1.Опадчий Ю. Ф., Глудкин О. П., Гуров А. И. Аналоговая и цифровая электроника. – М.: Горячая линия – Телеком , 2003.
2. Гальперин М. В. Электронная техника: Учебник.- М.: Форум: ИНФА,2003.
3. Волович Г. И. Схемотехника аналоговых и аналого- цифровых электронных устройств.- М.: Издательский дом ДОДЭКА, 2005.
4. Аналого- цифровые устройства: Методическое пособие к изучению курсов Схемотехника аналого-цифровых устройств и Аппаратные средства вычислительной техники./ Сост. Л. А. Кропачев, В. Н. Сяктерев- Ижевск: Изд-во ИжГТУ, 2005.- 161с.
5. Федорков Б. Г., Телец В. А., Микросхемы ЦАП и АЦП: функционирование, параметры, применение.- М.:Энергоатомиздат, 1990.
Схемотехника и МП техника
ОЭВМ (MCS), ЦСП (DSP), ПСНК (PSoC). Основные признаки и характеристики, области применения.
IBM PS – микропроцессорное устройство
Отдельная микросхема – процессор
Набор дополнительных микросхем (все микросхемы отдельно – есть объем
- состав меняется
Микроконтроллер – однокристальная ЭВМ
ОЭВМ = MCS, когда надо чем-то управлять.
Первый процессор сделал Intel
Архитектура MCS-51, MCS-52
Микропроцессор – построенное на одном кристалле программно-управляемое устройство, осуществляющее процесс обработки информации и управление им. Микропроцессоры появились, когда микросхемы приобрели уровень интеграции, при котором набор блоков, необходимых для программной реализации алгоритмов, удалось разместить на одном кристалле. Первый микропроцессор содержал 2300 транзисторов, работал на тактовой частоте 100 кГц и выполнял команду в среднем за 10 тактов. Современные микропроцессоры содержат до миллиардов транзисторов, работают на гигагерцовых частотах и выполняют команды за один такт или даже быстрее.
Программа реализуется микропроцессорной системой, основными частями которой являются:
- Микропроцессор;
- Память;
- Интерфейсные схемы и контроллеры для взаимодействия с внешними устройствами.
Соответственно областям применения целесообразно выделить классы:
- простые микропроцессоры;
- сложные микропроцессоры высокой производительности.
Первый класс ориентирован на применение в системах управления техническими объектами и технологическими процессами, причем чаще всего в качестве встроенных блоков. Микроконтроллер – объединение в одной микросхеме микросхемы процессора и дополнительные микросхемы – энергозависимая и оперативная память, порты ввода/вывода, аналогово-цифровые и цифроаналоговые преобразователи и т.д. (удобнее, где речь идет о встраиваемой технике) - удобно для измерительных приборов. Сложные микропроцессоры высокой производительности с разрядностью 32 или 64 разрядов характерны для универсальных компьютеров. На универсальных компьютерах решаются разнообразные задачи, в том числе требующие большой вычислительной мощности. Это ведет к усложнению архитектур процессоров, введению параллелизма вычислений, кэшированию памяти, усложнению шинных структур и т.д. Система в целом реализуется на нескольких кристаллах. В частности, основной процессор стали дополнять сопроцессором (в первую очередь для арифметики с плавающей точкой). Построены на БИС /СБИС. Основные архитектуры процессоров ОМК
В современных ОМК применяются следующие архитектуры процессоров :
RISC — (Reduced Instruction Set Computer) – процессор из которого убрали все команды которые выполняются больше чем один такт.
- минимум 16 регистров
- быстродействие (за счет того, что убрали некоторые команды)
CISC — (Complex Instruction Set Computer) традиционная архитектура с расширенным набором команд.
DSP (Цифровой сигнальный процессор) – сплошной поток данных, одинаковая операция
Блоки DSP (Digital Signal Processing) содержат большое число умножителей, сумматоров/вычислителей и аккумуляторов, благодаря чему при обработке сигналов достигается высокий уровень параллелизма и, соответственно, производительности. К основным направлениям обработки сигналов относятся: фильтрация, спектральный анализ, нелинейные преобразования.
Типы сигналов. В теоретических исследованиях и технике применяются сигналы трех типов:
- аналоговые;
- дискретные;
- цифровые.
В системах DSP аналоговые сигналы являются входными, поступающими от физических объектов, или выходными, поступающими на такие объекты. Аналоговый сигнал характеризуется непрерывностью существования. В любой момент времени можно считывать значение сигнала, причем оно может принимать любые значения в пределах диапазона от минимума до максимума.
Дискретный сигнал, соответствующий аналоговому, отображается совокупностью отчетов, взятых через равные интервалы времени (имеется в виду равномерная дискретизация, применяются и более сложные ее виды).
В цифровом сигнале отсчеты выражаются числами ограниченной разрядности и, следовательно, соответствуют аналоговым значениям лишь приближенно.
Структура DSP-блока
Рассмотрим DSP-блоки микросхемы Stratix фирмы Altera. Эти блоки сгруппированы на кристалле в два столбца. Каждый блок находится в окружении массива программируемой логики, которая может быть использована для дополнительных операций при построении устройств из нескольких блоков. У разных представителей семейств от 6 до 28 блоков. Блоки DSP могут выполнять операции умножения с возможностью накопления (суммирования) или вычитания результатов при разрядностях операндов 9, 18, или 36. При размерности 9х9 можно реализовать в одном блоке до 8 умножителей, при 18х18 – четыре и при 36х36 – один. Суммарно в старшей микросхеме может быть создано до 224 умножителей размерностью 9х9. Блоки DSP дают по 2*109 операций умножения-накопления в секунду, и если использовать все 28 блоков старшего представителя семейства, то будет достигнута вычислительная мощность в 56*109 операций MAC в секунду. Блоки содержат также 18-разрядные сдвигающие регистры. Максимальная частота работы блоков составляет 250 МГц. На вторые входы умножителей должны подаваться значения коэффициентов, взвешивающих отсчеты. Эти коэффициенты загружаются в нижние регистры каналов, причем загрузка может производиться последовательно (сверху-вниз через нижние регистры каналов) или параллельно, поскольку все регистры имеют и входы параллельной загрузки. В пределах одного блока при 18-разрядных операндах реализуются 4 умножителя и ассоциированные с ними схемы. Результаты умножений поступают далее на блоки суммирования/вывода, состоящие из сумматоров/вычитателей/аккумуляторов, суммирующих схем, мультиплексоров выбора выхода и выходных регистров. Архитектура сигнальных процессоров, по сравнению с микропроцессорами настольных компьютеров, имеет некоторые особенности:
Гарвардская архитектура (разделение памяти команд и данных), как правило модифицированная;
Большинство сигнальных процессоров имеют встроенную оперативную память, из которой может осуществляться выборка нескольких машинных слов одновременно. Нередко встроено сразу несколько видов оперативной памяти, например, в силу Гарвардской архитектуры бывает отдельная память для инструкций и отдельная — для данных.
Некоторые сигнальные процессоры обладают одним или даже несколькими встроенными постоянными запоминающими устройствами с наиболее употребительными подпрограммами, таблицами и т. п.
Аппаратное ускорение сложных вычислительных инструкций, то есть быстрое выполнение операций, характерных для цифровой обработки сигналов, например, операция «умножение с накоплением» (MAC) (Y := X + A × B) обычно исполняется за один такт.
«Бесплатные» по времени циклы с заранее известной длиной. Поддержка векторно-конвейерной обработки с помощью генераторов адресных последовательностей.
Детерминированная работа с известными временами выполнения команд, что позволяет выполнять планирование работы в реальном времени.
Сравнительно небольшая длина конвейера, так что незапланированные условные переходы могут занимать меньшее время, чем в универсальных процессорах.
Экзотический набор регистров и инструкций, часто сложных для компиляторов. Некоторые архитектуры используют VLIW.
По сравнению с микроконтроллерами, ограниченный набор периферийных устройств — впрочем, существуют «переходные» чипы, сочетающие в себе свойства DSP и широкую периферию микроконтроллеров. Области применения
Коммуникационное оборудование:
Уплотнение каналов передачи данных;
Кодирование аудио- и видеопотоков;
Системы гидро- и радиолокации;
Распознавание речи и изображений;
Речевые и музыкальные синтезаторы;
Анализаторы спектра;
Управление технологическими процессами;
Другие области, где необходима быстродействующая обработка сигналов, в том числе в реальном времени. Основные параметры ЦСП
Тип арифметики. ЦСП делятся на процессоры, обрабатывающие данные с фиксированной точкой и обрабатывающие данные с плавающей точкой. Устройства с плавающей точкой удобнее в применении, но они заметно сложнее по устройству и более дороги;
Разрядность данных. Большинство ЦСП с фиксированной точкой обрабатывают данные с разрядностью 16 бит, процессоры с плавающей точкой — 32 бита. Многие модели могут обрабатывать данные с двойной точностью.
Быстродействие. Быстродействие как интегральную характеристику определить достаточно сложно, поэтому скорость работы характеризуют несколькими параметрами, а также временем решения некоторых реальных задач.
Тактовая частота и Время командного цикла. Для современных ЦСП тактовая внутренняя частота может отличаться от внешней, поэтому могут указываться два значения. Время командного цикла указывает на время выполнения одного этапа команды, то есть время одного цикла конвейера команд. Так как команды могут исполняться за разное количество циклов, а также с учётом возможности одновременного исполнения нескольких команд, этот параметр может характеризовать быстродействие ЦСП достаточно приближённо.
Количество выполняемых команд за единицу времени. Различное время исполнения команд, а также исполнение нескольких команд одновременно не позволяют использовать этот параметр для надёжной характеристики быстродействия.
Количество выполняемых операций за единицу времени (MIPS). Данный параметр учитывает одновременную обработку нескольких команд и наличие параллельных вычислительных модулей, поэтому достаточно хорошо может указывать на быстродействие ЦСП. Некоторой проблемой здесь остаётся то, что понятие «операции» чётко не формализовано.
Количество выполняемых операций с плавающей точкой за единицу времени. Параметр аналогичен предыдущему и используется для процессоров с плавающей точкой.
Количество выполняемых операций MAC за единицу времени. Данная команда, с одной стороны, является базовой для многих вычислений, а с другой — достаточно проста. Поэтому время её исполнения можно использовать в том числе и для оценки общей производительности ЦСП.
Виды и объём внутренней памяти. Объём внутренней оперативной памяти показывает, сколько данных ЦСП может обработать без обращения к внешней памяти, что может характеризовать общее быстродействие системы а также возможность работать «в реальном времени». Тип ПЗУ определяет возможности по программированию устройства. Модели с обычным ПЗУ подходят для крупносерийного производства, ППЗУ (однократно программируемое) удобно для небольших тиражей, а применение Flash-памяти позволяет менять программу устройства многократно во время эксплуатации. На данный момент не очень мощные DSP чаще всего снабжены достаточно большой Flash-памятью (её цена неуклонно снижается) и заметным объёмом RAM и поэтому могут являться самодостаточными без добавления внешней памяти и на этапе разработки и на этапе производства, что повышает конкурентоспособность таких DSP в ряде сегментов рынка. Мощные DSP как правило полагаются на внешнюю память подключённую по достаточно быстрым шинам а размещение там Flash-памяти может быть технически проблематичным, например, из-за заметного выделения тепла.
Адресуемый объём памяти. Объём адресуемой внешней памяти характеризуется шириной внешней шины адреса.
Способ начальной загрузки.
Количество и параметры портов ввода-вывода. Данный параметр показывает возможности ЦСП по взаимодействию с внешними по отношению к нему устройствами.
Состав внутренних дополнительных устройств. В число внутренних могут входить разнообразные по назначению устройства, например, общего применения — таймеры, контроллеры ПДП и т. д., а также проблемно-ориентированные — АЦП, кодеки, компрессоры данных и другие.
Напряжение питания и потребляемая мощность. Данная характеристика особенно важна для ЦСП, встраиваемых в переносные устройства. Обычно предпочтительнее низковольтные устройства (1,8-3,3В), которые имеют быстродействие аналогично 5В процессорам, но заметно экономнее в плане потребления энергии. Многие устройства имеют режимы экономии при простое, либо позволяют программно отключать часть своих устройств.
Состав и функциональность средств разработки и поддержки.
Перечень языков программирования, для которых есть компиляторы под данную систему;
Наличие и возможности средств отладки готовых программ;
Доступность документации и технической поддержки;
Наличие библиотек стандартных подпрограмм и математических функций;
Наличие, доступность и возможности совместимых устройств — АЦП, ЦАП, контроллеры питания и т. д.
Допустимые параметры окружающей среды.
Другие, в зависимости от назначения.
Часто используются также интегральные характеристики ЦСП, например показатель «мощность/ток/быстродействие», например ma/MIPS (миллиампер на 1 млн инструкций в секунду), что позволяет оценить реальную потребляемую мощность в зависимости от сложности задачи, решаемой процессором в указанный момент.
Выбор ЦСП целиком определяется назначением разрабатываемой системы. Например, для массовых мобильных устройств важна дешевизна процессора, низкое энергопотребление, в то время как стоимость разработки системы отходит на второй план. С другой стороны, для измерительного оборудования, систем обработки звуковой и видеоинформации важны эффективность процессора, наличие развитых инструментальных средств, многопроцессорность и т. д. Цифровые сигнальные процессоры строятся на основе т. н. «Гарвардской архитектуры», отличительной особенностью которой является то, что программы и данные хранятся в различных устройствах памяти — памяти программ и памяти данных. В отличие от архитектуры фон Неймана, где процессору для выборки команды и двух операндов требуется минимум три цикла шины, ЦСП может производить одновременные обращения как к памяти команд, так и к памяти данных, и указанная выше команда может быть получена за два цикла шины. В реальности, благодаря продуманности системы команд и другим мерам, это время может быть сокращено до одного цикла. В реальных устройствах память команд может хранить не только программы, но и данные. В этом случае говорят, что ЦСП построен по модифицированной гарвардской архитектуре.
Память команд и память данных обычно располагаются на кристалле ЦСП. В связи с тем, что эта память имеет относительно небольшой объём, возникает необходимость в использовании внешних (относительно кристалла процессора) запоминающих устройств. Для таких устройств раздельные шины команд и данных не используются, так как это потребовало бы значительно увеличить количество внешних выводов кристалла, что дорого и непрактично. Поэтому взаимодействие ЦСП с внешними запоминающими устройствами происходит по одному комплекту шин без разделения на команды и данные. Следует также заметить, что обращение к внешней памяти всегда занимает значительно больше времени, чем к внутренней, поэтому в приложениях, критичных ко времени исполнения, такие обращения необходимо минимизировать.
"Гарвардская" RISC - подобная архитектура с оригинальной системой команд и преимущественно однотактным исполнением инструкций;
SISD (Single Instructions Single Data) организация потоков команд и данных;
Стандартный набор инструкций, процедуры обработки и пересылки совмещаются;
3-ступенчатый конвейер по выполнению 32- и 64-разрядных инструкций;
Расширенные возможности по динамическому диапазону обрабатываемых данных, позволяющие обрабатывать данные в 8/16/32-разрядных форматах с фиксированной точкой, либо в одном из форматов с плавающей точкой - 24Е8 (стандарт IEEE 754) или 32Е16 (расширенный формат). Обеспечение при этом компромиссного выбора между точностью и производительностью. Аппаратные меры повышения точности и динамического диапазона (блочная плавающая точка; режим насыщения; инструкции преобразования форматов);
Аппаратная поддержка программных циклов;
Память программ PRAM объемом 16 Кбайт;
Двухпортовые памяти данных XRAM и YRAM объемом 96 и 48 Кбайт соответственно;
Пиковая производительность DSP:
240 млн. оп/с 32-битных операций с плавающей точкой (IEEE 754);
1440 млн. оп/с 8-битных операций с фиксированной точкой;
640 млн. оп/с 16-битных операций с фиксированной точкой;
320 млн. оп/с 32-битных операций с фиксированной точкой.
Порт внешней памяти (MPORT):
Шина данных - 32 разряда, шина адреса - 32 разряда;
Встроенный контроллер управления статической памятью типа SRAM, FLASH, ROM, а также синхронной памятью типа SDRAM;
Программное конфигурирование типа памяти и объема ее сегмента;
Программное задание циклов ожидания;
Формирование сигналов выборки 4 сегментов памяти;
Обеспечение обслуживания 4 внешних прерываний.
Периферийные устройства:
12 - канальный контроллер прямого доступа в память (DMA). 4 внешних запроса прямого доступа. Специальные режимы синхронизации. Поддержка 2-мерной и разрядно-инверсной адресации. Режим передачи Flyby, подобный реализованному в ADSP-TS201: внешнее устройство - внешняя память;
два порта обмена последовательным кодом (SPORT) совместимые с ADSP21160 (разработка фирмы ADI);
четыре линковых порта (LPORT) совместимые с ADSP21160. Имеется режим работы в качестве портов ввода-вывода общего назначения (GPIO);
универсальный асинхронный порт (UART) типа 16550;
32-разрядный интервальный таймер (IT);
32-разрядный таймер реального времени (RTT);
32-разрядный сторожевой таймер (WDT).
Дополнительные возможности и особенности:
Узел фазовой автоподстройки частоты (PLL) c умножителем/делителем входной частоты;
Встроенные средства отладки программ (OnCD);
Порт JTAG в соответствии со стандартом IEEE 1149.1;
Рассеиваемая мощность, мВт, около 1200 (максимальная); режимы энергосбережения: 700 - при неработающем DSP-ядре (режим Stop); 70 - при программном уменьшении тактовой частоты в 16 раз; 30 - при программном отключении тактовой частоты (включение тактовой частоты осуществляется по внешним прерываниям);
Корпус: пластиковый корпус PQFP-240.
«Система на кристалле» (СНК или SOC) = MCS+ DSP – это узкоспециализированная микросхема (пример, чип банковской карты, зональный пропуск, карточка в метро)
«Программируемая система на кристалле»(PSOC)
Термин «система на кристалле» появился применительно к мегавентильным микросхемам, поскольку на них можно разместить целую систему (процессор, память, интерфейсные схемы и др.). «Программируемые системы на кристале» выпущены около 10 лет назад. Их современные варианты содержат уже десятки-сотни миллионов эквивалентных вентилей (миллиарды транзисторов), а их тактовые частоты составляют сотни мегагерц/ или даже превышают гигагерц. Системы на одном кристалле имеют улучшенные технические и экономические качественные показатели. Интеграция функциональных блоков в одном кристалле повышает быстродействие и надежность систем, уменьшает потребляемую ими мощность и стоимость.
