко используемых языков программирования не так проста, как эмуляция семафоров. Поэтому можно пользоваться еще одним механизмом со скрытыми взаимоисключениями: механизмом, о котором мы уже упоминали, – передачей сообщений.
6.3. Сообщения
Для прямой и непрямой адресации достаточно двух примитивов, чтобы описать передачу сообщений по линии связи – send и receive. В случае прямой адресации мы будем обозначать их так:
send(P, message) – послать сообщение message процессу P; receive(Q, message) – получить сообщение message от процесса Q.
В случае непрямой адресации мы будем обозначать их так:
send(A, message) – послать сообщение message в почтовый ящик A; receive(A, message) – получить сообщение message из почтового ящика A.
Примитивы send и receive уже имеют скрытый от наших глаз механизм взаимоисключения. Более того, в большинстве систем они уже имеют и скрытый механизм блокировки при чтении из пустого буфера и при записи в полностью заполненный буфер. Реализация решения задачи producer-consumer для таких примитивов становится неприлично тривиальной. Надо отметить, что, несмотря на простоту использования, передача сообщений в пределах одного компьютера происходит существенно медленнее, чем работа с семафорами и мониторами.
6.4. Эквивалентность семафоров, мониторов и сообщений
Мы рассмотрели три высокоуровневых механизма, использующихся для организации взаимодействия процессов. Можно показать, что в рамках одной вычислительной системы, когда процессы имеют возможность использовать разделяемую память, все они эквивалентны. Это означает, что любые два из предложенных механизмов могут быть реализованы на базе третьего, оставшегося механизма.
Реализация мониторов и передачи сообщений с помощью семафоров.Рассмотрим сначала, как реализовать мониторы с помощью семафоров. Для этого нам нужно уметь реализовывать взаимоисключения при входе в монитор и условные переменные. Возьмем семафор mutex с начальным значением 1 для реализации взаимоисключения при входе в монитор и по одному семафору c для каждой условной переменной. Кроме того, для каждой условной переменной i заведем счетчик f для индикации наличия ожидающих процессов. Когда процесс входит в монитор, i компилятор будет генерировать вызов функции monitor_enter, которая выполняет операцию P над семафором mutex для данного монитора. При нормальном выходе из монитора (то есть при выходе без вызова операции signal для условной переменной) компилятор будет генерировать вызов функции monitor_exit, которая выполняет операцию V над этим семафором.
Для выполнения операции wait над условной переменной компилятор будет генерировать вызов функции wait, которая выполняет операцию V для семафора mutex, разрешая другим процессам входить в монитор, и выполняет операцию P над соответствующим семафором c, блокируя i вызвавший процесс. Для выполнения операции signal над условной переменной компилятор будет генерировать вызов функции signal_exit, которая выполняет операцию V над ассоциированным семафором c (если есть процессы, ожидающие соответствующего события), и выход из монитора i , минуя функцию monitor_exit.
Semaphore mutex = 1;
void monitor_enter(){
P(mutex); }
void monitor_exit(){
V(mutex); }
Semaphore ci = 0; int fi = 0;
void wait(i){
fi=fi + 1;
V(mutex);
P(ci);
fi=fi - 1; }
void signal_exit(i){
if (fi)V(ci);
else V(mutex); }
Заметим, что при выполнении функции signal_exit, если кто-либо ожидал этого события, процесс покидает монитор без увеличения значения семафора mutex, не разрешая тем самым всем процессам (кроме разбуженного) войти в монитор. Это увеличение совершит разбуженный процесс, когда покинет монитор обычным способом или когда выполнит новую операцию wait над какой-либо условной переменной.
Рассмотрим теперь, как реализовать передачу сообщений, используя семафоры. Для простоты опишем реализацию только одной очереди сообщений. Выделим в разделяемой памяти достаточно большую область под хранение сообщений, там же будем записывать, сколько пустых и заполненных ячеек находится в буфере, хранить ссылки на списки процессов, ожидающих чтения и памяти.
