Для решения обыкновенных дифференциальных уравнений (ОДУ или ODE), а также систем ОДУ в MATLAB реализованы различные методы (аналитические или численные). Реализации численных методов названы решателямиОДУ.
SOLVER (решатель) означает один из возможных численных методов решения ОДУ: ode45, ode23, ode113, ode23tb, ode15s, ode23s, ode23t , bvp4c или pdepe. Решатели реализуют следующие методы решения систем дифференциальных уравнений, причем для решения жестких систем уравнений рекомендуется использовать только специальные решатели ode 15s, ode23s, ode23t. ode23tb:
· ode45 – одношаговые явные методы Рунге-Кутта 4-го и 5-го порядка. Это классический метод, рекомендуемый для начальной пробы решения. Во многих случаях он дает хорошие результаты;
· ode23 – одношаговые явные методы Рунге-Кутта 2-го и 4-го порядка. При умеренной жесткости системы ОДУ и низких требованиях к точности этот метод может дать выигрыш в скорости решения;
· ode113 – многошаговый метод Адамса-Башворта-Мултона переменного порядка. Это адаптивный метод, который может обеспечить высокую точность решения;
· ode23tb – неявный метод Рунге-Кутта в начале решения и метод, использующий формулы обратного дифференцирования 2-го порядка в последующем;
· ode15s – многошаговый метод переменного порядка (от 1 до 5, по умолчанию 5), использующий формулы численного дифференцирования. Это адаптивный метод, его стоит применять, если решатель ode45 не обеспечивает решения;
· ode23s – одношаговый метод, использующий модифицированную формулу Розенброка 2-го порядка. Может обеспечить высокую скорость вычислений при низкой точности решения жесткой системы дифференциальных уравнений;
· ode23t – метод трапеций с интерполяцией. Этот метод дает хорошие результаты при решении задач, описывающих колебательные системы с почти гармоническим выходным сигналом;
· bvp4c – служит для решения проблемы граничных значений систем дифференциальных уравнений вида , (краевая задача);
· pdepe – нужен для решения систем параболических и эллиптических дифференциальных уравнений в частных производных, введен в ядро системы для поддержки новых графических функций Open GL, пакет расширения Partial Differential Equations Toolbox содержит более мощные средства.
Все решатели могут решать системы уравнений явного вида . Решатели ode15s и ode23t способны найти корни дифференциально-алгебраических уравнений , где М называется матрицей массы. Решатели ode15s, ode23s, ode23t и ode23tb могут решать уравнения неявного вида . Решатели ode23tb, ode23s служат для решения жестких дифференциальных уравнений, ode15s – для жестких дифференциальных и дифференциально-алгебраических уравнений, ode23t – для умеренно жестких дифференциальных и дифференциально-алгебраических уравнений.
Для решения ОДУ необходимо в окне команд MATLAB набрать одну из следующих команд, причем вместо solver необходимо подставить имя конкретного решателя (например ode45):
[X,Y] = solver(@F, xspan, у0)
[X,Y] = solver(@F, xspan, y0, options)
[X,Y] = solver(@F, xspan, y0, options, pl,p2...)
[X,Y,XE,YE,IE] = solver(@F, xspan, y0, options)
[X,Y,S] = solver(…)
В описанных командах приняты следующие обозначения и правила:
· @F – дескриптор OДУ (ссылка на имя M-файла, совпадающая с именем функции F – дифференциального уравнения);
· xspan – вектор, определяющий интервал интегрирования [x0 xfinal]. Для получения решений в конкретные моменты времени x0, xl, ... , xfinal (расположенные в порядке уменьшения или увеличения) нужно использовать xspan = [x0 xl ... xfinal] или с шагом h [x0: h: xfinal];
· у0 – вектор начальных условий;
· options – свойства (опции), создаваемые функцией odeset (еще одна функция odeget или bvpget (только для bvp4c) позволяет вывести параметры, установленные по умолчанию или с помощью функции odeset /bvpset);
· p1, р2,…, – произвольные параметры, передаваемые в функцию F;
· X, Y – матрица решений Y, где каждая строка соответствует значению аргумента, возвращенном в векторе-столбце X.
