Модули управления приводами (МУП) предназначены для формирования аналоговых сигналов задания скорости для комплектных следящих приводов. Комплектные следящие привода обеспечивают управление электродвигателями переменного или постоянного тока соответствующих координат ТО. Количество модулей в системе управления определяется числом управляемых координат и конструктивными особенностями модулей.
Наиболее часто в качестве сигнала задания скорости используется напряжение U=0±10 В. Знак формируемого напряжения определяет направление перемещения по координатам. Также в качестве выходного сигнала МУП могут использоваться следующие типовые значения: U=0÷10 B, I=0÷20 мА, I=4÷20 мА, I=0÷5 мА и некоторые др.
Кроме аналогового управления в приводах используется и дискретное управление. Для этих целей обычно на привод выдаются сигналы: "Пуск", "Стоп", "Блокировка". Привод может выдавать в СУ сигнал готовности к работе.
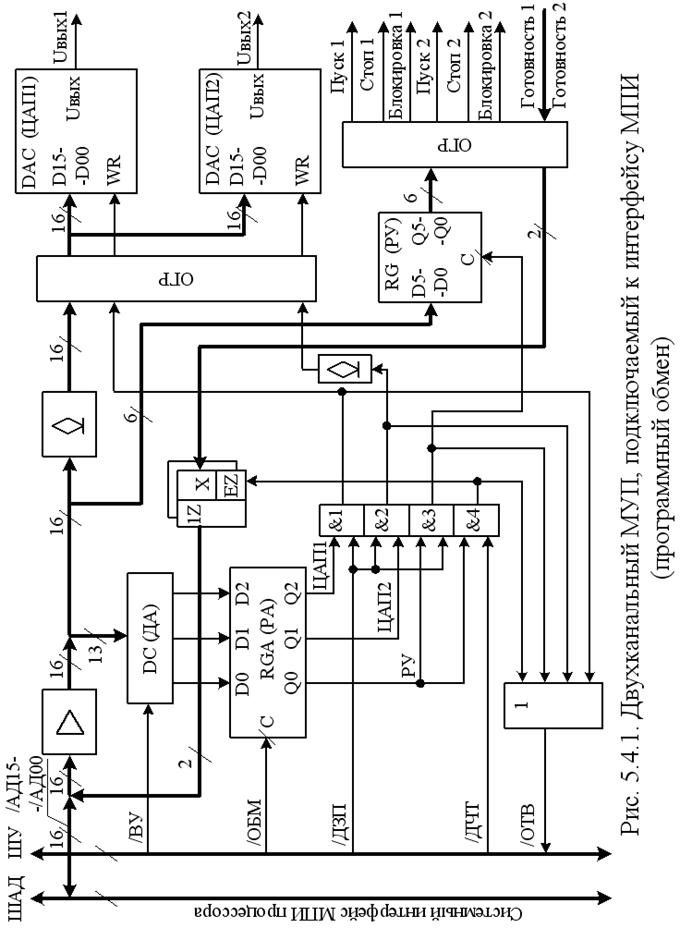
На рис. 5.4.1 приведена схема двухканального МУП, подключаемого к интерфейсу МПИ и использующего программный обмен с процессором.
Основными элементами модуля являются два цифроаналоговых преобразователя ЦАП1 и ЦАП2. Запись цифровой информации в них осуществляется по соответствующим адресам в программных циклах вывода процессора. Вывод дискретных сигналов на привода выполняется записью их в регистр управления (РУ). Чтение сигналов готовности производится через 2-разрядный буфер 1Z, имеющий выходы с Z-состоянием (высокоимпедансным состоянием).
Все цепи интерфейсной части модуля гальванически развязаны с выходами и входами МАУ. В оптронной гальванической развязке (ОГР), передающей логические уровни сигналов на микросхемы ЦАП и буфер 1Z необходимо использовать оптопару, которая в своём составе содержит формирователи логических уровней. Это существенно сократит затраты на реализацию схем ОГР.
Выходные элементы оптронной гальванической развязки, используемой для вывода дискретных сигналов "Пуск", "Стоп" и "Блокировка", должны быть открытыми (например, диодно-диодные, диодно-транзисторные оптопары). Это позволит при соответствующей доработке подключить к модулю привод с любыми входными цепями.
Так как светодиоды оптопар потребляют значительные токи (5 ÷ 30 мА) для их подключения в модуле используются элементы с открытым коллектором, обладающие достаточной нагрузочной способностью.