IP-ядра. Блочное и платформенное проектирование
IP-блоки для схем программируемой логики могут быть представлены в разной форме. Различают варианты:
- soft-ядра – это файлы, определяющие конфигурирование некоторой области кристалла таким образом, что в ней создается устройство заданного типа. Эти файлы можно интегрировать в описание проектируемого устройства на языке HDL(Hardware Description Language);
- firm-ядра – это вариант, близкий к предыдущему, его применяют для блоков, быстродействие которых особенно важно. В этих ядрах задание схемы является более жестким, чем в файле поведенческого описания, свойственного soft-ядрам, поскольку в описании firm-блока предопределены некоторые схемные межсоединения;
- hard-ядра представляют собой реализованные на кристалле области с фиксированными функциями(устройства).
Типы программируемых «систем на кристалле»
Все программируемые «системы на кристалле» подобны друг другу тем, что синтезируются с помощью ядер. Из практических соображений целесообразно выделить два типа PSOC:
- однородные
- блочные
Системы однородного типа. Это системы на микросхемах высшей сложности и производительности, в которых применяются преимущественно soft-ядра, реализуемые схемотехнически однотипными ресурсами в тех или иных областях кристалла благодаря их программируемости. Такие системы ориентированы главным образом на телекоммуникации, сетевые приложения, обработку изображений и речи и другие мультимедийные задачи. Эти системы назовем однородными, имея в виду идентичность логических ресурсов, размещенных на кристалле и применяемых для построения требуемых устройств.
Системы блочного типа
Это системы умеренной сложности и производительности, ориентированные на задачи управления техническими объектами и технологическими объектами и технологическими процессами. В таких системах наряду с синтезируемыми ядрами широко применяются hard-ядра, т.е. на кристалле выделяются области с фиксированными функциями, не содержащие средств программирования структуры. С учетом структуры эти системы можно назвать блочными. Кроме того, согласно главной области применения подобные системы можно назвать микроконтроллерными. Программируемая часть блочных PSOC обычно имеет архитектуру FPGA.
Системы на кристалле серии PSoC(Programmable System on Chip), в которых сочетаются конфигурируемые цифровые и аналоговые программируемые блоки. В серии PSOC выпущены три семейства: PSOC 1 с процессором M8C (тактовая частота 24 МГц), PSOC 3 с процессором 8051 (67 МГц) и PSOC 5 с процессором ARM Cortex-M3 (80 МГц). Семейство этой серии, обладающее архитектурными новшествами и большими возможностями относительно своих предшественников - PSOC 5. В этом семействе некоторые аналоговые компоненты, реализованные на кристалле, тем не менее обладают разрешающей способностью, соответствующей 20 двоичным разрядам, используемое 32-разрядное ядро процессора ARM Cortex-M3 работает на частоте до 80 МГц, схема потребляет ультранизкую мощность. Сочетание процессора с хорошо развитыми гибкими гибкими средствами аналоговой и цифровой обработки данных, а также обширными средствами их ввода-вывода, придает системе PSOC 5 широкую область применений в промышленных, потребительских, медицинских и других приложениях. Подсистема процессора строится вокруг 32-разрядного ядра ARM Cortex-M3 с трехступенчатым конвейером, работающего на частотах до 80 МГц. В подсистеме имеется контроллер вложенных векторных прерываний, контроллер прямого доступа к памяти (24 канала), а также контроллер флэш-кэша, который ускоряет работу с памятью, а также способствует снижению потребляемой мощности, благодаря более редким обращениям к основной флэш-памяти. Подсистема памяти снабжена устройствами типа программной памяти флэш (256 Кбайт), EEPROM с байтовой записью (2 Кбайта для пользовательских данных), SRAM (64 Кбайта). Подсистема отладки и программирования широко использует интерфейс JTAG (4 линии) или Serial Wire Debug (2 линии). Допустимая работы микросхемы от стандартных источников напряжений 1,8 В + 5%; 2,5 В+10%; 3,3 В + 10%; 5 В + 10% или непосредственно от батарей разных типов. Имеется встроенный конвертор, благодаря которому можно питать схему от источников столь малых напряжений, как 0,5 В, и вырабатывать нестандартные напряжения. Возможны четыре режима малого потребления мощности: активный ( с током потребления 2 мА при частоте тактирования 6 МГц), ожидания (с током 20 мкА и временем выхода в активный режим менее 1 мкс), спящий (2 мкА и менее 12 мкс) и hibernate (буквальный перевод – находящийся в зимней спячке) с параметрами 300 пА и менее 100 мкс).
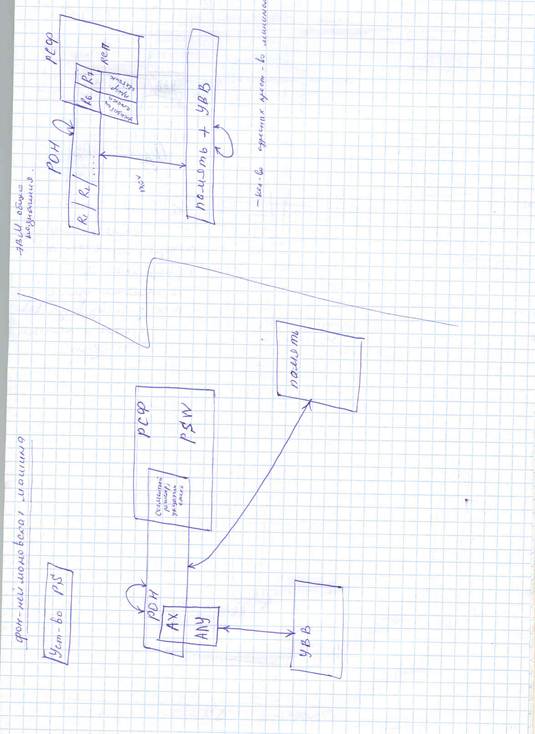
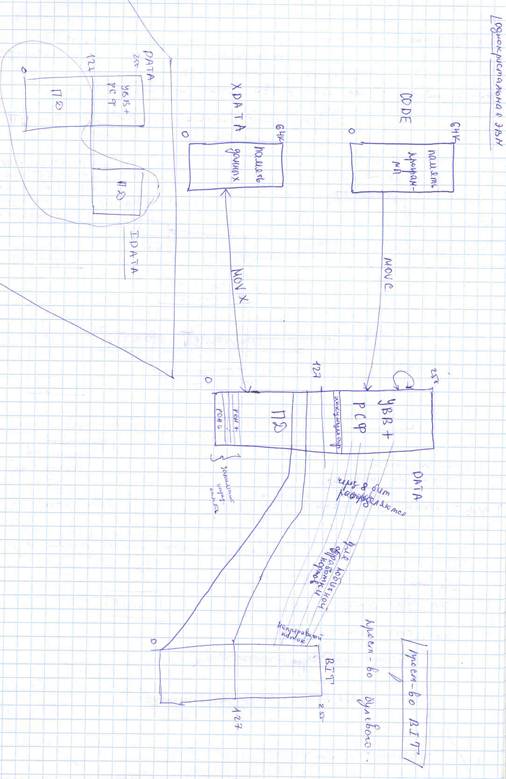
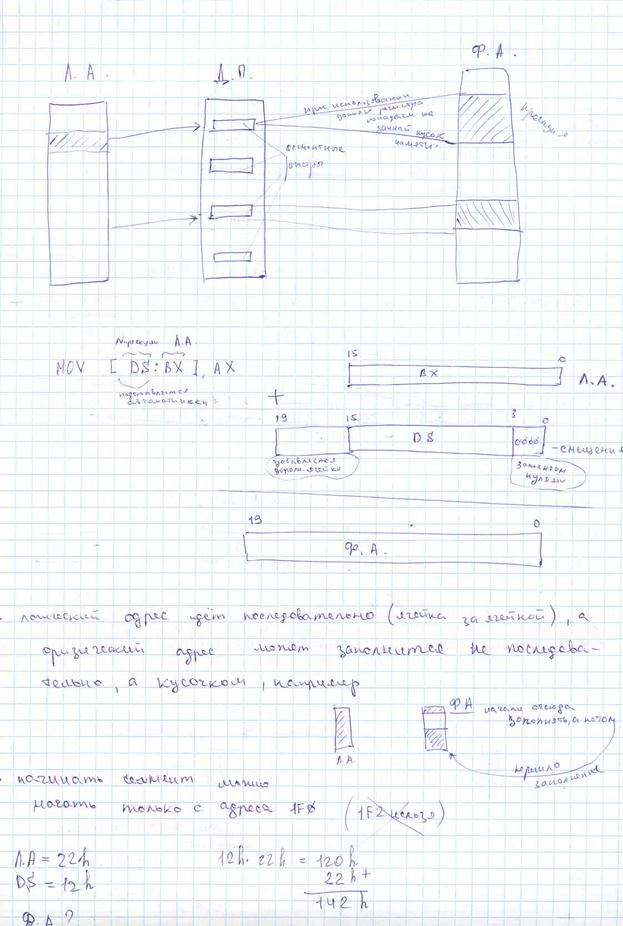
Понятие адресного пространства. Совмещенные и параллельные адресные пространства: основные архитектурные и схемотехнические признаки.
Адресные пространства. Совокупность адресов, которые могут быть использованы процессором, образует адресное пространство микропроцессорных систем. Адреса памяти могут занимать все адресное пространство (АП) или его часть, а линейно организованная память независимо от ее технической реализации может быть условно представлена набором регистров (ячеек), число которых М, а разрядность – N. Диапазон адресов, к которым может обращаться процессор (т.е. емкость АП) связан с разрядностью шины адреса m соотношением АП=2m. Например, с помощью 16-разрядной шины адреса можно адресовать 216 = 64 К объектов, с помощью 20-разрядной 1М объектов и т.д. АП используется блоками ОЗУ, ПЗУ и ВУ, к которым обращается процессор. Для оценки емкостей АП используются обычно единицы измерения К=210=1024, М=220, Г=230. Адреса в АП обычно выражают в шестнадцатеричной системе счисления.
W1
K
N
M
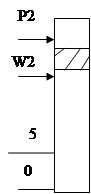
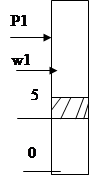
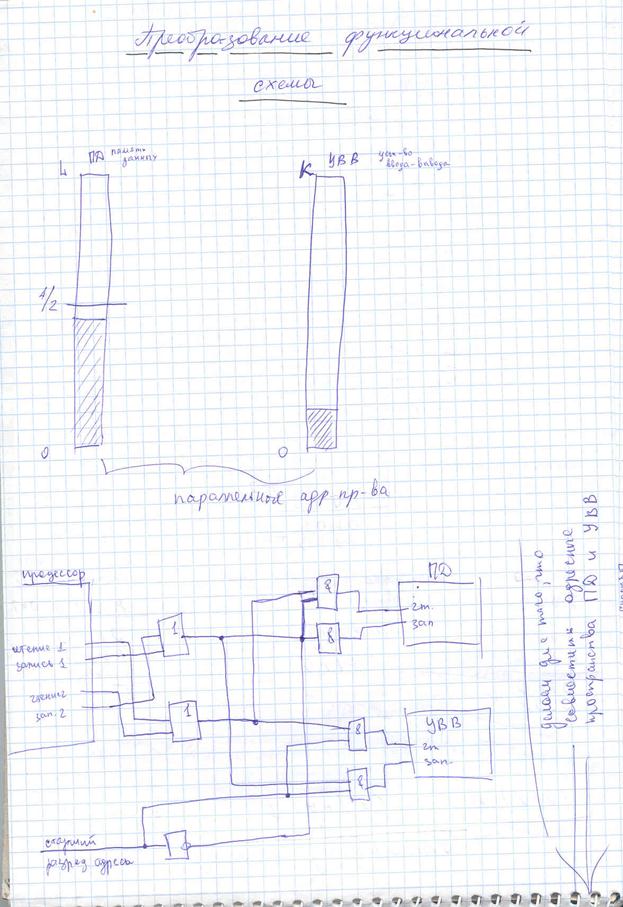
Параллельные совмещенные адресные пространства
Отличия. В параллельных адресных пространствах есть ячейки с одинаковым номером (попадаем за счет разных команд). Гарантия совмещенных адресных пространств – это одна команда, позволяющая попасть в разные ячейки. Это программные способы.
В параллельных 2 разных набора сигналов (P1, W1, P2, W2). Это аппаратные способы.
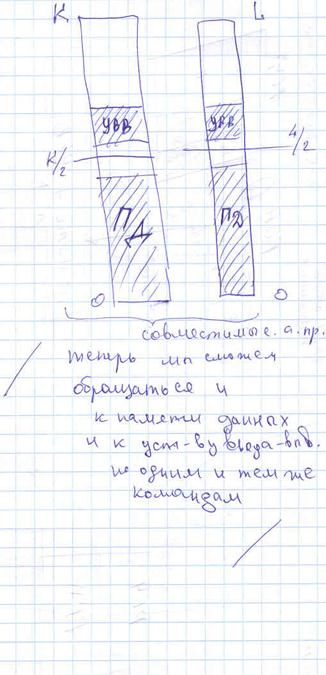
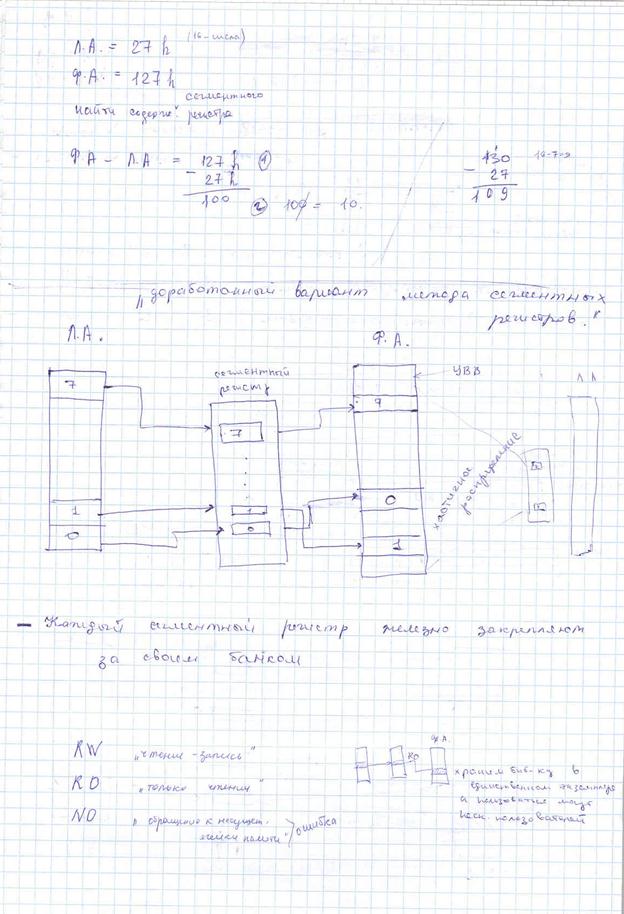
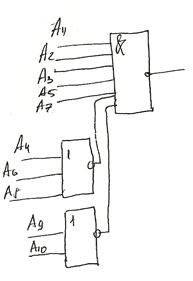
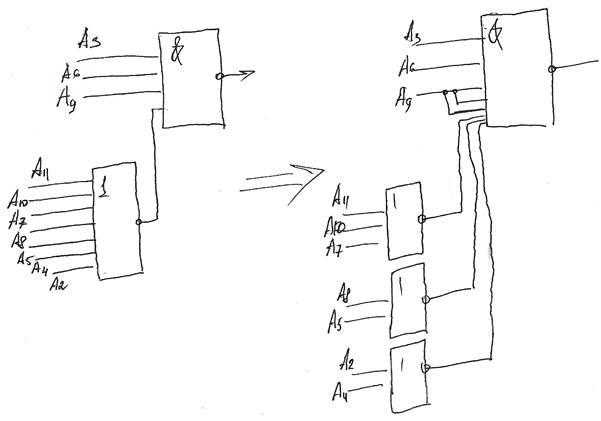
Преобразование функциональной схемы
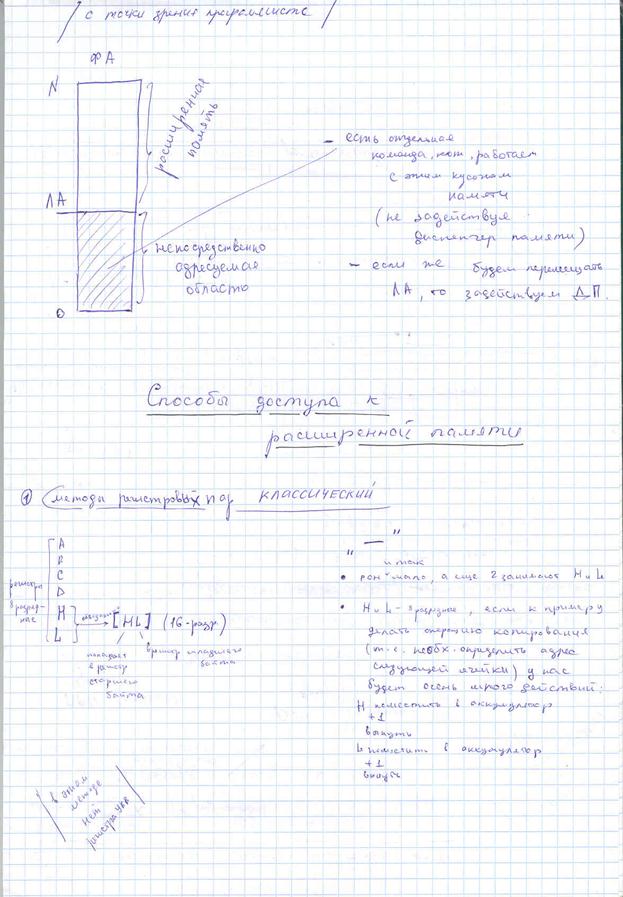
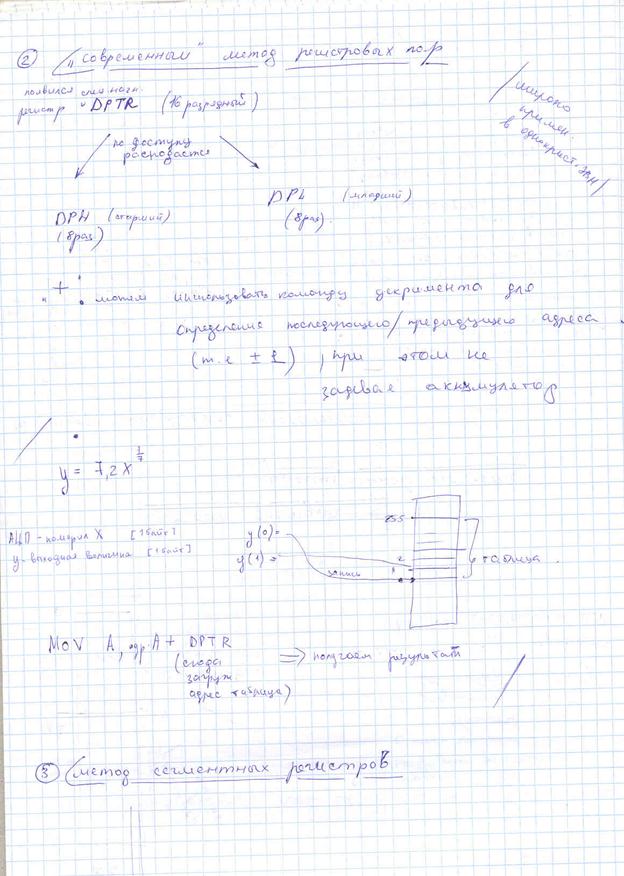
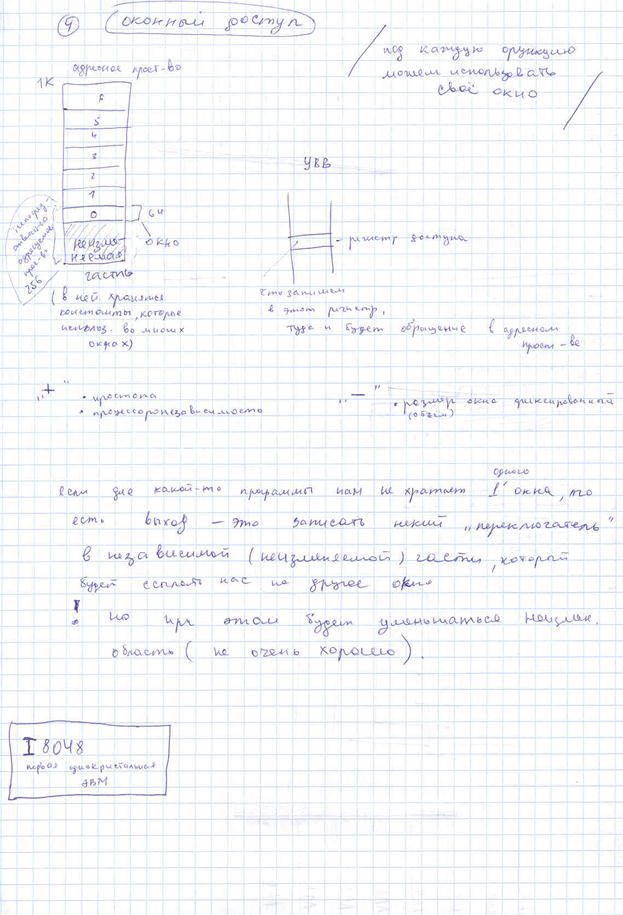
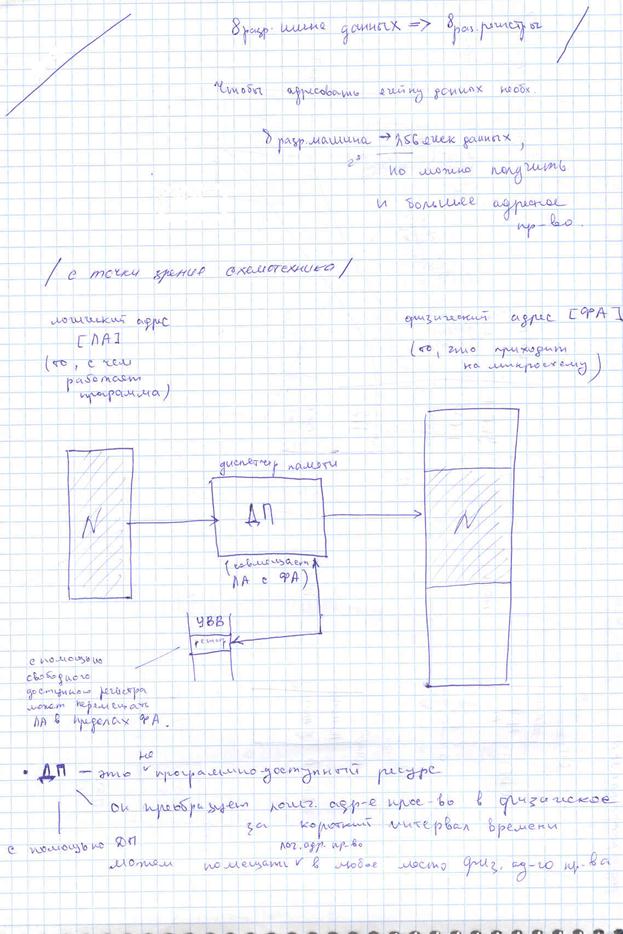
Расширенное адресное пространство: понятие, основные методы доступа.