Взаимоисключение при работе с разделяемой памятью будем обеспечивать семафором mutex. Также заведем по одному семафору c на взаимодействующий процесс, для того чтобы обеспечивать i блокирование процесса при попытке чтения из пустого буфера или при попытке записи в переполненный буфер. Посмотрим, как такой механизм будет работать. Начнем с процесса, желающего получить сообщение.
Процесс-получатель с номером i прежде всего выполняет операцию P(mutex), получая в монопольное владение разделяемую память. После чего он проверяет, есть ли в буфере сообщения. Если нет, то он заносит себя в список процессов, ожидающих сообщения, выполняет V(mutex) и P(c). Если i сообщение в буфере есть, то он читает его, изменяет счетчики буфера и проверяет, есть ли процессы в списке процессов, жаждущих записи. Если таких процессов нет, то выполняется V(mutex), и процесс-получатель выходит из критической области. Если такой процесс есть (с номером j), то он удаляется из этого списка, выполняется V для его семафора c, и мы выходим из критического j района. Проснувшийся процесс начинает выполняться в критическом районе, так как mutex у нас имеет значение 0 и никто более не может попасть в критический район. При выходе из критического района именно разбуженный процесс произведет вызов V(mutex).
Как строится работа процесса-отправителя с номером i? Процесс, посылающий сообщение, тоже ждет, пока он не сможет иметь монополию на использование разделяемой памяти, выполнив операцию P(mutex). Далее он проверяет, есть ли место в буфере, и если да, то помещает сообщение в буфер, изменяет счетчики и смотрит, есть ли процессы, ожидающие сообщения. Если нет, выполняет V(mutex) и выходит из критической области. Если есть, "будит" один из них (с номером j), вызывая V(c), с одновременным удалением этого процесса из списка процессов, ожидающих сообщений, и j выходит из критического региона без вызова V(mutex), предоставляя тем самым возможность разбуженному процессу прочитать сообщение. Если места в буфере нет, то процесс-отправитель заносит себя в очередь процессов, ожидающих возможности записи, и вызывает V(mutex) и P(c).
Реализация семафоров и передачи сообщений с помощью мониторов.Нам достаточно показать, что с помощью мониторов можно реализовать семафоры, так как получать из семафоров сообщения мы уже умеем.
Самый простой способ такой реализации выглядит следующим образом. Заведем внутри монитора переменную-счетчик, связанный с эмулируемым семафором список блокируемых процессов и по одной условной переменной на каждый процесс. При выполнении операции P над семафором вызывающий процесс проверяет значение счетчика. Если оно больше нуля, уменьшает его на 1 и выходит из монитора. Если оно равно 0, процесс добавляет себя в очередь процессов, ожидающих события, и выполняет операцию wait над своей условной переменной. При выполнении операции V над семафором процесс увеличивает значение счетчика, проверяет, есть ли процессы, ожидающие этого события, и если есть, удаляет один из них из списка и выполняет операцию signal для условной переменной, соответствующей процессу.
Реализация семафоров и мониторов с помощью очередей сообщений.Покажем, наконец, как реализовать семафоры с помощью очередей сообщений. Для этого воспользуемся более хитрой конструкцией, введя новый синхронизирующий процесс. Этот процесс имеет счетчик и очередь для процессов, ожидающих включения семафора. Для того чтобы выполнить операции P и V, процессы посылают синхронизирующему процессу сообщения, в которых указывают свои потребности, после чего ожидают получения подтверждения от синхронизирующего процесса.
После получения сообщения синхронизирующий процесс проверяет значение счетчика, чтобы выяснить, можно ли совершить требуемую операцию. Операция V всегда может быть выполнена, в то время как операция P может потребовать блокирования процесса. Если операция может быть совершена, то она выполняется, и синхронизирующий процесс посылает подтверждающее сообщение. Если процесс должен быть блокирован, то его идентификатор заносится в очередь блокированных процессов, и подтверждение не посылается. Позднее, когда какой-либо из других процессов выполнит операцию V, один из блокированных процессов удаляется из очереди ожидания и получает соответствующее подтверждение.
Поскольку мы показали ранее как из семафоров построить мониторы, мы доказали эквивалентность мониторов, семафоров и сообщений.