При необходимости обеспечения диагностики МУП можно использовать АЦП, на вход которого через коммутатор аналоговых сигналов подаются сигналы с выходов ЦАП1 и ЦАП2. В этом случае для реализации диагностики потребуются существенные аппаратные затраты: АЦП, элементы гальванической развязки и т.д. Для расширения возможностей таких модулей для АЦП предусматривают внешние входы и модуль преобразуется в модуль аналоговых входных и выходных сигналов.
Рис. 5.4.2. Использование аналоговых компараторов для диагностики МУП
Более простым вариантом диагностики МУП является использование аналоговых компараторов (рис. 5.4.2). В этом случае диагностируется не весь диапазон преобразования цифровых кодов в аналоговый сигнал, а только одно кодовое значение. Но при этом существенно снижаются аппаратные затраты на диагностику. Если выходной аналоговый сигнал ЦАП двуполярный, то необходимо использовать два компаратора. Напряжение сравнения формируется источником эталонного напряжения.
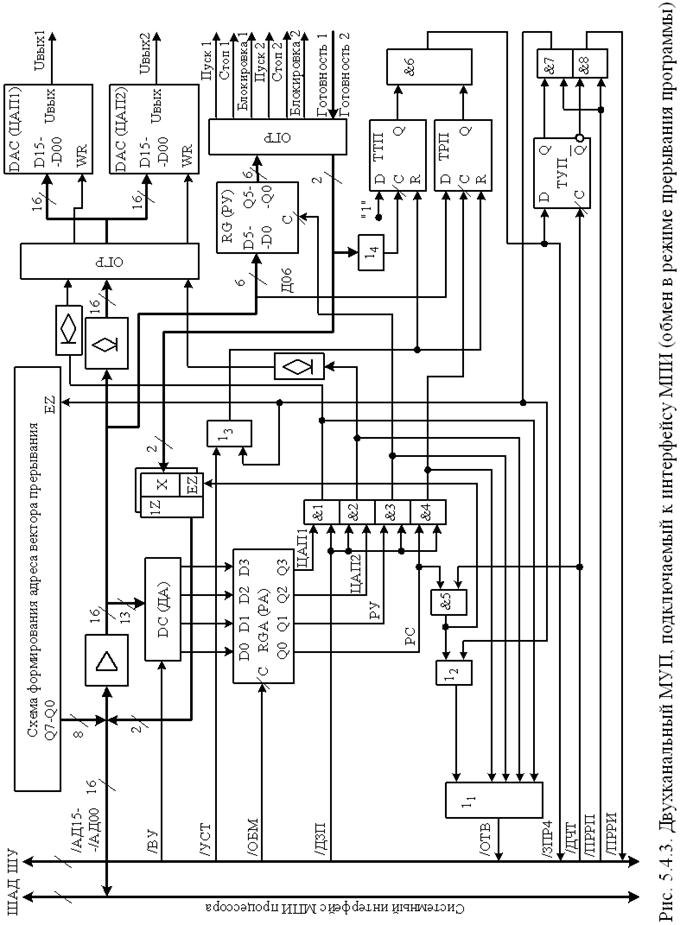
На рис. 5.4.3 приведён двухканальный модуль управления, обмен информацией с которым может быть осуществлён в режиме программного обмена или в режиме прерывания программы.
Инициаторами обмена в режиме прерывания программы являются привода, подключаемые к модулю и формирующие сигналы готовности. Данные сигналы устанавливают триггер требования прерывания (ТТП) и если триггер разрешения прерывания установлен (ТРП), формируется сигнал запроса прерывания /ЗПР4.
Процессор, отрабатывая подпрограмму обслуживания прерывания, вначале подпрограммы должен считать состояние сигналов "Готовность1" и "Готовность2" приводов. Считывание осуществляется в программном цикле ввода данных по адресу регистра состояния (РС). Проанализировав значение сигналов готовности, процессор выполняет цикл вывода информации в ЦАП, в соответствии с установленным сигналом готовности. При наличии двух сигналов готовности, последовательность вывода определяется программой.