Диспетчер памяти: назначение, основные элементы устройства.
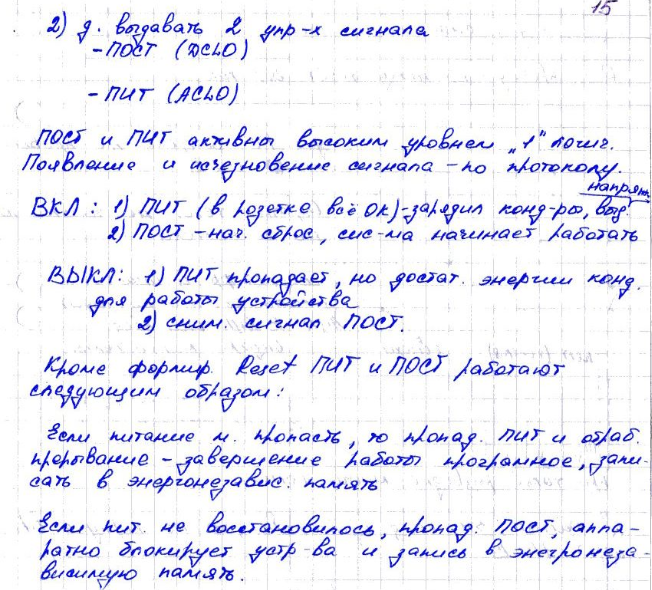
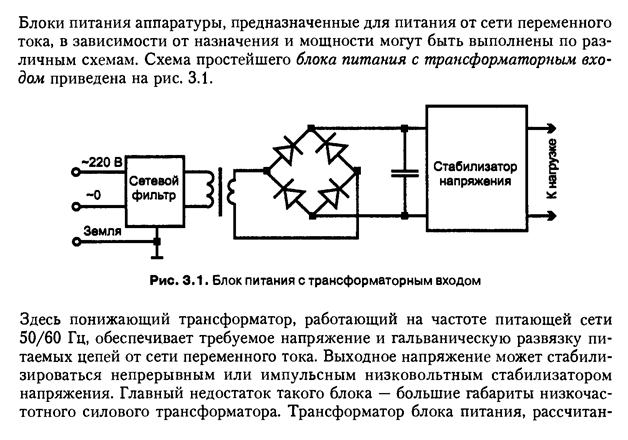
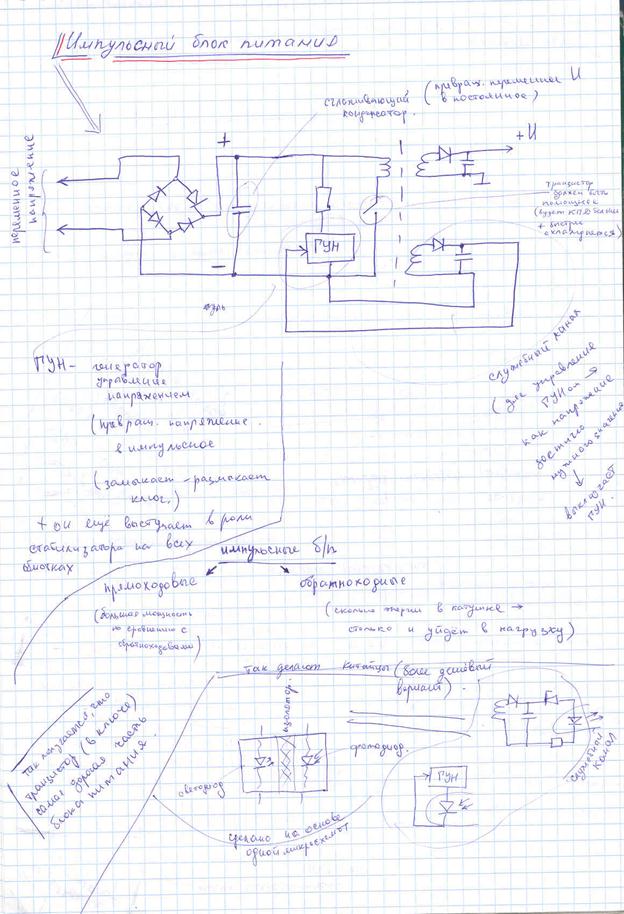
Основные специфические требования, предъявляемые к блоку питания МПУ и их необходимость.
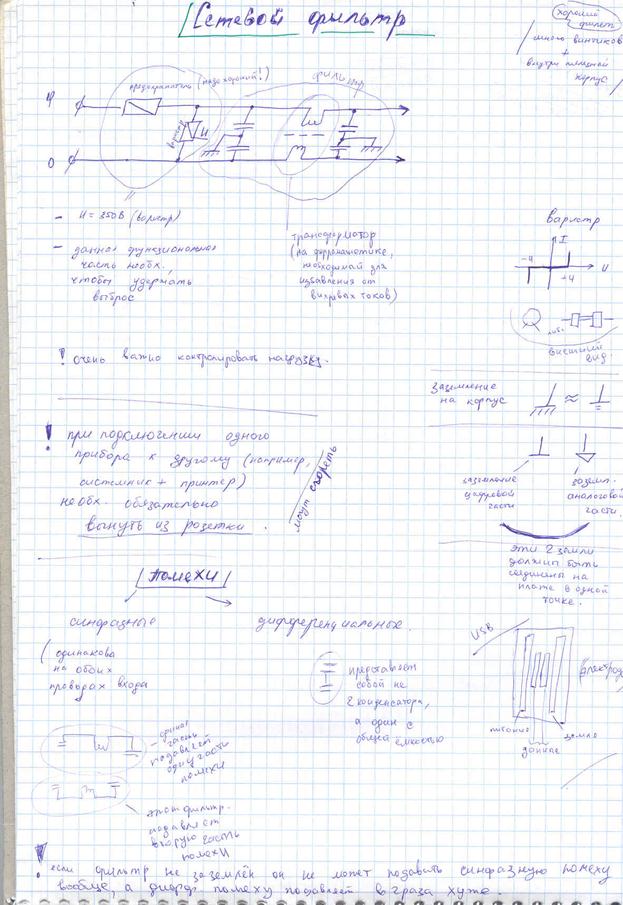
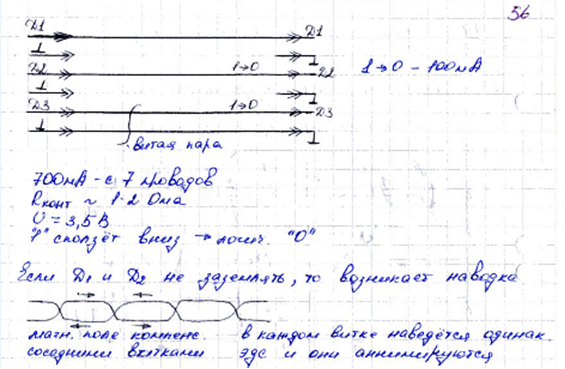
Сетевой фильтр: устройство, работа с синфазной и парафазной помехами.
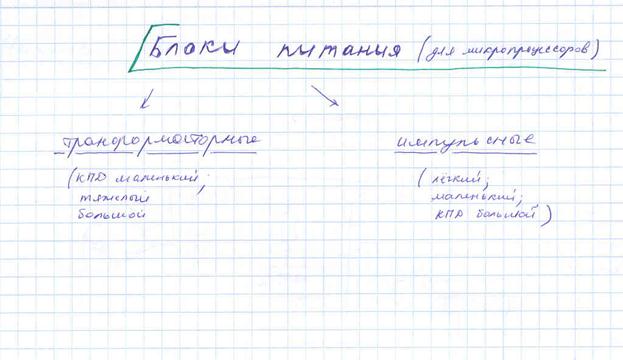
Сравнительные характеристики трансформаторных и импульсных блоков питания в следующие из этого ограничения области применения
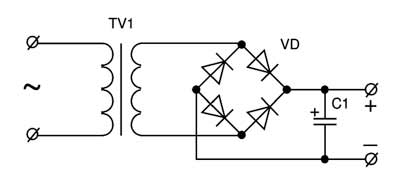
Трансформаторный блок питания.
U
балласт
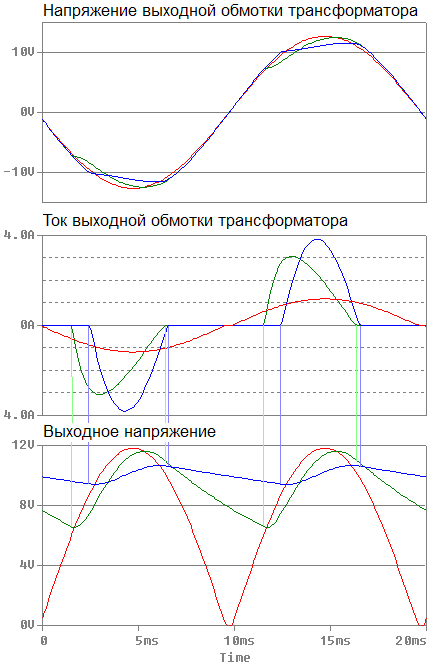
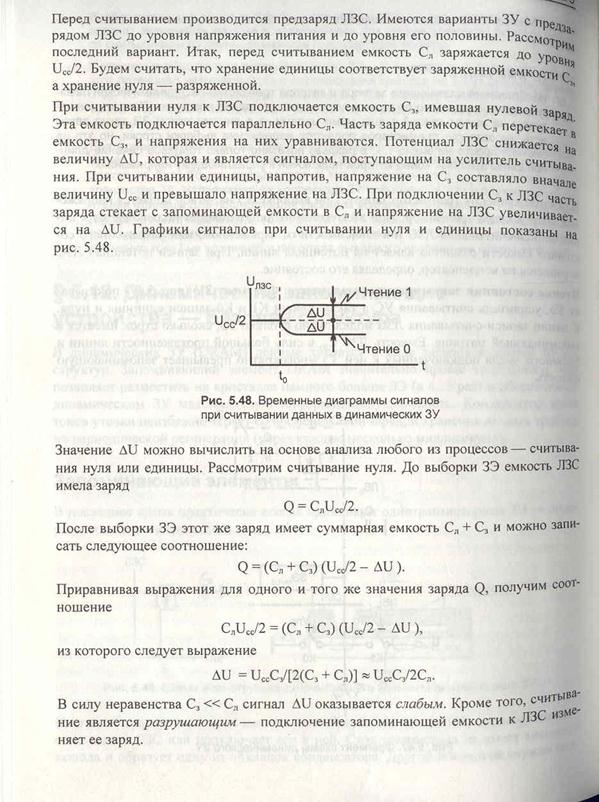
R=ωL – реактивное сопротивление. Любой блок питания является источником помех для других приборов. Выходной конденсатор сглаживает пульсации выходного напряжения. Дело в том, что трансформатор «предоставляет» напряжение той же формы, что и в сети 220 вольт, а именно синусоидальной. К слову, при работе от бесперебойных источников его форма может быть далеко не синусоидальной. Форма выпрямленного напряжения непостоянна во времени, наличествует длительное снижение до нуля вольт, поэтому необходима установка элемента, поддерживающего выходное напряжение постоянной величины, что выполняется на сглаживающем конденсаторе. Рассмотрим происходящие процессы подробнее, на модели блока питания 10 В.
На картинке представлены напряжения, токи вторичных обмоток трансформатора и выходных напряжений для трех вариантов:
1. (красный). Выходной конденсатор отсутствует.
2. (зеленый). Выходной конденсатор присутствует, но его емкости явно недостаточно.
3. (синий). Выходной конденсатор обладает достаточной емкостью.
Форма напряжения на выходной обмотке, в первом приближении, остается синусоидальной для всех трех случаев, но только в первом – обмотки трансформатора намотаны медным проводом, и хотя медь хорошо проводит электрический ток, но ее используется довольно много, а потому сопротивление обмоток весьма чувствительно по величине. Чем больше ток нагрузки, чем она более «импульсная», тем сильнее искажается напряжение на выходе трансформатора.
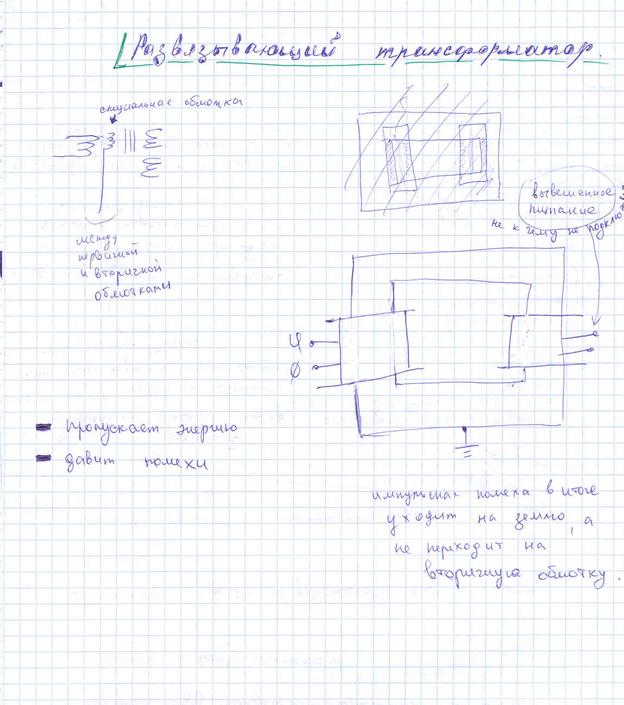
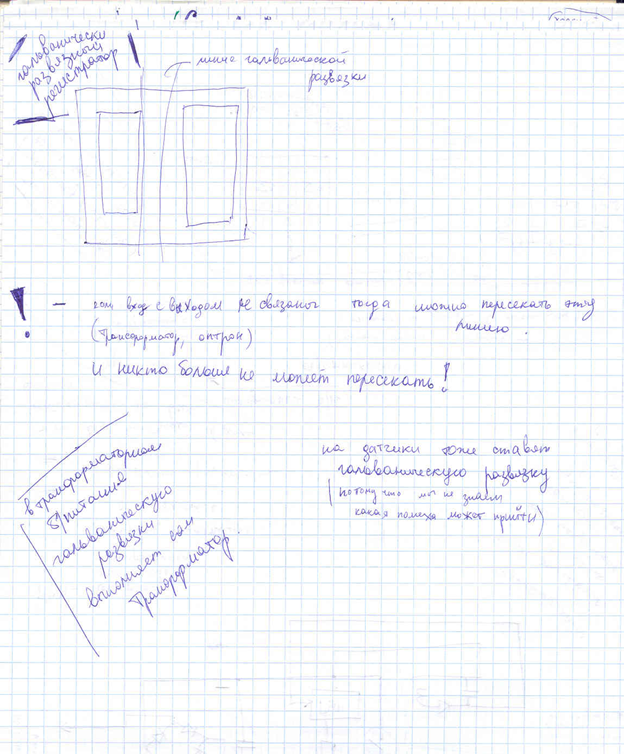
Разделительный трансформатор: понятие, особенности конструкции и применения.