6.5. Выводы по лекции 6
Для организации синхронизации процессов могут применяться специальные механизмы высокого уровня, блокирующие процесс, ожидающий входа в критическую секцию или наступления своей очереди для использования совместного ресурса. К таким механизмам относятся, например, семафоры, мониторы и сообщения. Все эти конструкции являются эквивалентными, т.е., используя любую из них, можно реализовать две оставшиеся.
ЛЕКЦИЯ 7. ТУПИКИ
В предыдущих лекциях мы рассматривали способы синхронизации процессов, которые позволяют процессам успешно кооперироваться. Однако в некоторых случаях могут возникнуть непредвиденные затруднения. Предположим, что несколько процессов конкурируют за обладание конечным числом ресурсов. Если запрашиваемый процессом ресурс недоступен, ОС переводит данный процесс в состояние ожидания. В случае, когда требуемый ресурс удерживается другим ожидающим процессом, первый процесс не сможет сменить свое состояние. Такая ситуация называется тупиком (deadlock). Говорят, что в мультипрограммной системе процесс находится в состоянии тупика, если он ожидает события, которое никогда не произойдет. Системная тупиковая ситуация (или "зависание системы") является следствием того, что один или более процессов находятся в состоянии тупика. Иногда подобные ситуации называют взаимоблокировками. В общем случае проблема тупиков эффективного решения не имеет.
Рассмотрим пример. Предположим, что два процесса осуществляют вывод с ленты на принтер. Один из них успел монополизировать ленту и претендует на принтер, а другой наоборот. После этого оба процесса оказываются заблокированными в ожидании второго ресурса (рис.7.1).
Определение. Множество процессов находится в тупиковой ситуации, если каждый процесс из множества ожидает события, которое может вызвать только другой процесс данного множества. Так как все процессы чего-то ожидают, то ни один из них не сможет инициировать событие, которое разбудило бы другого члена множества и, следовательно, все процессы будут спать вместе.
Рис. 7.1. Пример тупиковой ситуации
Выше приведен пример взаимоблокировки, возникающей при работе с так называемыми выделенными устройствами. Тупики, однако, могут иметь место и в других ситуациях. Например, в системах управления базами данных записи могут быть локализованы процессами, чтобы избежать состояния гонок (см. лекцию 5). В этом случае может получиться так, что один из процессов заблокировал записи, необходимые другому процессу, и наоборот. Таким образом, тупики могут иметь место, как на аппаратных, так и на программных ресурсах.
Тупики также могут быть вызваны ошибками программирования. Например, процесс может напрасно ждать открытия семафора, потому что в некорректно написанном приложении эту операцию забыли предусмотреть. Другой причиной бесконечного ожидания может быть дискриминационная политика по отношению к некоторым процессам. Однако чаще всего событие, которого ждет процесс в тупиковой ситуации, – освобождение ресурса, поэтому в дальнейшем будут рассмотрены методы борьбы с тупиками ресурсного типа.
Ресурсами могут быть как устройства, так и данные. Некоторые ресурсы допускают разделение между процессами, то есть являются разделяемыми ресурсами. Например, память, процессор, диски коллективно используются процессами. Другие не допускают разделения, то есть являются выделенными, например лентопротяжное устройство. К взаимоблокировке может привести использование как выделенных, так и разделяемых ресурсов. Например, чтение с разделяемого диска может одновременно осуществляться несколькими процессами, тогда как запись предполагает исключительный доступ к данным на диске. Можно считать, что часть диска, куда происходит запись, выделена конкретному процессу. Поэтому в дальнейшем мы будем исходить из предположения, что тупики связаны с выделенными ресурсами, то есть тупики возникают, когда процессу предоставляется эксклюзивный доступ к устройствам, файлам и другим ресурсам.
Традиционная последовательность событий при работе с ресурсом состоит из запроса, использования и освобождения ресурса. Тип запроса зависит от природы ресурса и от ОС. Запрос может быть явным (например, специальный вызов request) или неявным – open для открытия файла. Обычно, если ресурс занят и запрос отклонен, запрашивающий процесс переходит в состояние ожидания.