· [X,Y] = solver(@F, xspan, у0) – интегрирует систему дифференциальных уравнений вида на интервале xspan с начальными условиями у0. @F – дескриптор OДУ-функции. Каждая строка в массиве решений Y соответствует значению аргумента, возвращаемому в векторе-столбце X;
· [X,Y] = solver(@F, xspan, y0, options) – дает решение, подобное описанному выше, но с параметрами, определяемыми значениями аргумента options, созданного функцией odeset. Обычно используемые параметры включают допустимое значение относительной погрешности RelTol (по умолчанию le-3) и вектор допустимых значений абсолютной погрешности AbsTol (все компоненты по умолчанию равны 1е-6);
· [X,Y] = solver(@F, xspan, y0, options, pl,p2...) – дает решение, подобное описанному выше, передавая дополнительные параметры p1, р2,... в m-файл F всякий раз, когда он вызывается (вычисление функций правых частей). Используйте options=[], если никакие параметры не задаются (т.е. опции используются по умолчанию);
· [X,Y,XE,YE,IE] = solver(@F, xspan, y0, options) – при условии, что опция Events установлена в структуре options и позволяет зафиксировать момент, когда какая-либо из указанных переменных принимает значение 0; XE – вектор столбец моментов времени, когда фиксировалось событие, YE – перечень соответствующих переменных, IE – индексы событий, указывающие, в каком направлении изменялось решение в момент пересечения нуля (-1 убывало, +1 возрастало, 0 только фиксировалось);
· [X,Y,S] = solver(…) – позволяет получить статистические характеристики решателя; при этом вектор-столбец S имеет следующие компоненты (количество успешных шагов, количество неудачных попыток, количество вызовов функции F(X,Y), количество вызовов функции Якоби dF/dx, количество LU-разложений, количество решений вспомогательных систем уравнений);
Команда ODESET – задает, изменяет или выводит структуру свойств (опций) для решателя SOLVER обыкновенного дифференциального уравнения или их систем:
options = odeset('name1',value1,'name2',value2,...) – формирует массив записей (структуру) options, в котором свойствам (опциям) с именами 'name1', 'name2', … приписываются некоторые значения value1, value2,…(достаточно указать только первый символ); неприсвоенному значению приписывается пустой массив [];
options = odeset(oldopts,'name1',value1,...) – заменяет значения отдельных свойств (опций);
options = odeset(oldopts,newopts) – заменяется набор старых свойств набором новых, но если при этом для какого-либо из новых свойств указано [], то сохраняется прежнее значение этого свойства;
odeset – выводит список всех свойств (опций) с указанием их возможных значений и значений по умолчанию в фигурных скобках. Те или иные опции могут оказаться допустимыми только для отдельных методов и функций, поэтому они в первую очередь разбиваются на следующие категории:
Границы погрешностей интегрирования
Свойство
Значение
Описание
RelTol
Скаляр
{1e-3}
Допустимая относительная погрешность для всех компонентов вектора решения
AbsTol
Скаляр или вектор
{1e-6}
Абсолютная погрешность; если скаляр, то применяется для всех компонентов вектора решения; если вектор, то применяется к соответствующим компонентам
