· комбинационную схему формирования сигналов управления,
· комбинационную схему формирования сигналов переходов.
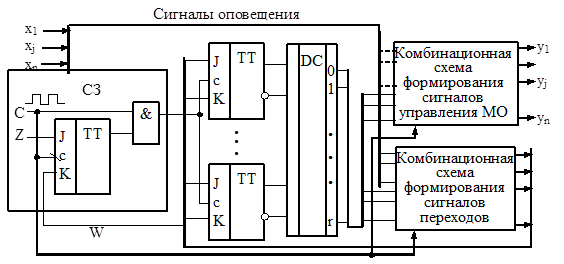
Схема запуска
Все действия по обработке данных в АЛУ производятся по сигналам управления уi,, которые формируются по синхросигналам С. Схема запуска по сигналу пуска Z формирует одиночные последовательности синхросигналов для формирования сигналов управления, которые требуются требуемых для выполнения одной операции обработки данных.
Схема запуска содержит JK-триггер и элемент И. В исходном состоянии триггер схемы запуска находится в нулевом состоянии, и его сигнал на выходе запрещает доступ синхросигналов в МПА. По сигналу пуска Z триггер переходит в единичное состояние, и открывается доступ синхроимпульсов в МПА до поступления с комбинационной схемы управляющего сигнала окончания операцииW на вход сброса K JK- триггера. В схеме запуска используются или двухтактные триггеры (рис. 8.1), или триггеры с динамическим входом сигнала синхронизации. Триггер запуска должен переходить в новое состояние по заднему фронту сигнала Z или W. Это необходимо для формирования полноценных по длительности управляющих импульсов с первого до последнего.
Элементы памяти.
Элементы памяти используют в качестве регистров состояния конечного автомата. Регистр состояния включен в цепь обратной связи МПА. Состояние автомата определяет выходные сигналы управления, а сигналы управления определяют следующее состояния МПА. Здесь возможен эффект гонок, когда изменения состояния МПА производятся асинхронно. Для устранения эффекта гонок, и чтобы триггеры переключались строго по синхроимпульсам, в качестве элементов памяти используются или двухтактные триггеры (рис. 8.1), или триггеры с динамическим входом сигнала синхронизации.
Дешифратор состояния
При хранении состояния МПА для сокращения оборудования обычно используют двоичное кодирование состояния. Состояния МПА используются в комбинационных схемах в дешифрованном виде. Дешифратор преобразует код состояния МПА в набор сигналов на соответствующих состоянию шинах.
Комбинационная схема формирования сигналов управления
Схема формирует серии сигналов управления. Отдельный сигнал управления yiсоответствует отдельной микрооперации (МО). Совокупность сигналов управления в одном такте соответствует микрокоманде (МК). Серия МК, формируемых схемой от сигнала Z до сигнала W, составляет микропрограмму (МП).
В МПА на основе автомата Мура выходные сигналы являются функцией только состояний автомата.
В МПА на основе автомата Мили выходные сигналы являются функцией состояний автомата и сигналов оповещения (на рис. 8.1 подача сигналов оповещения на комбинационную схему только для автомата Мили показана пунктирными линиями).
Комбинационная схема формирования сигналов переходов реализует функцию переходов. Она в каждом такте выдает комбинацию сигналов переходов, под действием которых в регистре состояния автомата фиксируется следующее состояние. Сигналы переходов в автоматах Мили и Мура являются функциями состояния и сигналов оповещения. Количество формируемых сигналов переходов и схема формирования (логические выражения) зависят от используемых типов триггеров (D или JK-триггеры). На рис. 8.1 представлен вариант схем управляющего автомата с использованием JK-триггеров.
Для простейших линейных микропрограмм можно использовать частный случай конечного автомата Мура –распределитель импульсов. Основой распределителя импульсов является счетчик, используемый в качестве регистра состояний. Он реализует линейную смену состояний конечного автомата. Счетчик не нужно проектировать, его можно просто выбрать. При использовании счетчика отпадает необходимость в использовании комбинационной схемы формирования сигналов переходов. Смена состояний производится внутренними цепями самого счетчика. При малом количестве состояний в качестве счетчика можно использовать регистр сдвига. В этом случае дешифратор не используется.