Компрессия или сжатие данных применяется для сокращения времени их передачи. Наличие в сообщениях избыточности позволяет ставить вопрос о сжатии данных, т е передачи того же количества информации с помощью последовательности символом меньшей длины. Сжатие осуществляется либо на прикладном уровне (статическая компрессия), либо с помощью устройств защиты от ошибок в составе каких-либо протоколов (динамическая компрессия). Компрессия данных требует довольно больших вычислительных затрат и временных затрат, поэтому наиболее перспективно применения компрессии данных в низкоскоростных линиях связи. Алгоритмы компрессии соответствуют определенным типам данных.
1) Десятичная упаковка.
2) Относительное кодирование.
3) Символьное подавление. Часто передаваемые данные содержат большое количество повторяющихся байтов, следовательно, можно было бы передавать значение этого байта, количество повторения и адрес начала последовательности.
4) Коды переменной длины. Не все символы в сообщении встречаются с одинаковой частотой, следовательно коды часто встречающихся символов лучше всего заменить кодами меньшей длины.
Графические и текстовые данные сжимаются очень хорошо, а код программы, плохо
Электропривод - это управляемая электромеханическая система обязательно содержащая
электромеханический преобразователь.
Назначение электропривода - преобразовать электрическую энергию в механическую и управлять
этим процессом.
Электропривод имеет два канала:
· силовой
· информационный
По силовому преобразуется электрическая энергия в механическую, а информационный канал осуществляет сбор сведений о состоянии объектов электрического привода и в случае необходимости по информационному каналу передаются управляющие характера воздействия на объект электропривода.
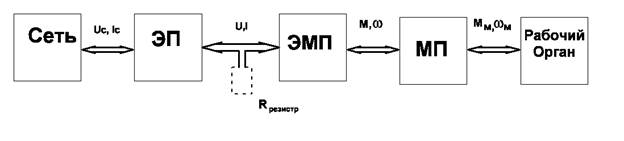
Структурная схема электропривода.
Силовой канал состоит из двух частей:
1. Электрическая часть:
- электрическое питание
- электрический преобразователь (при необходимости)
- стационарная (неподвижная) часть электромеханического преобразователя
2. Механическая часть:
- подвижный элемент электромеханического преобразователя
- механический преобразователь
Механический преобразователь представляет собой либо редуктор, либо пару винт-гайка, либо кривошипно-шатунный механизм, либо ряд других сочетаний связанных с рабочим органом технологической установки.
ИП - информационный преобразователь предназначен для осуществления взаимосвязи привода с
системой электроснабжения, с системой технологической установкой или машиной и с информационной системой более высокого уровня.
Состав и функции электропривода.
Состав и функции электропривода.
1. Силовой энергетический канал.
Осуществляет передачу энергии сети рабочей машины , преобразуя её соответствующим образом на отдельных этапах преобразования.
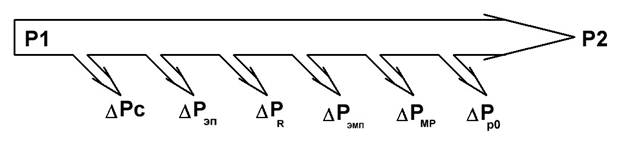
Передача мощности от сети P1 к рабочему органу P2 осуществляется в силовом канале, где неизбежны потери мощности ΔP в каждом элементе этого канала.
Функция электромеханического преобразователя(ЭП), если он используется, состоит в преобразовании электрической энергии поставляемой сетью с параметрами Uc, Ic в электрическую энергию требуемую для ЭМП и характеризующиеся параметрами U и I.
Преобразователи бывают:
· Неуправляемые (трансформатор, выпрямитель и т.д.)
Они могут иметь одностороннюю и двухстороннюю проводимость.
Односторонняя- выпрямитель с трансформатором.
Двухсторонняя- мотор-генератор, управляемый выпрямитель с двумя комплектами тиристоров.
При односторонней проводимости преобразователя и обратном потоке энергии от ЭМП используется дополнительный резистор R(см. рис. 2) для «слива»(удаления) возвращаемой энергии, которая во всех случаях переводится в тепло в данном резисторе.
ЭМП преобразует энергию с параметрами U, I в механическую, с параметрами M, ω и обратно.
МП(механический преобразователь)- редуктор, система блоков, кривошипно-шатунный механизм, винт-гайка и т.д.
Осуществляет согласование момента M и рабочего органа технологической установки.
Величины характеризующие преобразуемую энергию, а именно напряжение, ток, моменты, силы, скорости, называют координатами электропривода.
Основная функция электропривода состоит в управлении координатами, т.е. в их принудительном направленном изменении в соответствии с требованиями обслуживаемого технологического процесса.
Управление координатами должно осуществляться в пределах, разрешённых конструкций элементов электропривода. Этим обеспечивается надёжность системы . Допустимые пределы обычно связаны с начальными значениями координат определёнными производителями используемого оборудования.
В правильно организованной системе управление координатами привода должно минимизировать потери ΔP во всех элементах электропривода и к рабочему органу у рабочему органу должна подводится требуемая в данный момент мощность.
Таким образом, электропривод- система состоящая из электромеханического преобразователя и управляющей (информационной) части осуществляющей управление преобразуемой электрической энергией в механическую и обратно, взаимодействующая с системой электроснабжения рабочей машины и системой управления более высокого уровня.


 рабочего органа технологической установки.
рабочего органа технологической установки.