Группа функций freqs в общем выполняет расчет частотной характеристики по передаточной функции аналогового фильтра (преобразованию Лапласа импульсной характеристики), заданной векторами числителя и знаменателя:
(2)
Функция h=freqs(b,a,w)вычисляет значения частотной характеристики аналогового фильтра по отсчетам частоты, выраженным в радианах в секунду, которые задаются в векторе w.
Функция [h,w]=freqs(b,a) автоматически выбирает 200 частотных отсчетов, для которых вычисляется частотная характеристика. Число отсчетов может быть задано параметром n. В этом случае используется функция[h,w]=freqs(b,a,n).
Выполним вычисление и вывод частотной характеристики с передаточной функцией
Программа расчета может быть построена следующим образом:
%a_filtr2
a=[1 0.4 1];
b=[0.2 0.3 1];
w=logspace(-1,1);
freqs(b,a,w)
Результаты вычислений приведены на рис 2.
рис 2.
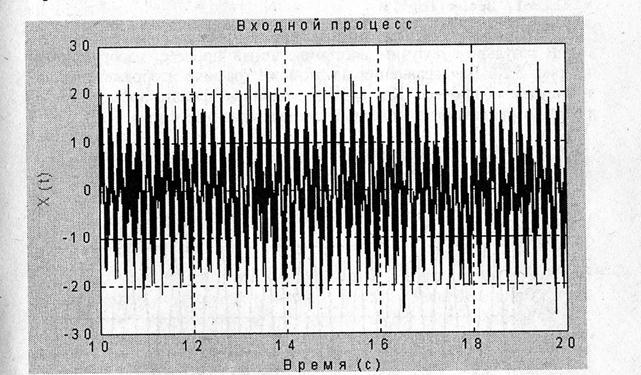
Входной процесс x(t) может быть представлен совокупностью дискретных отсчетов выбранных в моменты времени с одинаковым шагом (дискретом) Ts. Время принимает только дискретные значения t= k Ts. В этом случае входной процесс может быть представлен вектором значений x(k), где k –номер измерения с начала процесса. (t= k Ts).
В этом случае исходное дифференциальное уравнение может быть выражено через конечные разности переменных х и у. Конечно разностным эквивалентом производной является величина:
,
а второй производной , отношение
При этом дискретным аналогом дифференциального уравнения (1) будет разностное уравнение:
Применяя к полученному уравнению Z-преобразование, получим:
, (4)
где:
(5)
Дискретная передаточная функция фильтра определяется из уравнения (4):
(6)
Таким образом цифровым аналогом колебательного звена является цифровой фильтр с коэффициентами числителя и знаменателя, рассчитанными по формулам (4) и (5).
Чтобы получить частотную характеристику по дискретной передаточной, функции , заданной векторами значений ее числителя и знаменателя , используется процедура freqz, аналогичная freqs.
Фильтрация сигнала в пакете MATLAB с помощь линейного фильтра, описываемого передаточной функцией вида:
(7)
осуществляется процедурой filter следующим образом:
y=filter (b,a,x)
где х – заданный вектор значений входного сигнала; у- вектор значений выходного сигнала фильтра после процедуры фильтрации; b-вектор коэффициентов числителя дискретной передаточной функции (7) линейного фильтра; а-вектор коэффициентов знаменателя передаточной функции.
Рассмотрим пример задачи фильтрации. Пусть имеется сигнал синусоидальной формы с периодом Т1=1 (с) и амплитудой А1=0.75. Сформируем этот сигнал в виде вектора с периодом Т1=1 и амплитудой А1=0.75. Вектор значений сигнала определен в дискретные моменты времени с шагом Ts=0.001:
Пусть в процессе обработки сигнала (первичным преобразователем) к полезному сигналу добавился шум, представляющий собой высокочастотную синусоиду с периодом и амплитудой , а в процессе измерения – гауссовый шум измерителя с интенсивностью . Измеренный сигнал после измерения будет иметь вил:
График сигнала после измерения приобретет вид:
Рис 3.
Задачей обработки измерений является возможно более полное восстановление полезного сигнала на фоне аддитивных добавок помех и шумов. Поскольку частота полезного сигнала известна, задача может быть решена посредством линейной фильтрации. Вследствие монохроматичности полезного сигнала в качестве линейного фильтра можно применить резонансный фильтр. Резонансная частота такого фильтра должна быть обратно пропорциональна периоду колебаний полезного сигнала, а для восстановления амплитуды полезного сигнала амплитуда входного сигнала фильтра домножается на постоянную величину , поскольку при резонансе изменение амплитуды сигнала по сравнению с входным сигналом пропорционально этой же величине. Программа фильтра имеет вид
В результате получим восстановленный процесс, рис 4. Для сравнения на рис 4 показан исходный сигнал. Созданный фильтр достаточно хорошо восстанавливает полезный сигнал.
Рис.4
Более точному восстановлению препятствуют 2 обстоятельства:
1. восстановленный процесс устанавливается с запозданием вследствие нулевых начальных условий самого фильтра, как динамического звена, рис 5.
рис 5.
2. в установившемся режиме наблюдается значительный сдвиг фаз, между входным и восстанавливаемым процессами, т.к при резонансе сдвиг фаз достигает именно такой величины.
Для исключения фазовых искажений можно воспользоваться процедурой filtfilt.Процедура filtfilt осуществляет обработку входного вектора в два приема: сначала в прямом, а затем в обратном направлении.


 по передаточной функции
по передаточной функции  аналогового фильтра (преобразованию Лапласа импульсной характеристики), заданной векторами
аналогового фильтра (преобразованию Лапласа импульсной характеристики), заданной векторами  числителя и
числителя и  знаменателя:
знаменателя: (2)
(2)

 является величина:
является величина: ,
, , отношение
, отношение

 , (4)
, (4)
 (5)
(5)

 (6)
(6)
 по дискретной передаточной, функции
по дискретной передаточной, функции  , заданной векторами значений ее
, заданной векторами значений ее  (7)
(7)
 и амплитудой
и амплитудой  , а в процессе измерения – гауссовый шум измерителя с интенсивностью
, а в процессе измерения – гауссовый шум измерителя с интенсивностью  . Измеренный сигнал после измерения будет иметь вил:
. Измеренный сигнал после измерения будет иметь вил:
 , поскольку при резонансе изменение амплитуды сигнала по сравнению с входным сигналом пропорционально этой же величине. Программа фильтра имеет вид
, поскольку при резонансе изменение амплитуды сигнала по сравнению с входным сигналом пропорционально этой же величине. Программа фильтра имеет вид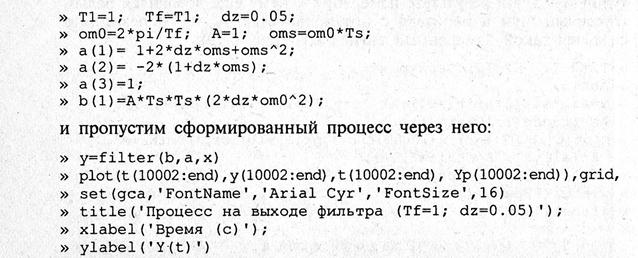


 между входным и восстанавливаемым процессами, т.к при резонансе сдвиг фаз достигает именно такой величины.
между входным и восстанавливаемым процессами, т.к при резонансе сдвиг фаз достигает именно такой величины. в два приема: сначала в прямом, а затем в обратном направлении.
в два приема: сначала в прямом, а затем в обратном направлении.