Далее в данной лекции будут рассматриваться вопросы обнаружения, предотвращения, обхода тупиков и восстановления после тупиков. Как правило, борьба с тупиками – очень дорогостоящее мероприятие. Тем не менее, для ряда систем, например для систем реального времени, иного выхода нет.
7.1. Условия возникновения тупиков
Условия возникновения тупиков были сформулированы Коффманом, Элфиком и Шошани в 1970г.
1. Условие взаимоисключения (Mutual exclusion). Одновременно использовать ресурс может только один процесс.
2. Условие ожидания ресурсов (Hold and wait). Процессы удерживают ресурсы, уже выделенные им, и могут запрашивать другие ресурсы.
3. Условие неперераспределяемости (No preemption). Ресурс, выделенный ранее, не может быть принудительно забран у процесса. Освобождены они могут быть только процессом, который их удерживает.
4. Условие кругового ожидания (Circular wait). Существует кольцевая цепь процессов, в которой каждый процесс ждет доступа к ресурсу, удерживаемому другим процессом цепи.
Для образования тупика необходимым и достаточным является выполнение всех четырех условий.
Обычно тупик моделируется циклом в графе, состоящем из узлов двух видов: прямоугольников – процессов и эллипсов – ресурсов, наподобие того, что изображен на рис.7.1. Стрелки, направленные от ресурса к процессу, показывают, что ресурс выделен данному процессу. Стрелки, направленные от процесса к ресурсу, означают, что процесс запрашивает данный ресурс.
7.2. Основные направления борьбы с тупиками
Проблема тупиков инициировала много интересных исследований в области информатики. Очевидно, что условие циклического ожидания отличается от остальных. Первые три условия формируют правила, существующие в системе, тогда как четвертое условие описывает ситуацию, которая может сложиться при определенной неблагоприятной последовательности событий. Поэтому методы предотвращения взаимоблокировок ориентированы главным образом на нарушение первых трех условий путем введения ряда ограничений на поведение процессов и способы распределения ресурсов. Методы обнаружения и устранения менее консервативны и сводятся к поиску и разрыву цикла ожидания ресурсов.
Итак, основные направления борьбы с тупиками:
- Игнорирование проблемы в целом
- Предотвращение тупиков
- Обнаружение тупиков
- Восстановление после тупиков.
7.3. Игнорирование проблемы тупиков
Простейший подход – не замечать проблему тупиков. Для того чтобы принять такое решение, необходимо оценить вероятность возникновения взаимоблокировки и сравнить ее с вероятностью ущерба от других отказов аппаратного и программного обеспечения. Проектировщики обычно не желают жертвовать производительностью системы или удобством пользователей для внедрения сложных и дорогостоящих средств борьбы с тупиками.
Любая ОС, имеющая в ядре ряд массивов фиксированной размерности, потенциально страдает от тупиков, даже если они не обнаружены. Таблица открытых файлов, таблица процессов, фактически каждая таблица являются ограниченными ресурсами. Заполнение всех записей таблицы процессов может привести к тому, что очередной запрос на создание процесса может быть отклонен. При неблагоприятном стечении обстоятельств несколько процессов могут выдать такой запрос одновременно и оказаться в тупике. Следует ли отказываться от вызова CreateProcess, чтобы решить эту проблему?
Подход большинства популярных ОС (Unix, Windows и др.) состоит в том, чтобы игнорировать данную проблему в предположении, что маловероятный случайный тупик предпочтительнее, чем нелепые правила, заставляющие пользователей ограничивать число процессов, открытых файлов и т.п. Сталкиваясь с нежелательным выбором между строгостью и удобством, трудно найти решение, которое устраивало бы всех.
7.4. Способы предотвращения тупиков
Цель предотвращения тупиков – обеспечить условия, исключающие возможность возникновения тупиковых ситуаций. Большинство методов связано с предотвращением одного из условий возникновения взаимоблокировки.
Система, предоставляя ресурс в распоряжение процесса, должна принять решение, безопасно это или нет. Возникает вопрос: есть ли такой алгоритм, который помогает всегда избегать тупиков и делать правильный выбор. Ответ – да, мы можем избегать тупиков, но только если определенная информация известна заранее.