Выходные параметры решателя
Свойство
Значение
Описание
OutputFcn
Строка
Имя функции формирования выхода:
odeplot, odephas2, odephas3, odeprint
OutputSel
Вектор индексов
Указывает, какие компоненты вектора состояния формируют выход функции
Refine
Целое
Производит более гладкий вывод за счет увеличения количества выводимых точек, определяемого параметром Refine. Для большинства по умолчанию этот параметр равен 1. Однако для метода ode45 Refine равен 4. Для того чтобы выполнить вывод только в моменты отсчета, соответствующие шагу интегрирования, следует задать параметр Refine равным 1
Stats
On | {off}
Определяет, выводятся или нет статистические характеристики решателя
Характеристики якобиана (для функций ode15s и ode23)
Свойства
Значения
Описание
JConstant
On | {off}
Указывает, что якобиан dF/dx постоянен
Jaсobian
On | {off}
Сообщает решателю, что odefile запрашивает аргументы (t, x, ‘jacobian’) и возвращает dF/dx
JPattern
On | {off}
Сообщает решателю, что odefile запрашивает аргументы ([], [] ‘jpattern’) и возвращает маску якобиана dF/dx (см. функцию brussode)
Vectorized
On | {off}
Сообщает решателю, что odefile будет формировать выход F(t,x) в векторизованной форме [F(t,x1)F(t,x2)…]. Использование такой формы для решателей жестких систем возможно только в том случае, когда матрица Якоби формируется численно (режим по умолчанию) и если с помощью функции odeset свойство Vectorized было установлено в состояние’on’
Фиксация события
Свойство
Значение
Описание
Events
On | {off}
[ function ]
Сообщает решателю, что odefile запрашивает аргументы (t,x,‘events’) и возвращает параметры, связанные с событием “решение пересекло нулевое значение” (см. функцию odefile)
Характеристики матрицы при производных (для функций ode15s и ode23)
Свойство
Значение
Описание
Mass
On | {off}
Сообщает решателю, что odefile сформирован так, что функция F(t,[],‘mass’) возвращает матрицу М или М(t)
MassConstant
On | {off}
Сообщает решателю, что odefile сформирован так, что функция F(t,[],‘mass’) возвращает постоянную матрицу М
Шаг интегрирования
Свойство
Значение
Описание
MaxStep
Положительное число
Максимально допустимое значение шага интегрирования
InitialStep
“ ”
Начальное значение шага; решатель использует этот шаг и, если ошибка значительна, уменьшает его
Параметры функции ode15s
Свойство
Значение
Описание
MaxOrder
1/2/3/4/{5}
Максимальный порядок формулы интегрирования
BDF
on | {off}
Определяет, должны ли использоваться формулы обратного дифференцирования вместо используемых по умолчанию формул прямого дифференцирования
Например, команда options = odeset('RelTol',1e-4,'AbsTol',[1e-4 1e-4 1e-5]); – устанавливает свойству (опции) 'RelTol' (допустимая относительная погрешность для всех (так как скаляр) компонентов вектора решения) значение 1e-4, а свойству 'AbsTol' (абсолютная погрешность для соответствующих компонентов вектора) значения 1e-4, 1e-4, 1e-5.
Команда PLOT предназначена для построения двумерных графиков в линейном маштабе:
plot(Y)
plot(X1,Y1,...)
plot(X1,Y1,LineSpec1,...)
plot(...,'PropertyName',PropertyValue,...)
h = plot(...)