Понятие гальванической развязки: назначение, виды, особенности конструкторского и схемотехнического исполнения.
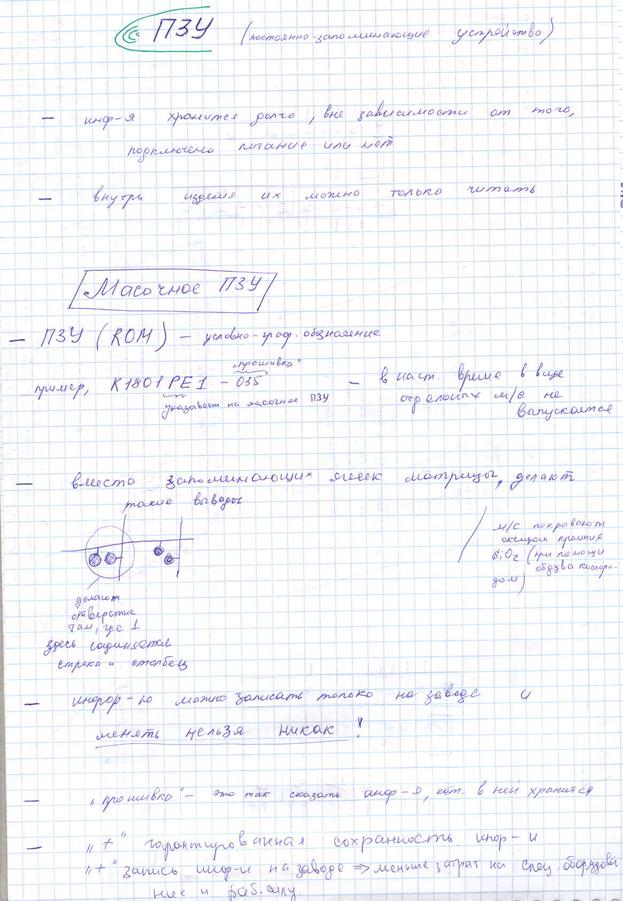
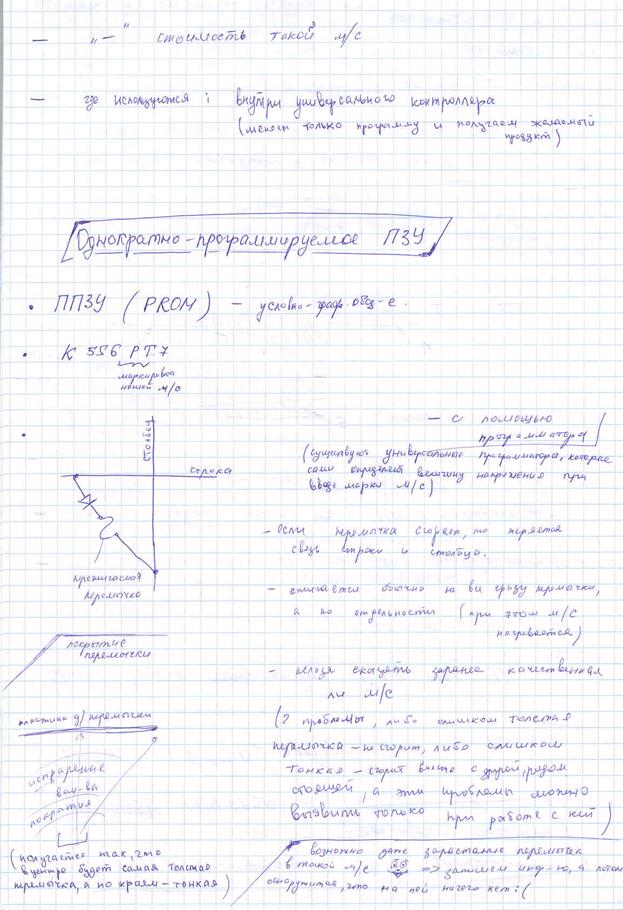
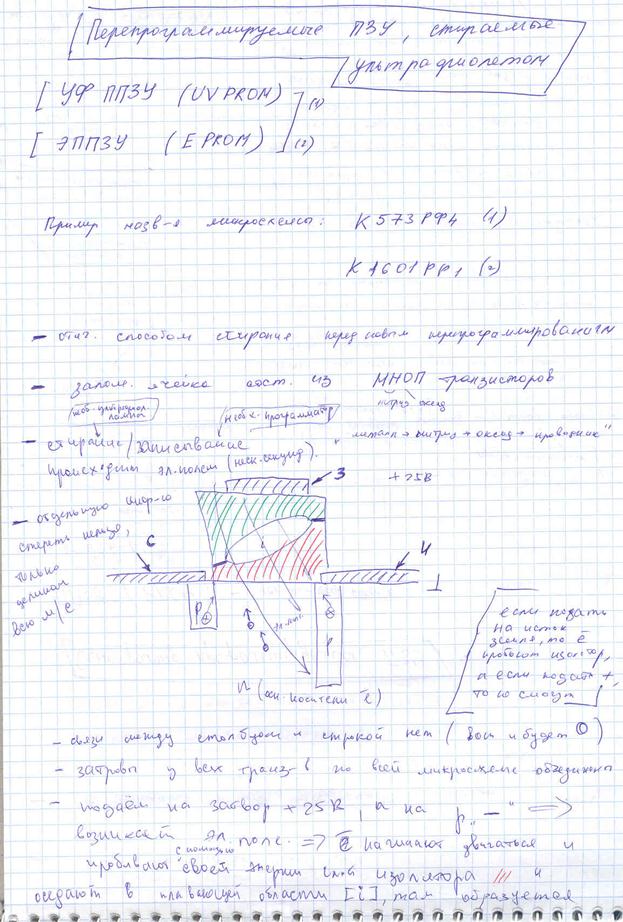
Виды ПЗУ: особенности применения и программирования. Flash ПЗУ.
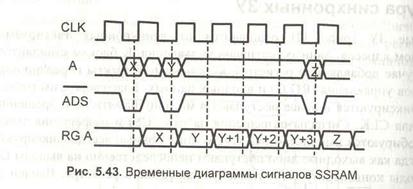
Статическое ОЗУ: основные технологии (КМОП, FRAM), особенности применения. Построение энергонезависимого ОЗУ.
ОЗУ. При отключении питания информация теряется. ОЗУ может и читать, и писать одновременно.
Статические ОЗУ
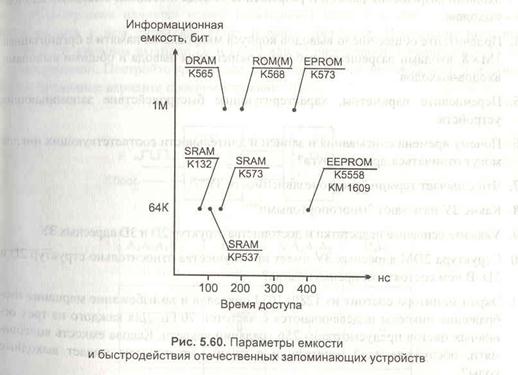
В качестве ячейки памяти имеет минимальный элемент с памятью – триггер. Типичная номенклатура SRAM зарубежных фирм представлена сейчас микросхемами с информационной емкостью в диапазоне от 64 Кбит до 16 Мбит и временами доступа 10…15 нс. Среди отечественных микросхем можно отметить серии К537 технологии КМОП и К132 технологии n-МОП.
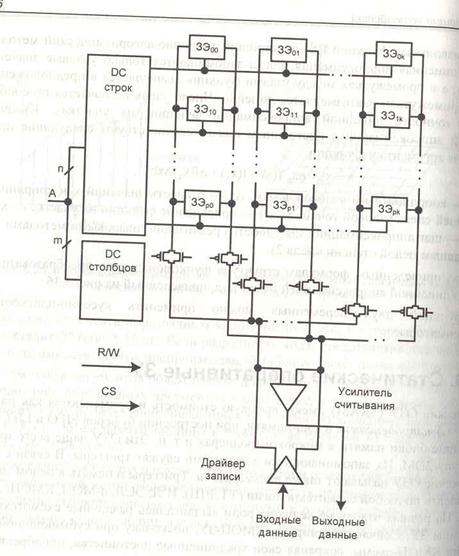
Структура асинхронного ЗУ
Адрес ячейки А делится на поля с разрядностями n и m. Дешифратор строк, получая n-разрядный код, выбирает в матрице одну из 2n строк (p=2n – 1). Запоминающий триггер имеет прямой и инверсный выходы, поэтому столбец матрицы представлен двумя линиями (парафазно). Дешифратор столбцов управляет ключами, выбирающими один из 2m столбцов (k=2m – 1) для подключения к дифференциальному выходу формирователя данных при записи.
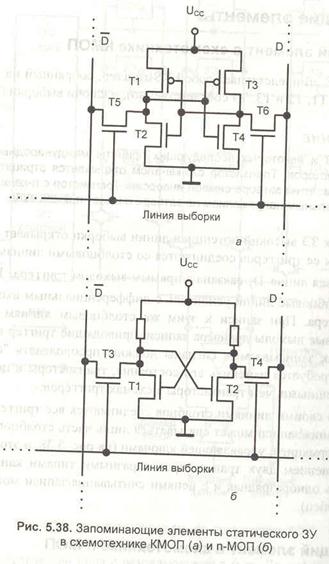
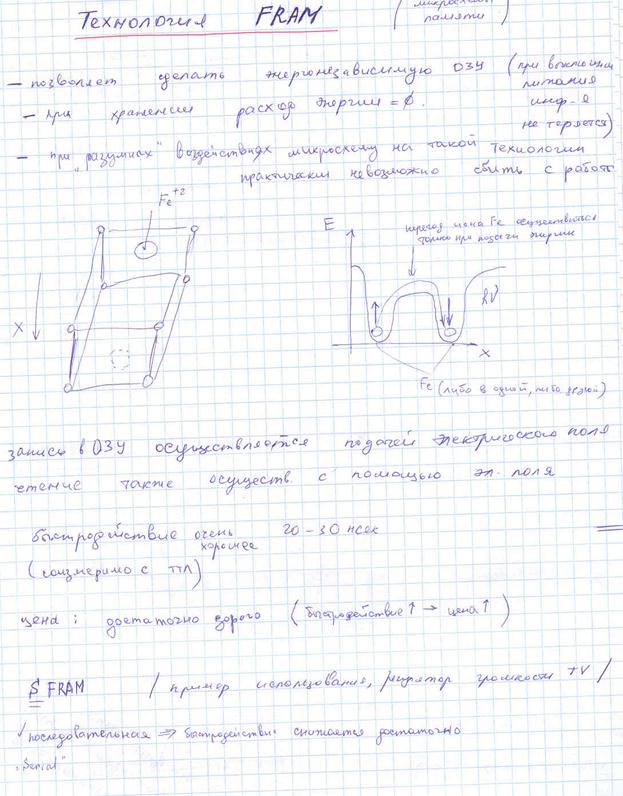
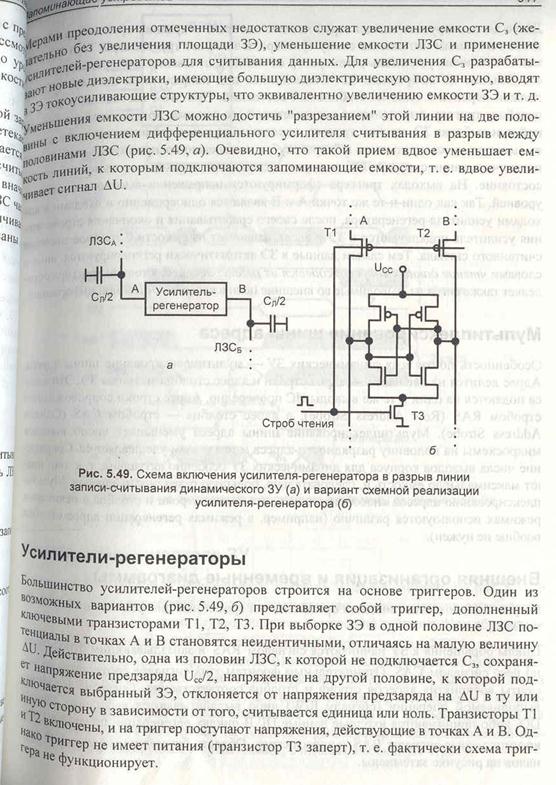
Запоминающие элементы
Запоминающий элемент (ЗЭ) в схемотехнике КМОП
Этот ЗЭ представляет собой RS-триггер, собранный на двух инверторах (транзисторы Т1, Т2, Т3, Т4 соответственно), и ключи выборки (Т5 и Т6). При обращении к ЗЭ высокий потенциал линии выборки открывает ключи по всей строке, и выходы ее триггеров соединяются со столбовыми линиями считывания-записи (столбовая линия Dj связана с прямым выходом триггера, Dj- - с инверсным). Через столбцовые линии усилитель с дифференциальным входом считывает состояние триггера. При записи к этим же столбцовым линиям подключаются дифференциальные выходы драйвера записи, приводящие триггер в требуемое состояние.
Запоминающий элемент в схемотехнике n-МОП
Этот ЗЭ функционирует принципиально также, как и описанный ранее, но инверторы, входящие в схему триггера, в стоковых цепях имеют высокоомные поликремневые резисторы, пространственно расположенные над транзисторами, что придает схеме как режим микротоков, так и высокую компактность.
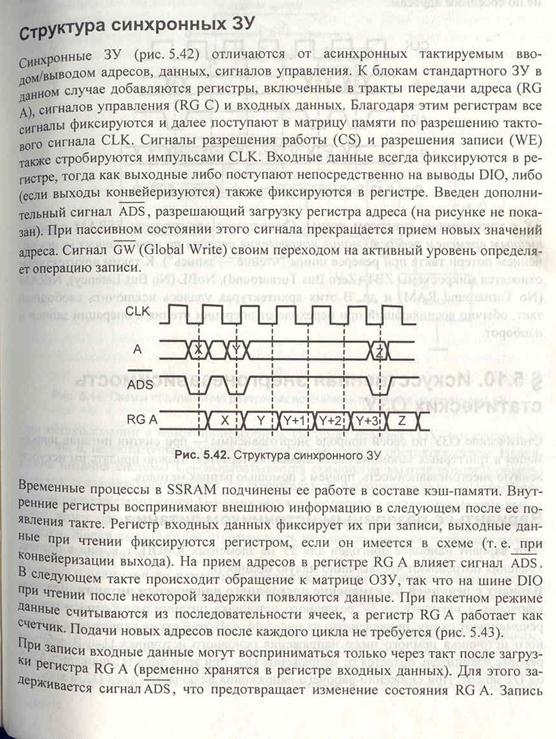
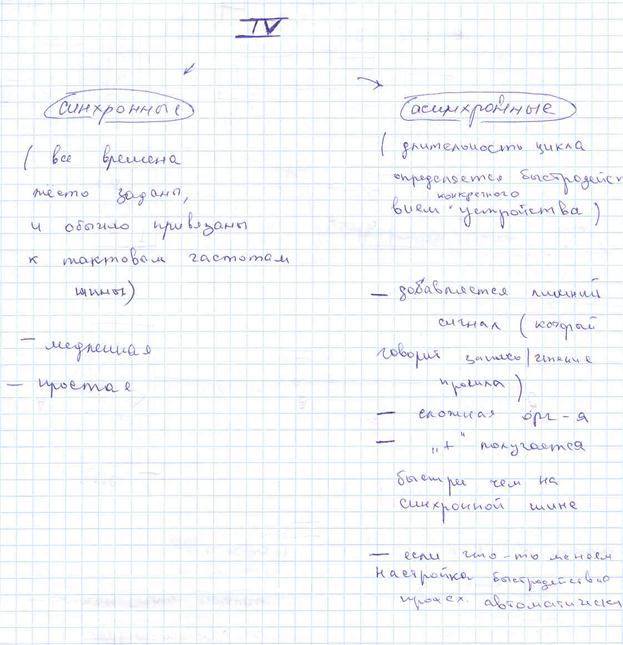
Синхронные ЗУ
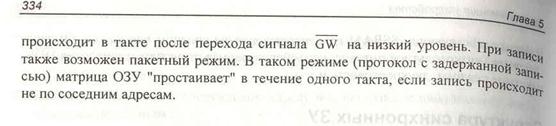
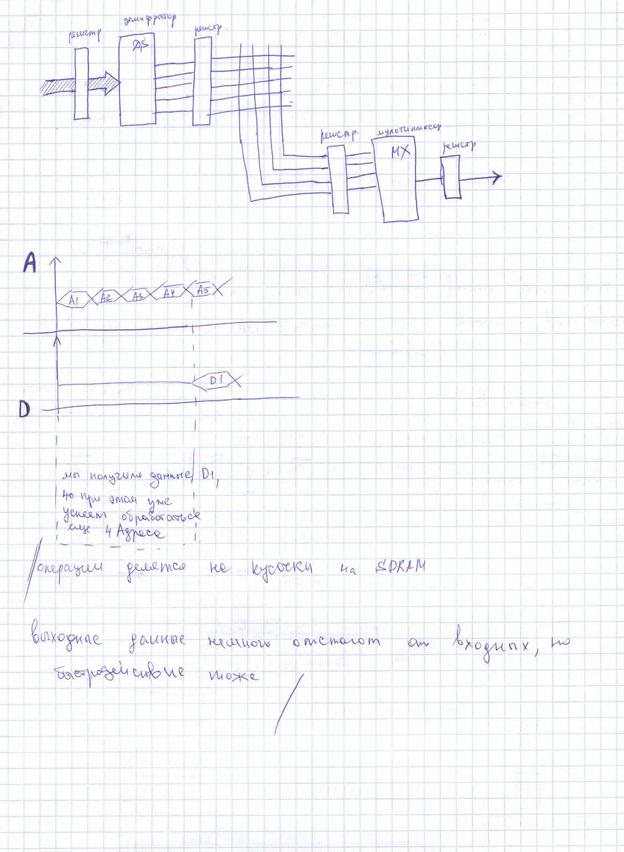
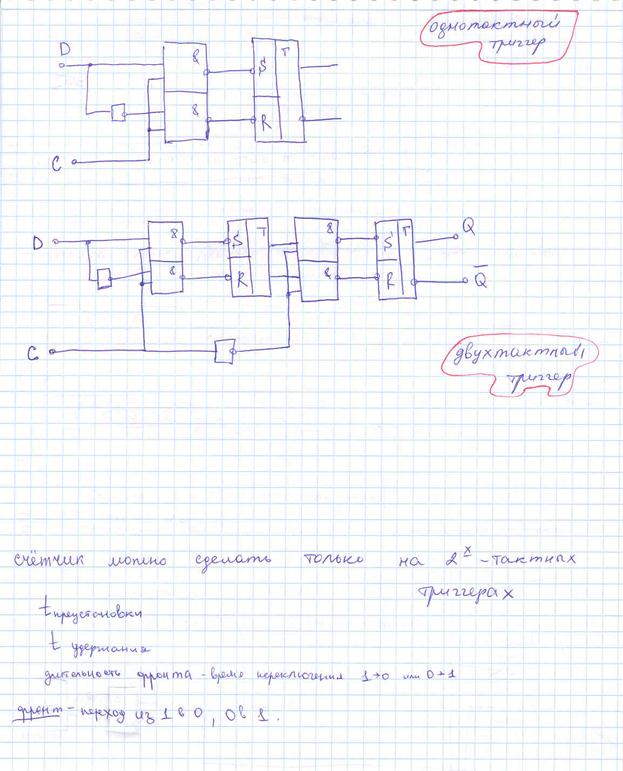
Синхронные статические ЗУ (SSRAM) имеют модифицированный интерфейс для согласования работы ЗУ с системой тактирования процессора и могут работать со сквозной или конвейерной передачей данных. В синхронных ЗУ моменты изменения всех сигналов точно известны, они фиксируются фронтами тактового сигнала CLK, вырабатываемого процессором.