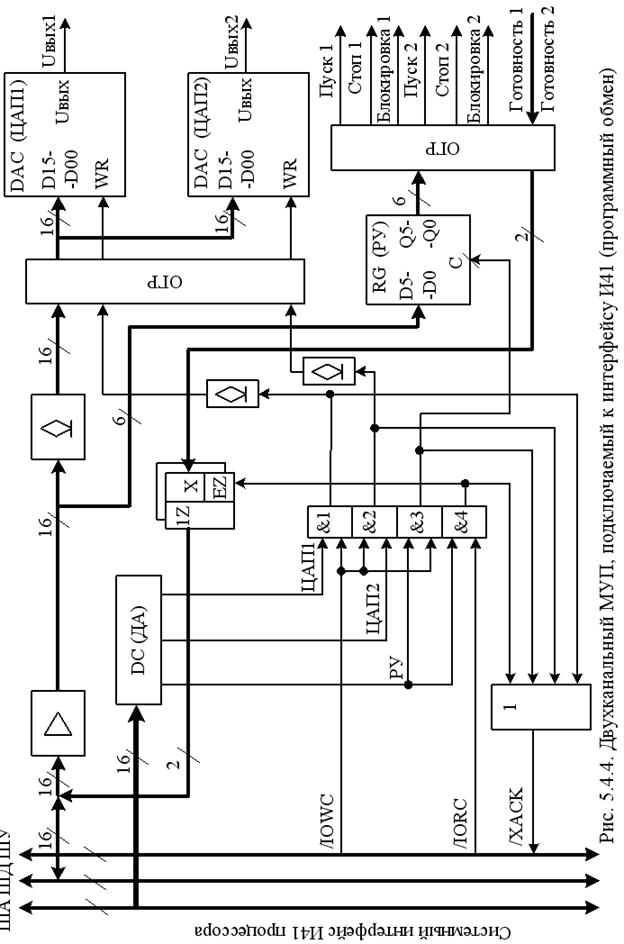
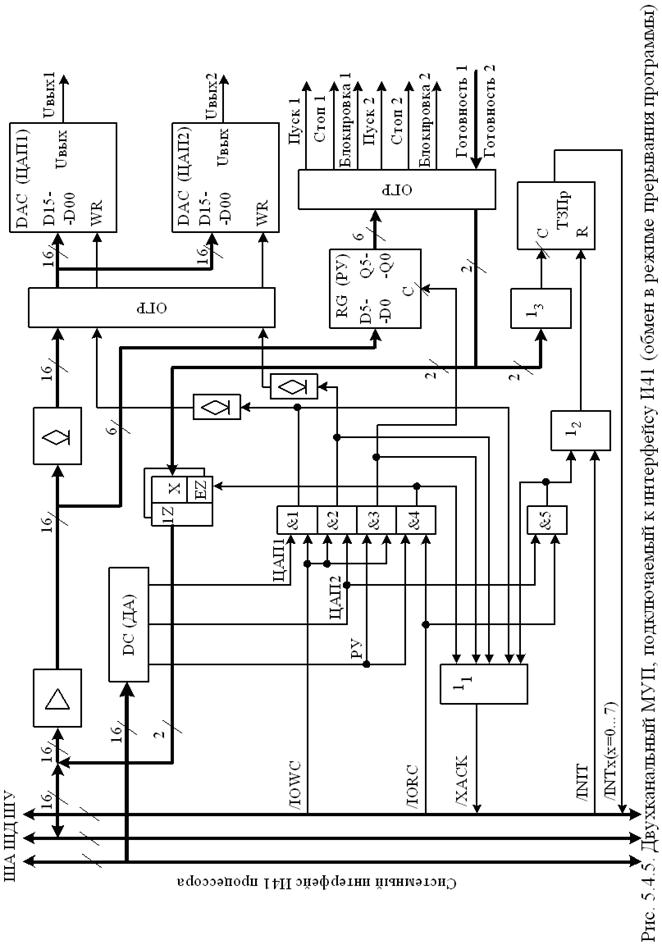
На рис. 5.4.4 и рис. 5.4.5 приведены схемы модулей управления приводами, подключаемые к интерфейсу И41.
МУП, показанный на рис. 5.4.4, аналогичен модулю рис. 5.4.1 и отличается только интерфейсной частью, соответствующей системе сигналов и протоколам И41.
В МУП, представленном на рис. 5.4.5, обмен информацией с процессором может быть организован как в режиме программного обмена, так и в режиме прерывания программы. Для инициации обмена в режиме прерывания программы в модуле имеется триггер запроса прерывания, который формирует при поступлении сигналов готовности приводов сигнал /INTХ. Номер линии запроса прерывания Х=0÷7 определяется при установке модуля в СУ и назначении ему приоритета среди других модулей.