plot(Y) – строит график элементов одномерного массива Y в зависимости от номера элемента, если Y – двумерный массив, то строится график для столбцов;
plot(X1,Y1,...) – соответствует построению графика функции, когда одномерный массив Х1 соответствует значениям аргумента, а одномерный массив Y1 – значениям функции; если Х1 – одномерный массив, а Y1 двумерный, то строятся графики для столбцов массива Y1 в зависимости от значений Х1; если Х1 двумерный, Y1 одномерный, то строятся графики для столбцов Х1 в зависимости от Y1; если оба двумерные массивы, то строятся зависимости значений столбцов Y1 от значений столбцов Х1;
plot(X1,Y1,LineSpec1,...) – позволяет построить график функции, указав способ отображения линий, способ отображения маркера точек, цвет линий и маркера с помощью строковой переменной LineSpec, которая может включать до трех символов из следующей таблицы:
. точка
+ плюс
* звездочка
о кружок
х крест
s квадрат
d ромб
p пятигранник
h шестигранник
v стрелка вниз
^ стрелка вверх
< стрелка влево
> стрелка вправо
y желтый
m фиолетовый
c голубой
r красный
g зеленый
b синий
w белый
k черный
Если Х1 – одномерный массив, а Y1 – двухмерный, то для отдельной установки свойств каждому графику (столбцу) Y1 необходимо указать номер столбца Y1, (например для plot(Х1,Y1(:,1),’-’,Х1,Y1(:,2),’ –.’) первому столбцу Y1 назначается непрерывный тип линии, а второму столбцу – штрихпунктирный;
plot(X1,Y1,LineSpec1,X1,Y1,LineSpec1,...) – позволяет построить на одном графике несколько графических объектов Line для функций y1(x1), y2(x2),…, определив для каждой из них свой способ отображения.
plot(...,'PropertyName',PropertyValue,...) – позволяет задать значения свойств графического объекта Line, соответствующего построенному графику.
h = plot(...) – возвращает вектор дескрипторов для всех графических объектов Line текущего объекта.
Кроме команды PLOT могут быть использованы другие команды элементарной графики: FPLOT (построение графиков функций), LOGLOG (график в логарифмическом масштабе), SEMILOGX, SEMILOGY (график в полулогарифмическом масштабе), POLAR (график в полярных координатах), PIOTYY (график с двумя осями ординат), PLOT3 (построение линий и точек в трехмерном пространстве), MESHGRID (формирование прямоугольной сетки), MESH, MESHC, MESHZ (трехмерная сетчатая поверхность), SURF, SURFC (трехмерная сплошная поверхность), SHADING (затенение поверхности), SURFL (сплошная поверхность с подсветкой).
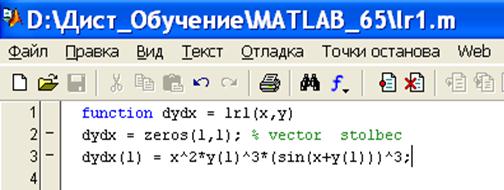
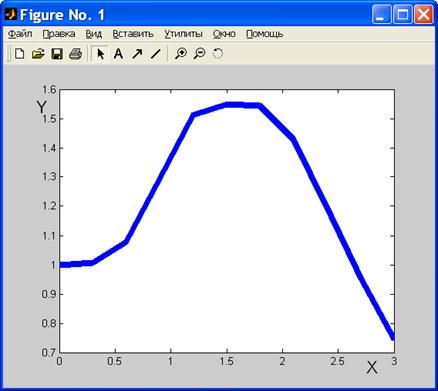
Покажем применение решателя ОДУ на примере решения задачи Коши
y¢=x2 y3 sin3 (x+y), y(0)=1 на отрезке [0,3] методом Рунге-Кутты с постоянным шагом h=0,3.
Перед решением запишем дифференциальное уравнение в виде ode-функции. Для этого в главном меню MATLAB выберем File àNew à M-File (Файл àНовый à M-Файл) и введем
Сохраним m-файл-функцию в необходимом каталоге (он при помощи списка на стандартной панели инструментов MATLAB должен быть выбран как «Текущий каталог») под именем, совпадающим с именем функции (LR1.M). Так как необходимо решить одно ОДУ первого порядка, то матрица производных dydx вырождается в вектор столбец из одного элемента dydx=zeros(1,1), для которого и задается вид дифференциального уравнения dydx(1)=x^2*y(1)^3*(sin(x+y(1)))^3.