Сигналы:
- тактовый сигнал процессора (системы) CLK;
- стробы, которыми процессор или контроллер записывают адрес во внутренний регистр микросхемы и инициируют очередной цикл обращения к памяти (пакетный или одиночный);
- сигнал для перехода к следующему адресу в пакете.
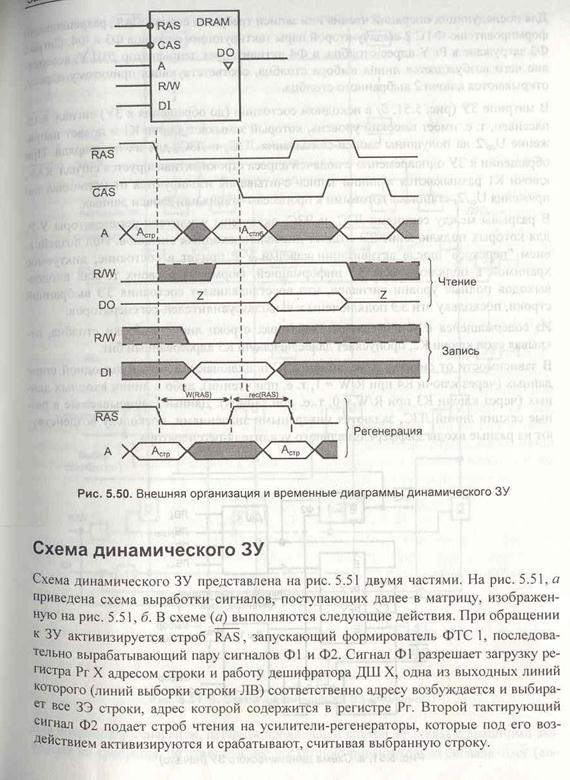
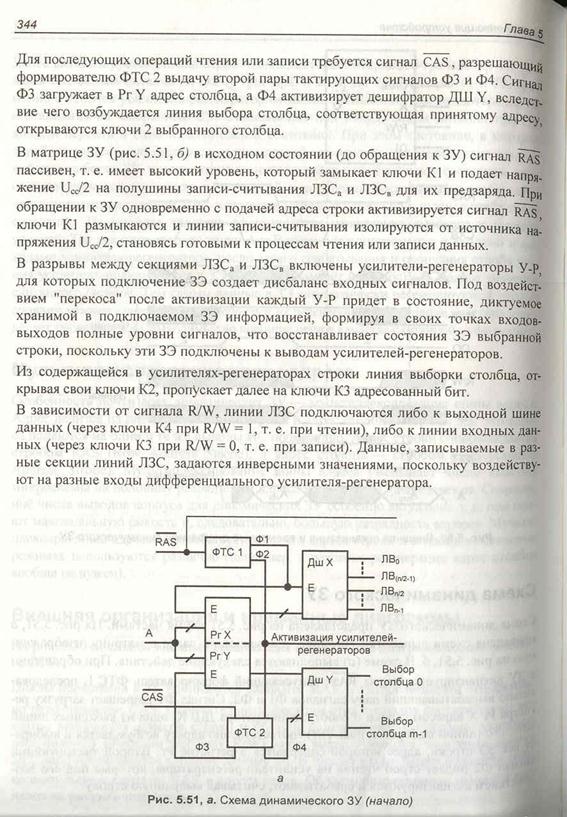
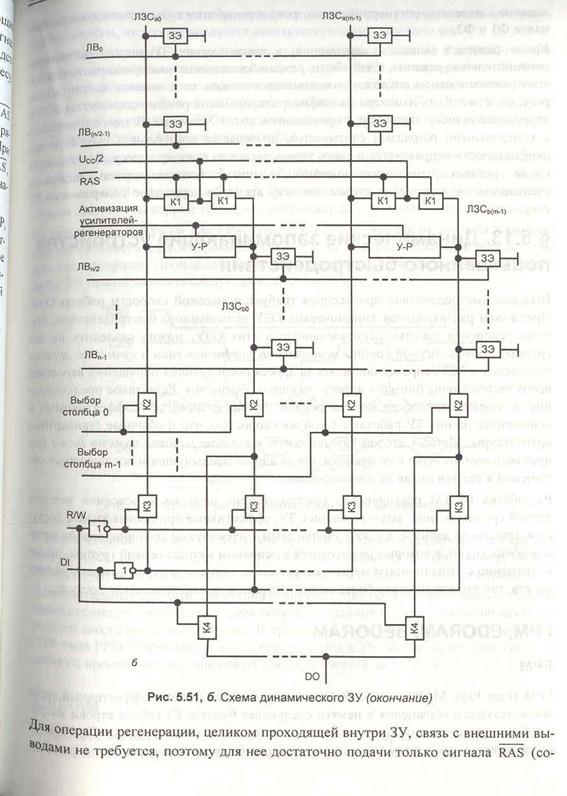
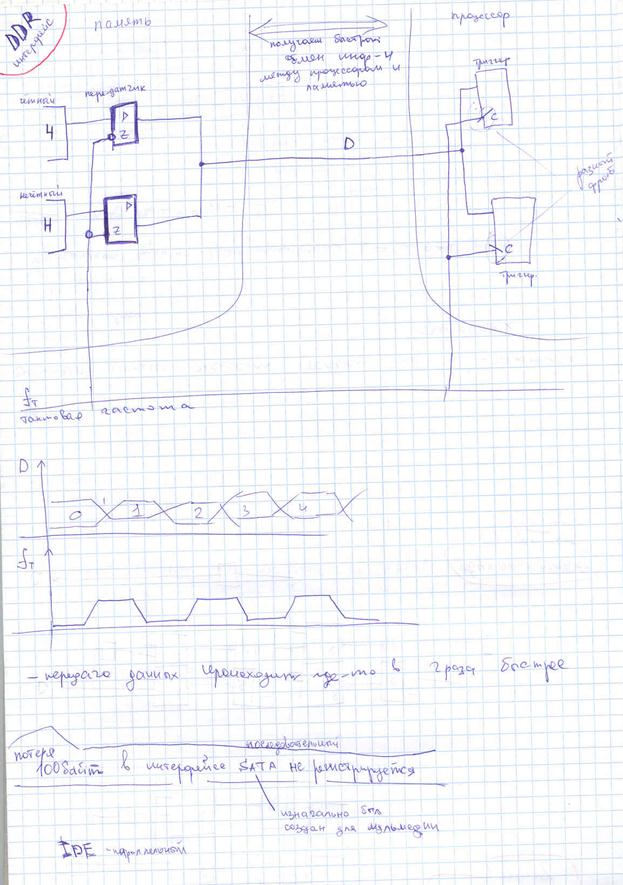
Динамическое ОЗУ: особенности использования, проблема регенерации и пути её решения.
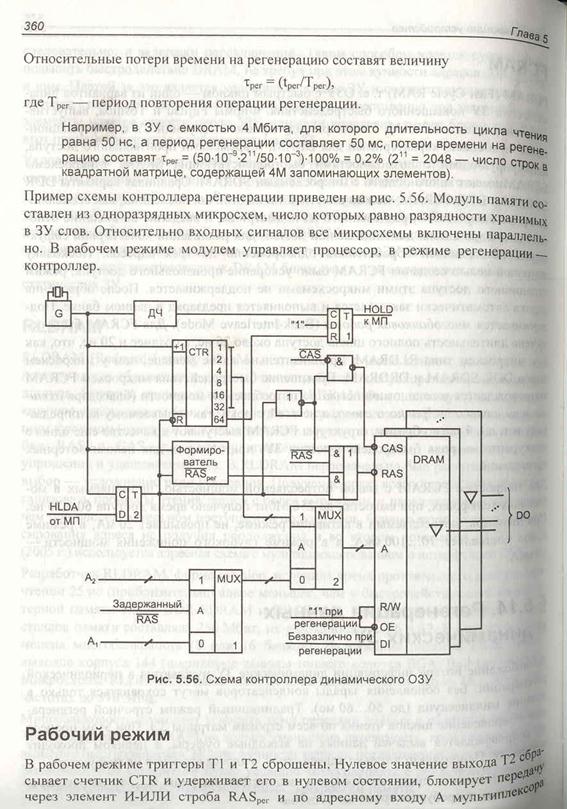
Динамическое ОЗУ: циклы RAS-CAS, принципы, реализуемые технологиями DDR и SDRAM.
Сравнительные характеристики статической и динамической памяти (по параметрам быстродействие – объём).
Информационные емкости основных разновидностей современных микросхем памяти:
- для SDRAM от 2 до 512 Мбит;
- для SRAM малой мощности от 2 до 16 Мбит.
Быстродействие статических ОЗУ характеризуется тактовыми частотами в 250 МГц.
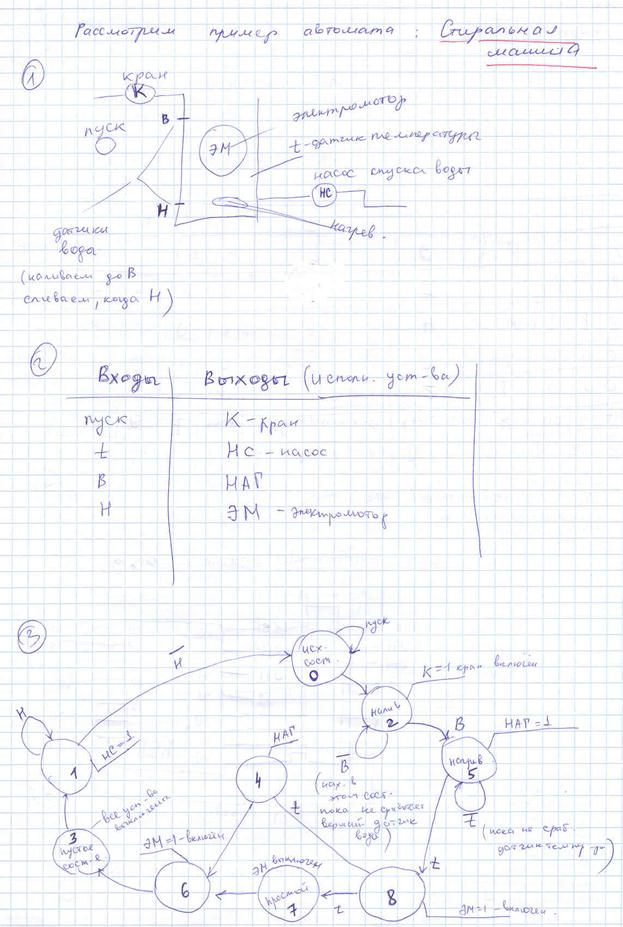
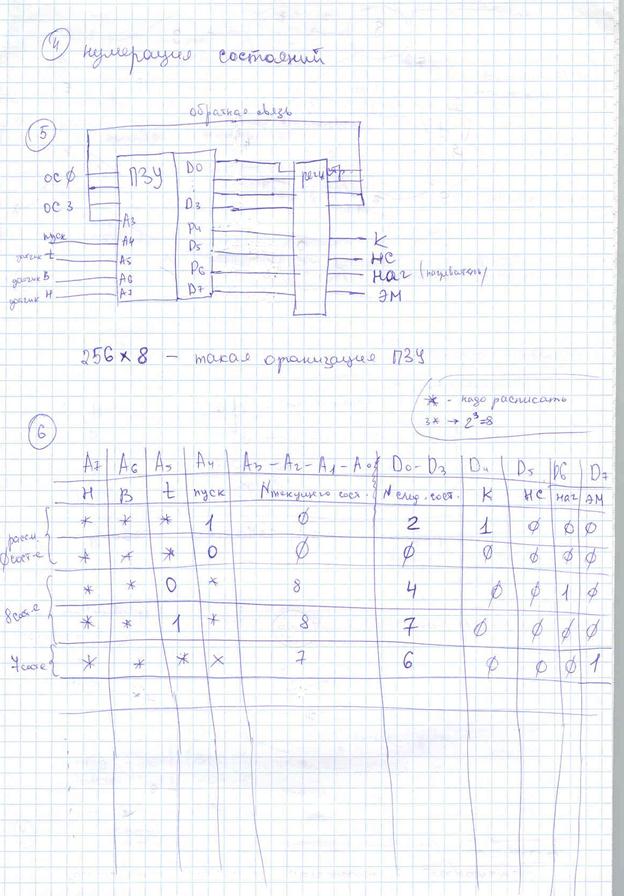
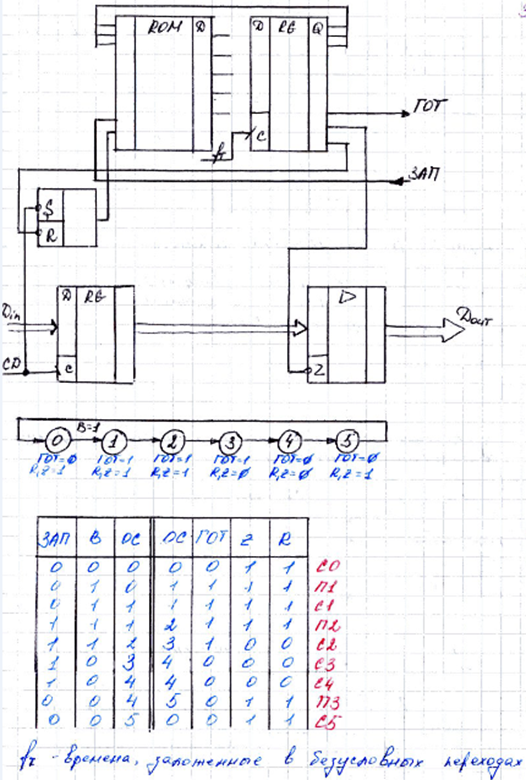
Типовой управляющий автомат: методика синтеза (на примере)
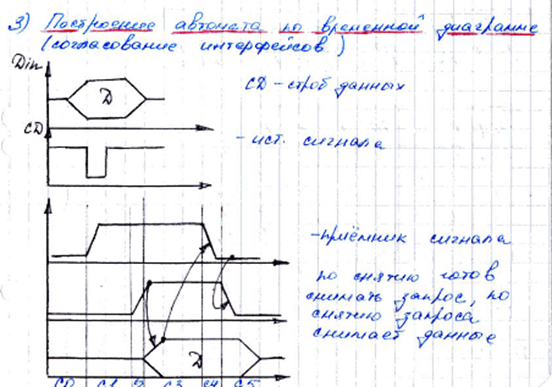
Автомат управления межшинным мостом: методика синтеза.
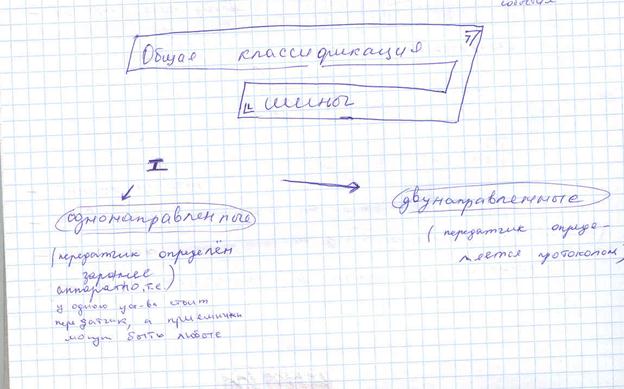
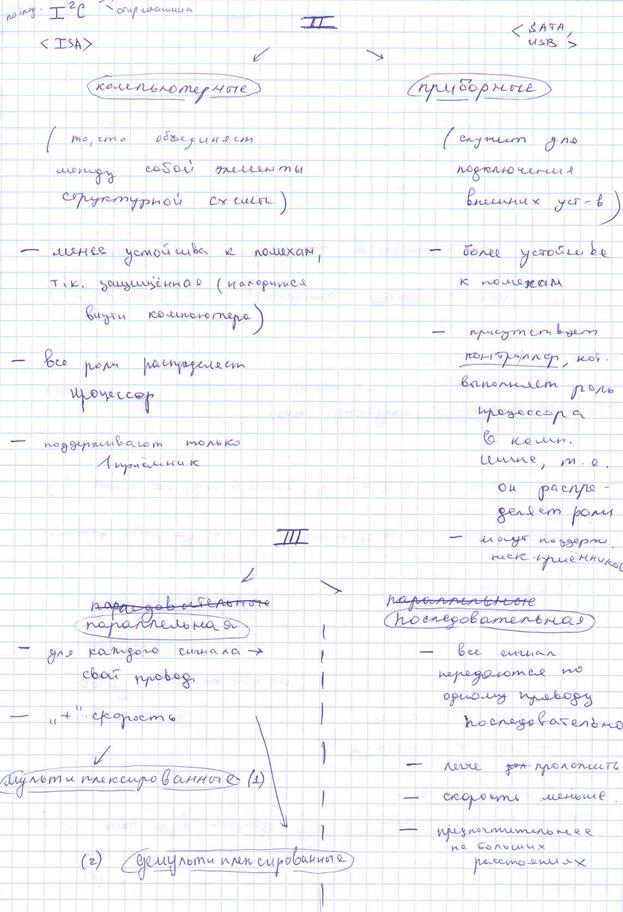
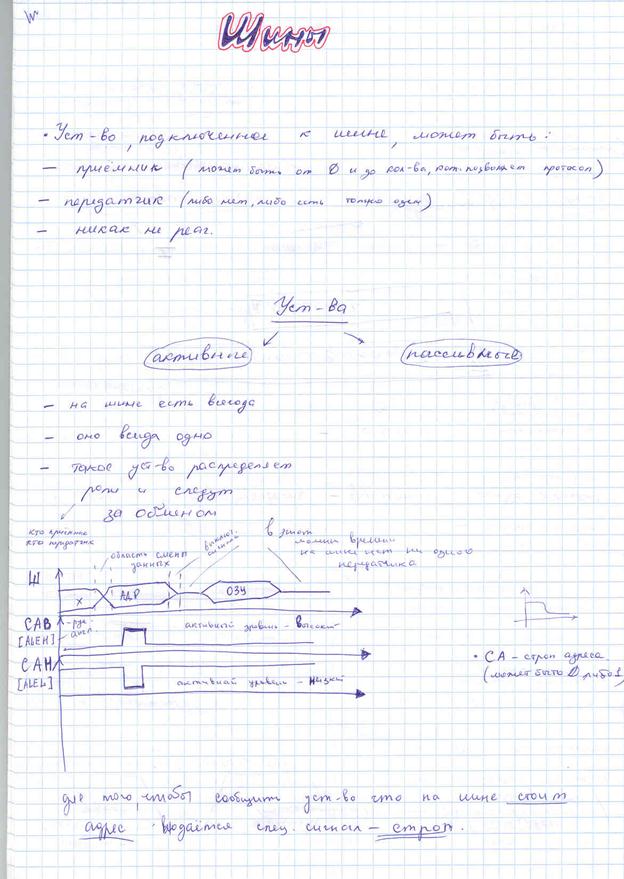
Классификация шин
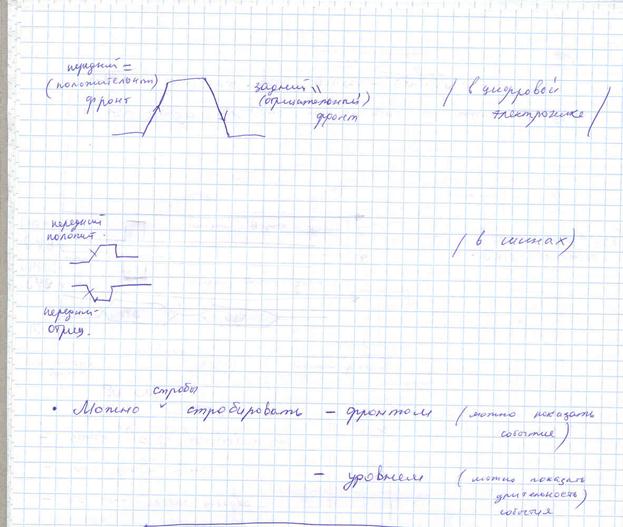
Понятие стробирующего сигнала (строба), его назначение. Понятие активного уровня строба и способ его кодирования в названии.
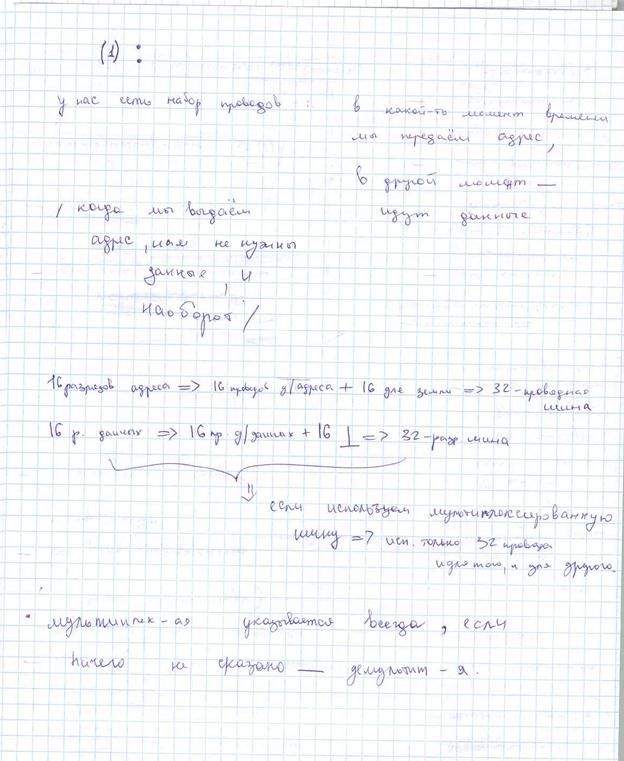
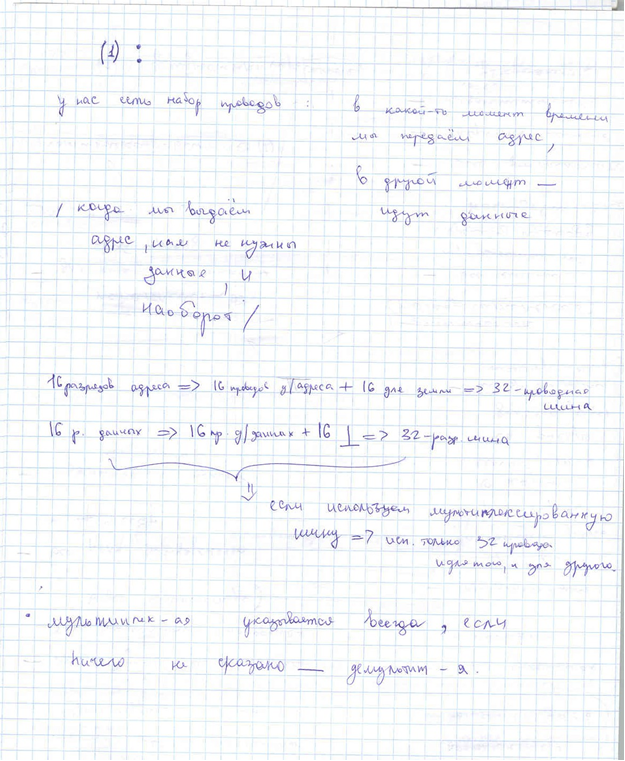
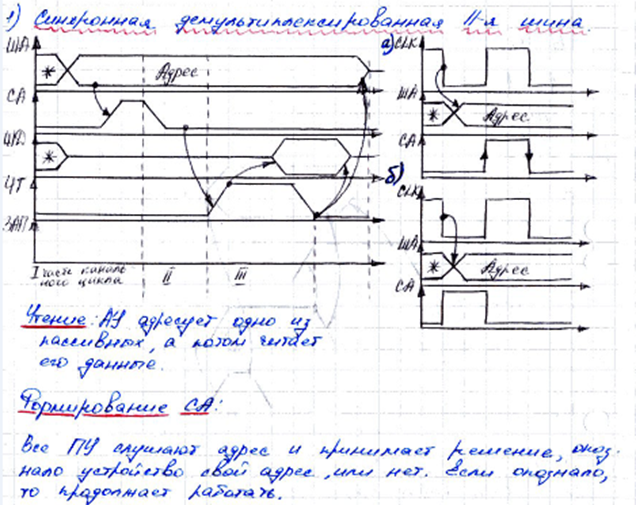
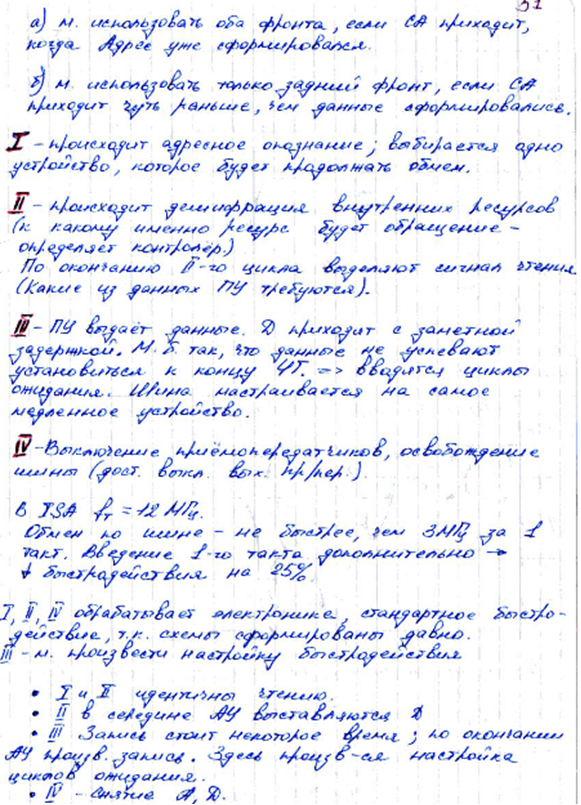
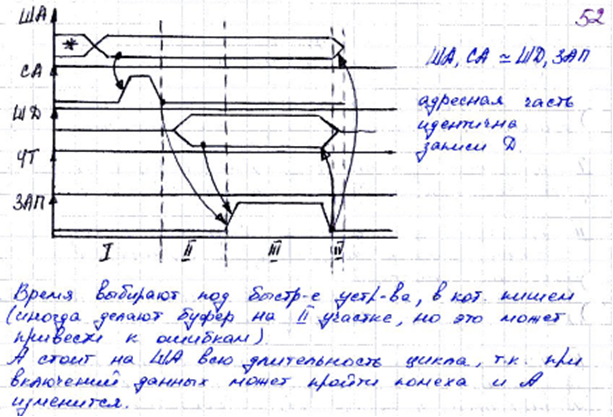
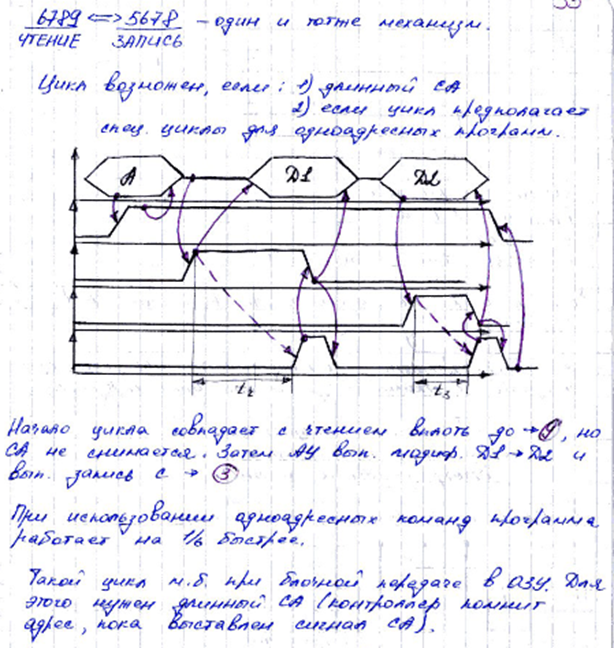
Основные циклы демультиплексированной параллельной шины.
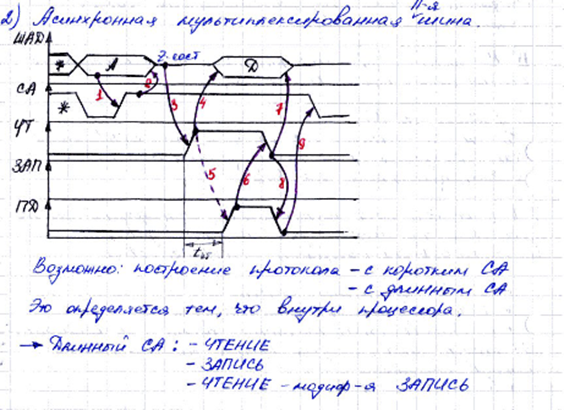
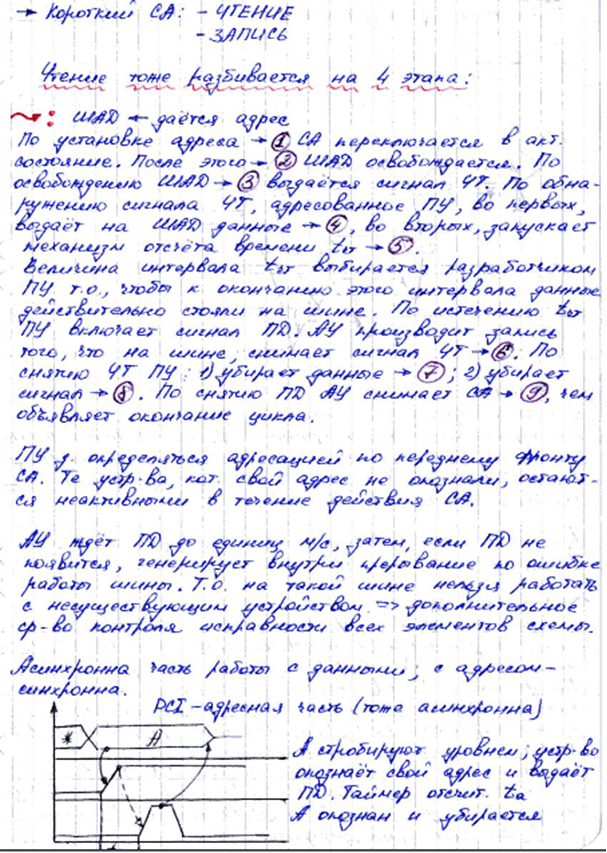
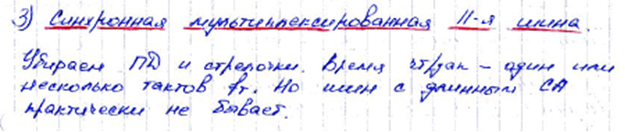
Основные циклы мультиплексированной параллельной шины.
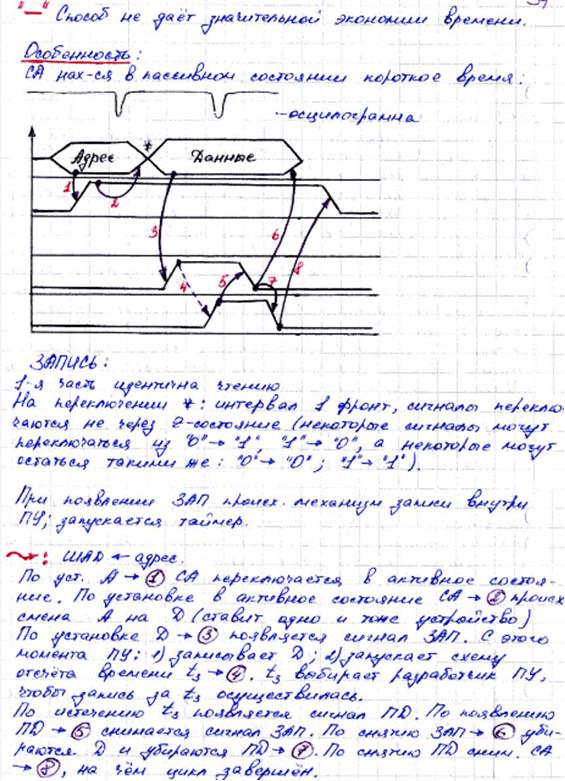
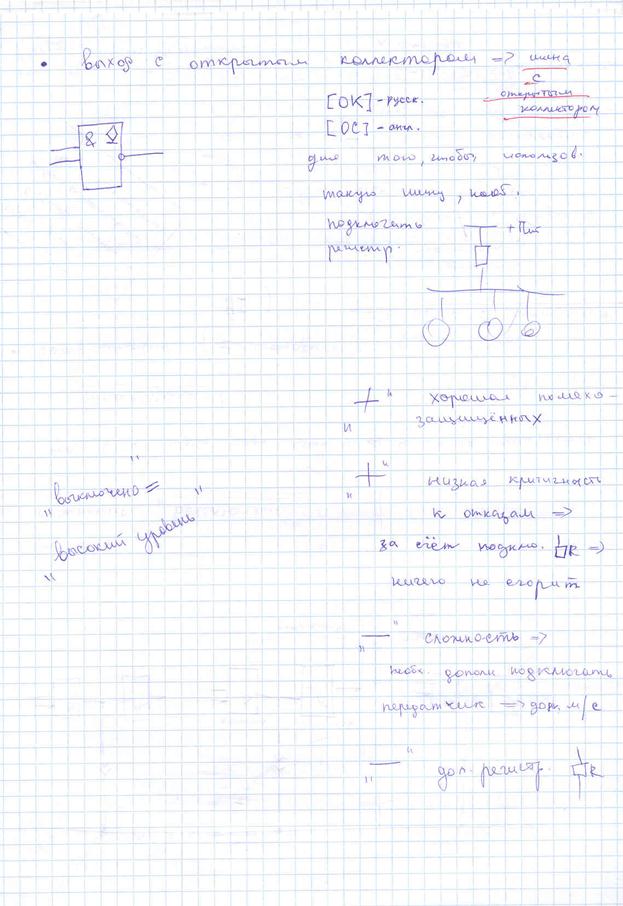
Способы аппаратной реализации двунаправленной шины: сравнение.