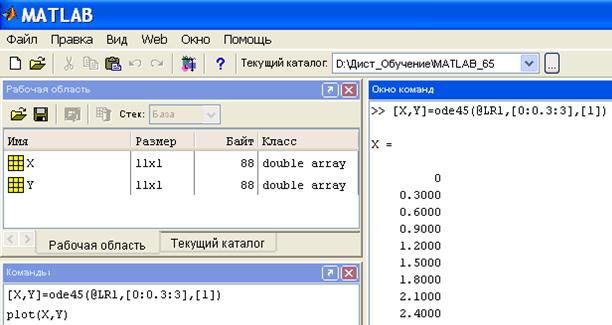
Тогда в окне команд для получения решения (решателем ode45) необходимо выполнить следующую команду:
»[X,Y]=ode45(@lrl,[0:0.3:3],[1]);
где @lr1 – значение дескриптора (@F) OДУ-функции; [0:0.3:3] – есть значения вектора (xspan), определяющего интервал интегрирования от 0 с шагом 0.3 до 3; [1] – значения вектора (у0) начальных условий y(0)=1.
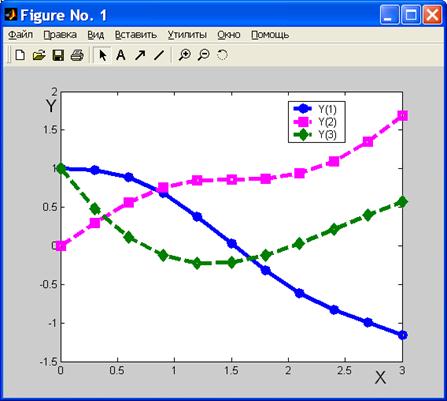
Для получения сопровождающего решение графика следует выполнить команду PLOT, например в виде:
»plot(X,Y);
Далее используюя средства редактирования графиков, можно добавить заголовок, легенду, обозначения осей, изменить толщину и цвет линий, шрифт и т.д.
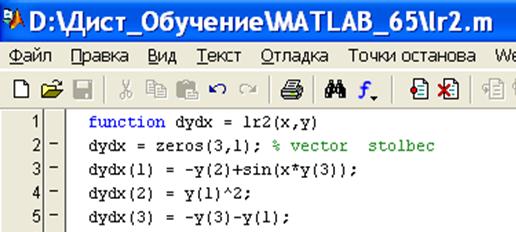
Тогда для решения задачи Коши для системы из трех ОДУ
y1¢ = -y2+ sin (x y3), y1(0)=1
y2¢ = y12 y2(0)=0
y3¢ = -y3 - y1 y3(0)=1
на отрезке [0,3] методом Рунге-Кутты с постоянным шагом h=0,3 получаем М-файл в виде:

 ,
,  (краевая задача);
(краевая задача); , где М называется матрицей массы. Решатели ode15s, ode23s, ode23t и ode23tb могут решать уравнения неявного вида
, где М называется матрицей массы. Решатели ode15s, ode23s, ode23t и ode23tb могут решать уравнения неявного вида  . Решатели ode23tb, ode23s служат для решения жестких дифференциальных уравнений, ode15s – для жестких дифференциальных и дифференциально-алгебраических уравнений, ode23t – для умеренно жестких дифференциальных и дифференциально-алгебраических уравнений.
. Решатели ode23tb, ode23s служат для решения жестких дифференциальных уравнений, ode15s – для жестких дифференциальных и дифференциально-алгебраических уравнений, ode23t – для умеренно жестких дифференциальных и дифференциально-алгебраических уравнений. на интервале xspan с начальными условиями у0. @F – дескриптор OДУ-функции. Каждая строка в массиве решений Y соответствует значению аргумента, возвращаемому в векторе-столбце X;
на интервале xspan с начальными условиями у0. @F – дескриптор OДУ-функции. Каждая строка в массиве решений Y соответствует значению аргумента, возвращаемому в векторе-столбце X; on | {off}
on | {off}

 y1¢ = -y2+ sin (x y3), y1(0)=1
y1¢ = -y2+ sin (x y3), y1(0)=1