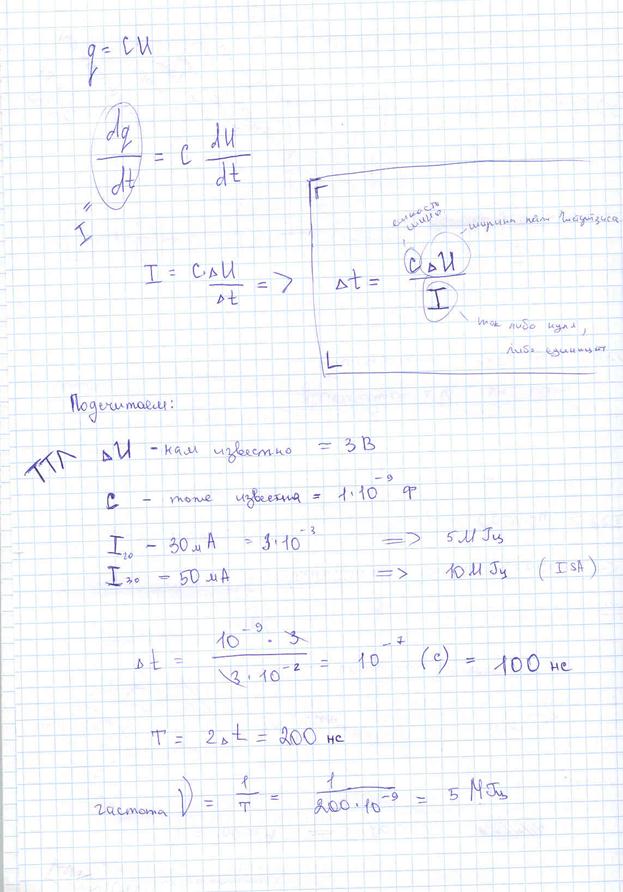
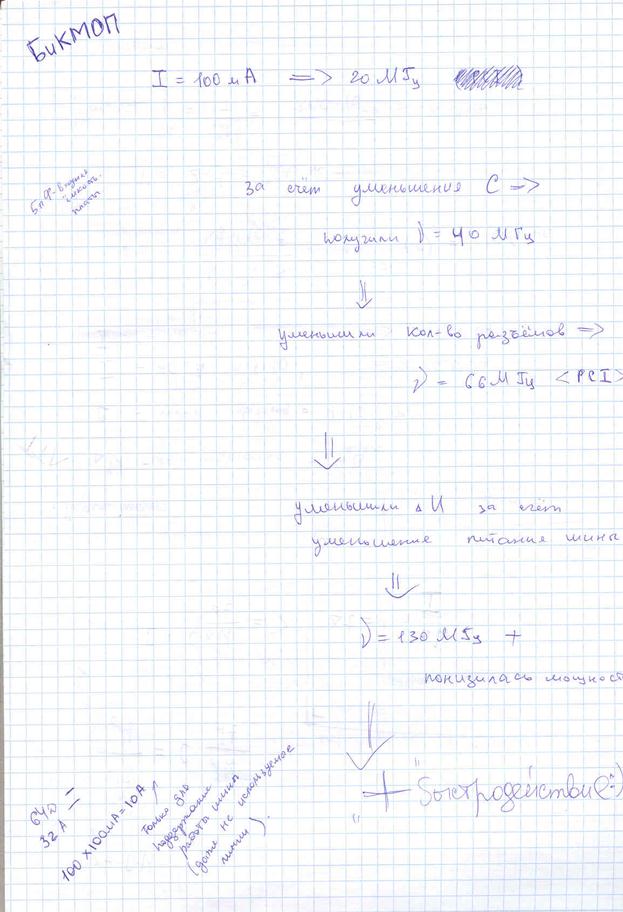
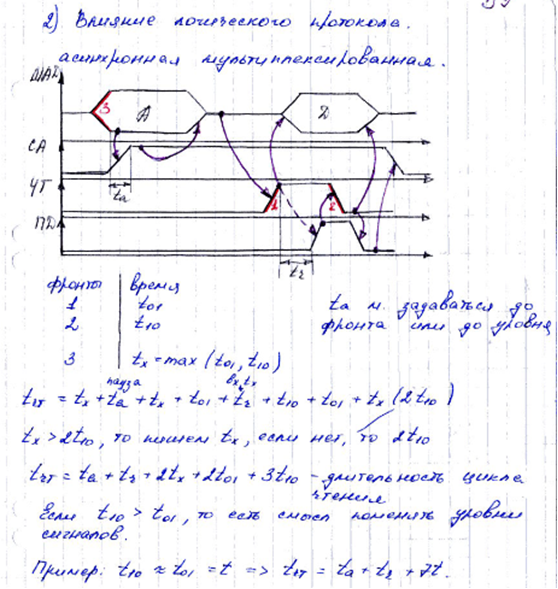
Влияние аппаратной и логической компонент шинного протокола на быстродействие шины.
Основные узлы интерфейсной части контроллера внешнего устройства (КВУ): краткая характеристика назначения каждого из узлов и взаимодействия с другими узлами.
Блок приема-передачи – все общение только через него, стандартизация шины МПУ, логики шины и самих сигналов.
ДВР – дешифратор внутренних регистров. Служит для формирования (получения основных разрядов адреса и сигнал для чтения). Выдает стробы чтения и записи для регистра.
Блок формирования сигнала потверждения
СБА - селектор базового адреса. При обращении к порту на линии системного интерфейса выставляется его адрес, который распознается специальным блоком – адресным декодером (или селектором адресов, что то же самое), – расположенным в устройстве, к которому приписан данный порт. Адресный декодер затем инициирует процесс обмена данными (запись или чтение, в зависимости от управляющих сигналов).
Типовые варианты схемотехники селектора базового адреса (СБА): схемные решения, методики анализа и синтеза.
Поскольку распознает базисные адреса то это выраженный дешифратор с n-входами и n-выходами. Строиться на базе логики есть ограничения должен обрабатывать цикл (до первого появления высокого уровня) :то критический уровень не более 2х элементов.
Типовая схема.
Методика анализа
Методика синтеза
Типовые варианты дешифратора внутренних регистров (ДВР): схемное решение, методика анализа и синтеза. Устройства фиктивного ввода/вывода.
Типовое схемное решение
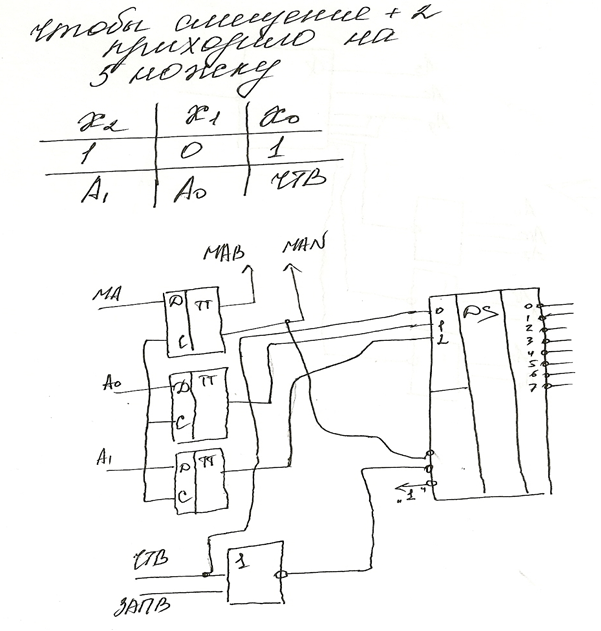
Сигнал MAN управляет чип селект разрешает его работу но нужно чтоб принял разрешение чтения или записи. Она может меняться.
На пример нужно получить чтение с сдвигом +2
Х2
Х1
Х0
чтв
А1
А0
Используется для упорядочения чисел.
К х0 приходит А0
К х1 приходит А1
К х2 приходит ЧТВ
В следствии на 6 будет нужный сигнал чтения со сдвигом +2
Методика синтеза
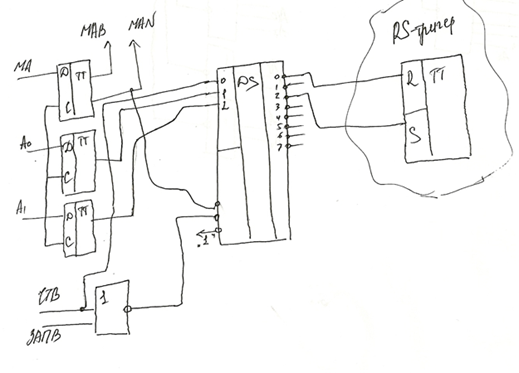
Устройство фиктивного ввода\вывода.
Х2
Х1
Х0
ЧТВ
А1
А2
Запись с нулевым сдвигом
Х2
Х2
Х0
ЧТВ
А1
А2
Запись по смещению +1
Без разницы какое число пропишем ,управляешь лишь то что получаем. Инфор-мация смысла не имеем.
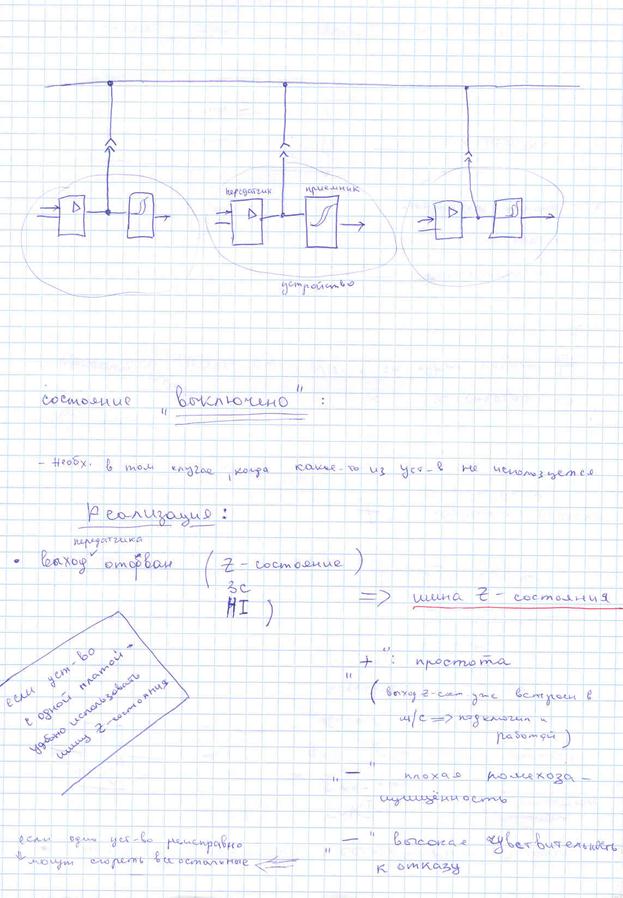
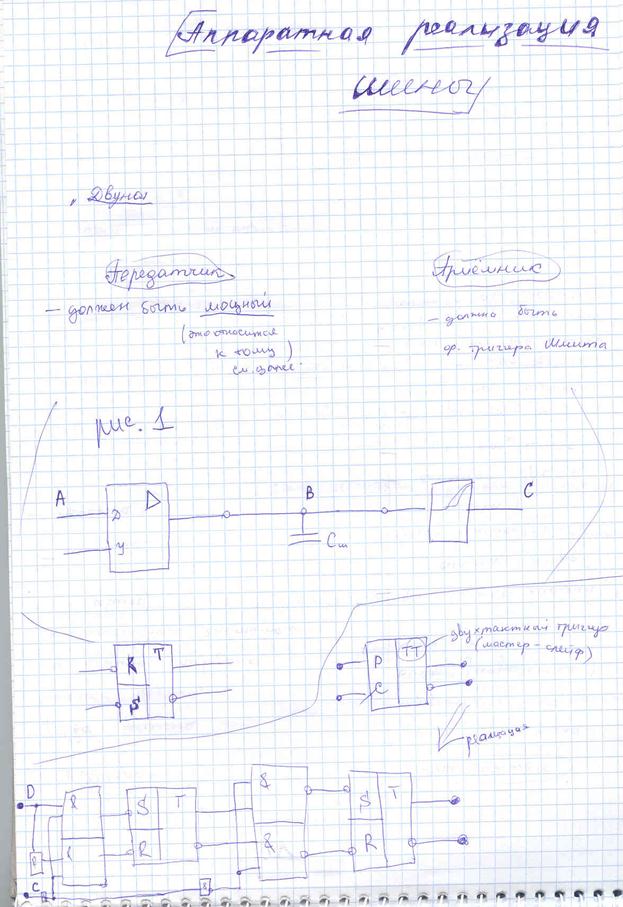
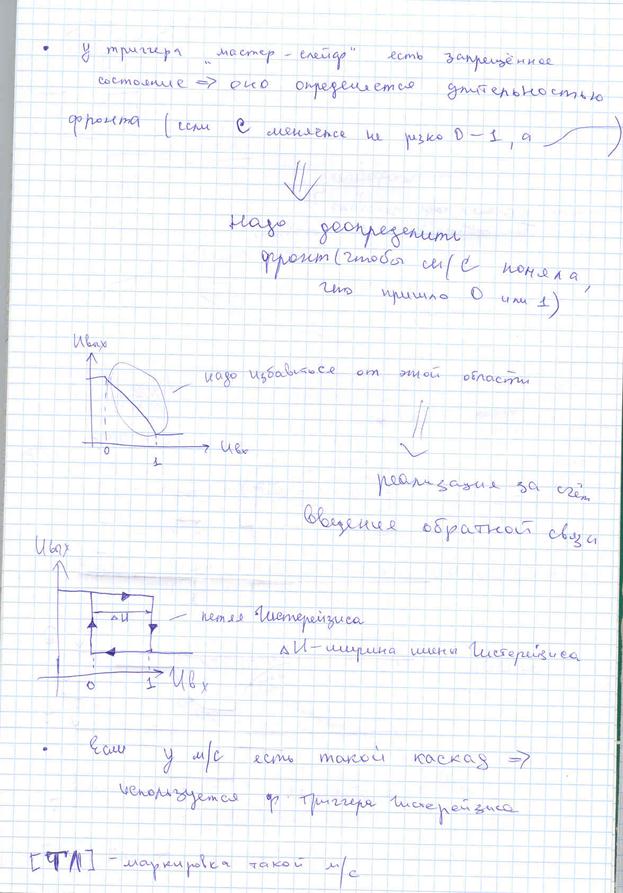
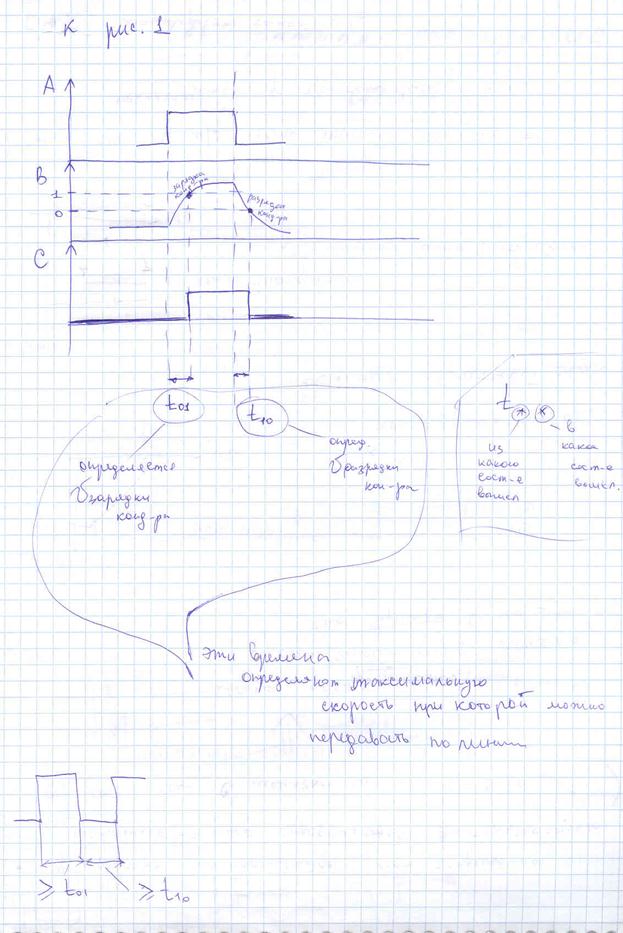
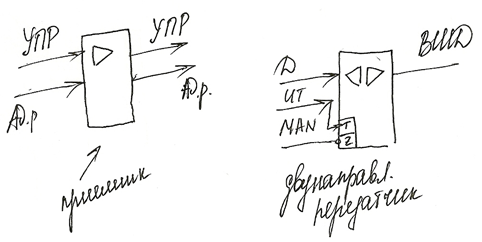
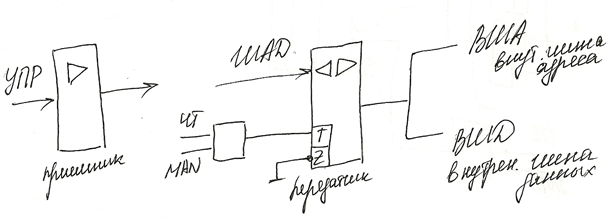
Блок приёмопередатчиков: назначение, варианты схемотехники и логики работы для различных типов шины.
1) Приемник
2) Передатчик – большой выходной ток
Демультиплексированные
Мультиплексированные
Z – включение моста
Антидребезговые алгоритмы: варианты алгоритмов с указанием особенностей настройки и применения.
Рис. 6.3. Схема клавиатуры на базе однокристальной микро-ЭВМ.
Программа МП для управления работой клавиатуры выполняет следующие функции: формирует
последовательность кодовых комбинаций для опроса Х (столбцов); анализирует входные комбинации
сигналов У (строк) клавиатуры; проверяет правильность полученных комбинаций; формирует код
символа в соответствии с кодовыми таблицами используемого в ЭВМ внутреннего кода; передает
сформированный код символа в ЭВМ.
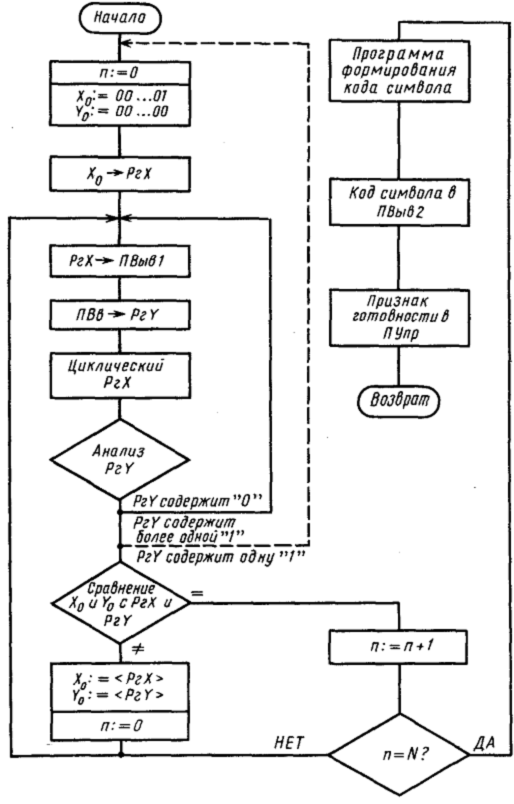
Вначале программа МП (рис.6.4) устанавливает исходное состояние счетчика повторений n:= 0 и
начальные коды столбца Хо:= 00...01 и строки Уо: = 00...00. Каждое следующее значение кода Х
формируется путем циклического сдвига Хо на один разряд. Значение Х передается в Пвыв1, к
выходам которого подсоединены вертикальные шины матрицы ключей клавиатуры. На
горизонтальных шинах матрицы, подключенных к входам Пвв, формируется одна из комбинаций
сигналов, программно считываемая МП. Эта комбинация содержит:
— все нули, если ни одна из клавишей не нажата или нажатая клавиша не находится в
вертикальном ряду, на который от Пвыв1 подается сигнал «1»; программа производит очередной
сдвиг кода X, т.е. продолжает поиск нажатой клавиши;
— несколько единиц, если нажато две клавиши в вертикальном столбце, соответствующем
сигналу «1» из Пвыв1, эта ситуация является ошибочной и МП может включать звуковой сигнал;
программа МП реализует возврат к началу;
— одну единицу, если нажата одна клавиша вертикального ряда, которому соответствует сигнал
«1» на выходе Пвыв1. По текущему значению кода опроса столбца Х и принятому из Пвв значению
кода строки У программно формируется весовой код нажатой клавиши, т.е. замкнутого ключа. Для
этого вначале коды опроса столбца Х и строки Y преобразуются к двоичному или двоично-
десятичному виду Xст и Yст с помощью программных счетчиков. Затем определяется весовое.
значение К нажатой клавиши
К = рХст+Уст,
где р — число ключей в одной строке матрицы клавиатуры.
Значение К запоминается и цикл опроса клавиатуры повторяется. При каждом последующем
цикле опроса клавиатуры производится сравнение текущего значения Ki и предшествующего K,i-1.
При их совпадении увеличивается на единицу содержимое счетчика повторений, а при несовпадении
счетчик повторений сбрасывается в нуль и в качестве весового значения нажатой клавиши
принимается текущее значение К:. Если в течение n=N циклов весовое значение нажатой клавиши К
не менялось, то оно используется для формирования стандартного кода символа.
Базовый алгоритм:
Нельзя использовать.
Буферной памяти нет в компьютере.
Есть буфер. Крутится до нажатия кнопки RESET. Если устройство без буфера, то алгоритм не катит.
1) Алгоритм задержки
Y=KEY()
If Y=KEY()=FF – не нажато
Else
Нажата какая-то клавиша
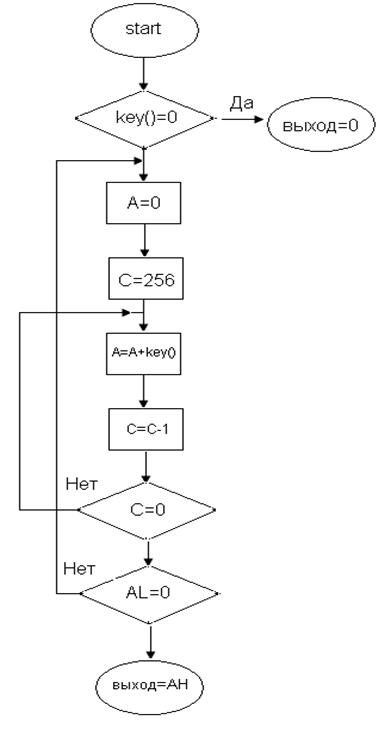
2) Алгоритм суммирования
Key()=0 – все клавиши отпущены, если не =0, значит какая-то клавиша нажата.
3) Скользящий алгоритм
Рис. 6.4. Алгоритм функционирования электронной клавиатуры.
Этим достигается «задержка» на время переходного процесса в ключе, т.е. исключаются ошибки
из-за дребезга контактов. Таким же образом выявляется случай одновременного нажатия клавиш,
находящихся в разных столбцах. Код символа может формироваться посредством таблицы, хранимой
в ПЗУ. В этом случае весовое значение клавиши используется в качестве смещения или базового
адреса ячейки ПЗУ с искомым значением кода. Весовые значения клавишей переключения регистров
клавиатуры используются в качестве базового адреса, а остальных клавишей — в качестве смещения.
В более простых случаях код символа формируется программно, например, код нажатой клавиши
определяет младшие разряды кода символа, а номер регистра клавиатуры — старшие разряды.
Клавиатурные алгоритмы: варианты алгоритмов с указанием особенностей и применения.
Клавиатурные алгоритмы: варианты алгоритмов с указанием особенностей и применения.
Клавиатурные алгоритмы
При работе с клавиатурами программисту приходится решать еще одну проблему: когда должна выполняться функция, связанная с данной клавишей - в момент нажатия клавиши (т.е. в момент обнаружения программой факта нажатия) или в момент отпускания клавиши. На первый взгляд более приемлемым является первое предложение. Но при этом программист принять меры, чтобы застраховаться от повторного (ложного) срабатывания данной функции, если пользователь не успел отпустить клавишу за то время, пока выполнялась функция. Кроме того, реализация клавиатур с функциональными клавишами (т.е. клавиша "А" выполняет действие "а", клавиша "Б" выполняет действие "б", и действие "в", если нажаты одновременно обе клавиши) заметно усложняет алгоритм антидре-безговой программы.
Для прояснения ситуации целесообразно разделить алгоритмы, работающие с клавиатурой и представляющие следующий вверх уровень иерархии алгоритмов на алгоритмы, работающие по нажатию (т.е. запускающие функцию в момент обнару-жения программой факта нажатия клавиши) и алгоритмы, работающие по отпусканию (т.е. запускающие функцию в момент обнаружения программой факта отпускания клавиши или клавиш). Последние, в свою очередь, можно разделить на одноклавишные и многоклавишные. Алгоритм, работающий по нажатию, многоклавишным не может быть принципиально, ибо в этом случае придется допустить, что алгоритм обладает априорной информацией: будет нажата еще одна клавиша или пользователь ограничится уже нажатой.
Одноклавишные алгоритмы, в свою очередь, подразделяются на алгоритмы, воз-вращающие код первой нажатой клавиши (нажатия на последующие клавиши счита-ются ложными) и алгоритмы, возвращающие код последней нажатой клавиши (нажа-тия на предыдущие клавиши считаются ложными). Каждый из этих алгоритмов имеет свою область применения.
Рассмотрим некоторые из них. Все эти алгоритмы используют в качестве нижнего уровня иерархии антидребезговые алгоритмы, рассмотренные ранее. Поэтому в дальнейшем обозначим на блок-схеме применяемый антидребезговый алгоритм подпрограммой АДА, возвращающей результат в переменной А.
1.2.1 Одноклавишный алгоритм, работающий по нажатию
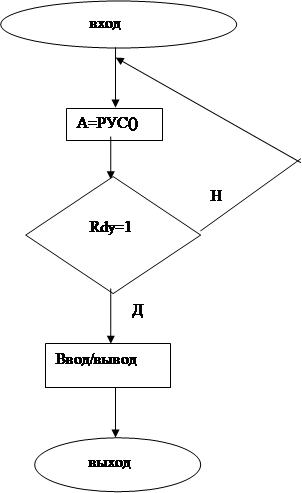
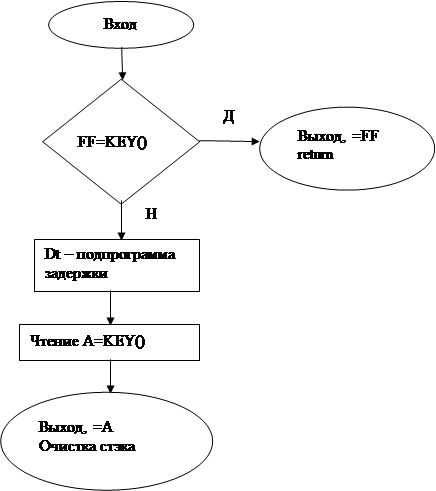
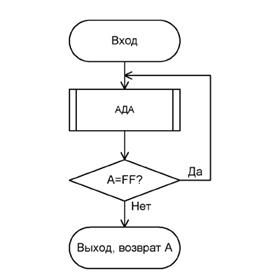
Самым простым из одноклавишных алгоритмов является алгоритм, работающий по нажатию. Блок-схема этого алгоритма показана на рисунке 4.
А=FF?
Выход, возврат А
Рисунок4. Блок-схема одноклавишного алгоритма, работающего по нажатию
Фактически он сводится к ожиданию обнаружения момента нажатия клавиши и возврата ее кода. Следует обратить внимание на тот факт, что алгоритм не преду-сматривает выхода по отсутствию нажатия клавиши в момент своей активизации - для подобного алгоритма такая точка выхода противоречила бы самой логике алго-ритма.
В дальнейших пояснениях алгоритм не нуждается.
1.2.2 Одноклавишные алгоритмы, работающие по отпусканию
Подобные алгоритмы могут быть подразделены по тому, код какой из клавиш они возвращают. Возможны два варианта: алгоритм, возвращающий код первой нажатой клавиши (все остальные нажатые клавиши считаются ошибочными и игнорируются) и алгоритм, возвращающий код последней отпущенной клавиши (предполагается, что пользователь мог ошибиться и исправить ошибку).
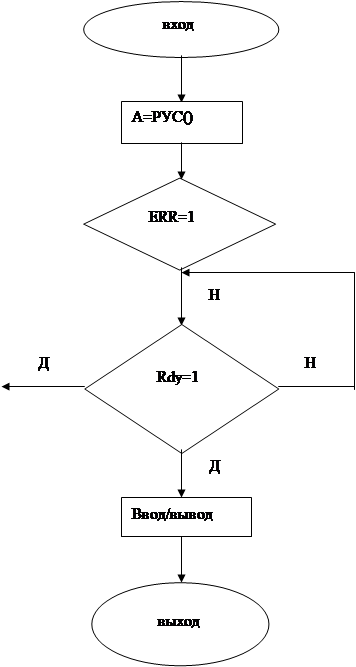
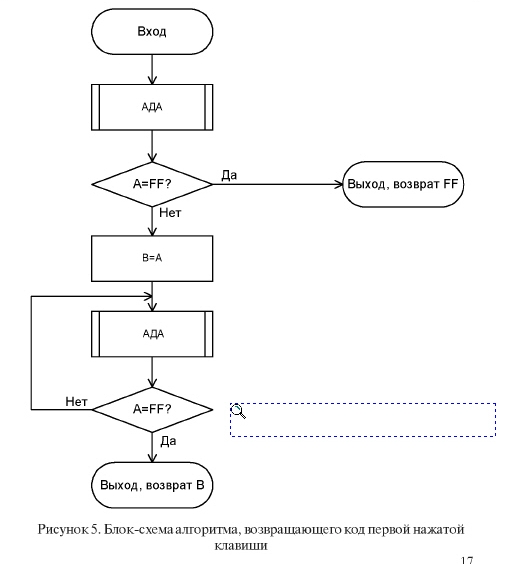
Блок-схема алгоритма, возвращающего код первой нажатой клавиши показана на рисунке 5.
Работает алгоритм следующим образом.
После первого вызова антидребезгового алгоритма проводится анализ: нажата ли хотя бы одна клавиша?
Если нажатых клавиш не обнаружено, то дальнейшая работа утрачивает смысл и осуществляется выход из алгоритма с кодом возврата, свидетельствующим об отсут-ствии нажатых клавиш.
Если же хотя бы одна из клавиш нажата, то результат работы антидребезгового алгоритма запоминается в переменной В.
После этого вновь запускается цикл, состоящий из вызова антидребезгового алго-ритма и проверки на отсутствие нажатых клавиш. Цикл повторяется до тех пор, пока не будет обнаружен факт отпускания всех клавиш.
Код первой нажатой клавиши, сохраненный в переменной В, используется в каче-стве кода возврата при выходе из алгоритма.
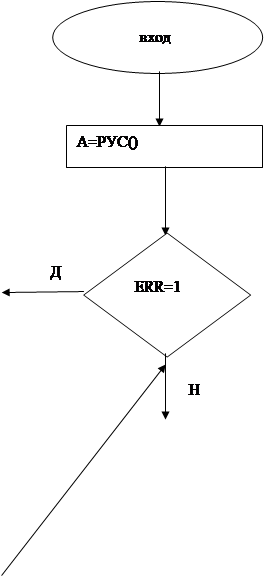
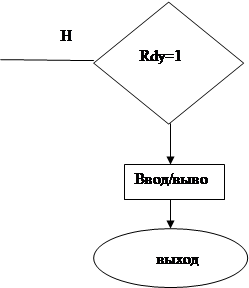
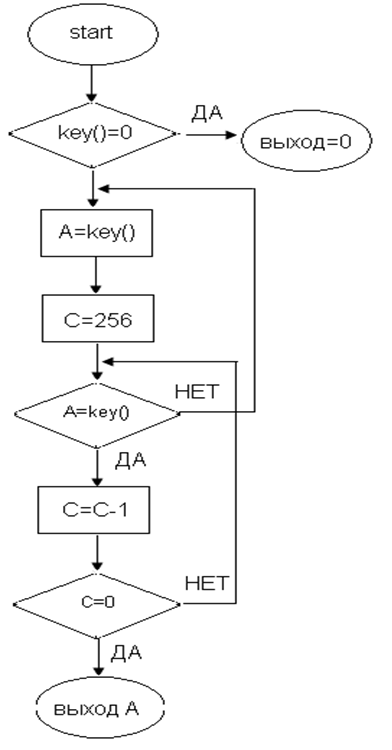
Блок-схема алгоритма, возвращающего код последней отпущенной клавиши пока-зана на рисунке 6.
Работает алгоритм следующим образом.
После первого вызова антидребезгового алгоритма проводится анализ: нажата ли хотя бы одна клавиша?
Если нажатых клавиш не обнаружено, то дальнейшая работа утрачивает смысл и осуществляется выход из алгоритма с кодом возврата, свидетельствующим об отсут-ствии нажатых клавиш.
Если же хотя бы одна из клавиш нажата, то результат работы антидребезгового алгоритма запоминается в переменной В.
После этого вновь запускается цикл, состоящий из вызова антидребезгового алго-ритма и проверки на отсутствие нажатых клавиш.
В случае, если все клавиши отпущены, алгоритм возвращает значение, сохранен-ное в переменной В.
В случае, если не все клавиши отпущены (код возврата антидребезгового алго-ритма не равен FF), проводится дополнительный анализ: совпадает ли код возврата антидребезгового алгоритма с кодом, сохраненным в переменной В? В случае сов-падения алгоритм работает аналогично описанному выше, продолжая ожидать мо-мента отпускания всех клавиш. Если же код, сохраненный в переменной В не совпал с кодом возврата антидребезгового алгоритма, то в переменной В сохраняется новое значение и алгоритм продолжает ожидать момент отпускания всех клавиш.
1.2.3 Многоклавишные алгоритмы
Многоклавишные алгоритмы способны работать в ситуации, когда головным алго-ритмом программы используются комбинации из нескольких одновременно нажатых клавиш. Обычно такой алгоритм имеет несколько точек выхода: по неактивной кла-виатуре, по одной нажатой клавише, по двум нажатым клавишам, по N нажатым кла-вишам.
В принципе, все эти точки выхода можно объединить в одну, однако такое дей-ствие, скорее всего, плохо впишется в головной алгоритм программы, поскольку оди-ночное нажатие и многоклавишные комбинации обрабатывают, обычно, суще-ственно различающиеся по функции блоки головного алгоритма программы.
Чаще всего программист направляет выходы по многоклавишным комбинациям в соответствующие места головного алгоритма, что позволяет существенно его упро-стить.
Конкретное N - максимальное количество одновременно нажатых клавиш закла-дывается в алгоритм на этапе его разработки. В случае, если оператор нажмет большее, чем N клавиш одновременно, то все клавиши, нажатые после N-ой, будут проигнорированы.
Такое свойство алгоритма основано на том, что оператор не может одновременно (с точки зрения быстродействия алгоритма) нажать или отпустить несколько клавиш. В этом случае нажатия и отпускания будут происходить последовательно и задача алгоритма - просто отсчитать первые N нажатий.
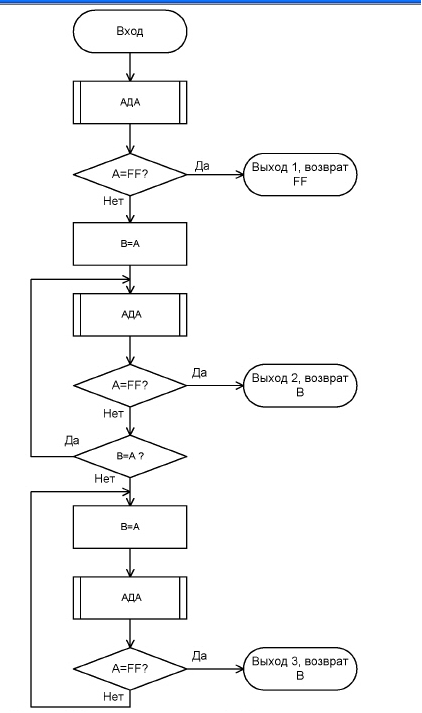
Блок схема алгоритма, обрабатывающего двухклавишные нажатия, показан на рисунке 7.
Этот алгоритм очень напоминает алгоритм, возвращающий код последней отпу-щенной клавиши (см. рис 6), однако после сравнения (А=В?), если код, сохраненный в переменной В не совпал с кодом возврата антидребезгового алгоритма, то данный алгоритм не возвращается назад, а сохраняет новое значение А в отдельном эле-менте на продолжении алгоритма.
Эта особенность позволяет разделить алгоритм на две части: часть, в которой зафиксировано одноклавишное нажатие и ожидается отпускание клавиши или нажатие следующей, и часть, в которой зафиксировано двухклавишное нажатие и ожидается только отпускание клавиш.
Алгоритм имеет три точки выхода: выход 1 - по отсутствию нажатых клавиш, вы-ход 2 - по одноклавишному и 3 - по двух-клавишному нажатию.
На этой базе можно построить и алгоритм, способный различать одно- двух- и трехклавишные нажатия. Блок-схема этого алгоритма показана на рисунке 8.
Алгоритм может быть получен из предыдущего обведенного дублированием участка. Точно так же из трехклавишного может быть построен и алгоритм на боль-шее число клавиш -достаточно только нужное число раз продублировать обведенный участок алгоритма.
Алгоритм имеет четыре точки выхода: выход 1 - по отсутствию нажатых клавиш, выход 2 - по одноклавишному нажатию, выход 3 - по двухклавишному нажатию и вы-ход 4 - по трехкла-вишному нажатию.
Алгоритмы быстрого доступа к данным: варианты алгоритмов с указанием особенностей применения.