1.1 Развитие предмета и метода экономической теории
Микроэкономика является неотъемлемой частью общей экономической теории, ее первым этапом познания. Для понимания предмета и метода микроэкономики необходимо проследить эволюцию данных понятий в рамках развития экономической теории.
Процесс формирования и развития экономической науки осуществлялся поэтапно. Впервые ее предмет был определен английским экономистом Адамом Смитом как изучение природы и причин богатства общества. Богатство определялось как результат производительного труда основных классов общества, взаимодействие которых гармонично при условии, что оно осуществляется посредством рыночного обмена. Свободный рынок наилучшим образом обеспечивает согласование интересов граждан и достижение как индивидуального, так и общественного благосостояния. Преследующий собственные цели индивид, направляется «невидимой рукой рынка» и «часто более действенным образом служит интересам общества, чем тогда, когда сознательно стремиться служить им».[1]Научная система, разработанная А.Смитом, вошла в историю экономической мысли под названием классической политической экономии.
Во второй половине ХIХ века все ощутимее становится ограниченность экономических ресурсов, вместе с тем все разнообразнее выглядят человеческие потребности. Перед экономистами встает задача оптимизации поведения экономических субъектов, в том числе отдельных фирм для реализации экономических целей. Меняется предмет исследования, его методы, а также название самой науки. Понятие «политическая экономия» замещается понятием «экономика». Теоретическим основанием новой науки стал неоклассический анализ, построенный на использовании методов предельных величин, дифференциальных и интегральных вычислений. Главным предметом анализа выступала уже не теория трудовой стоимости, а теория цены. Основоположник неоклассического анализа Альфред Маршалл рассматривал механизм ценообразования как рыночный процесс уравновешивания спроса и предложения. Теория цены затем была переименована в теорию фирмы и, наконец, получила широко используемое сегодня название -«микроэкномика».
В определении Маршалла «экономическая наука занимается исследованием нормальной жизнедеятельности человеческого общества; она изучает ту сферу индивидуальных и общественных действий, которая теснейшим образом связана с созданием и использованием материальных основ благосостояния».[2] Однако и это определение предмета не было окончательным. По мнению многих экономистов, оно было излишне «материалистично» и не учитывало самого процесса принятия решений субъектами. В современных учебных курсах предмет экономической теории с позиций неоклассиков дается в определении Л.Роббинса: «Экономическая наука- это наука, изучающая человеческое поведение с точки зрения соотношения между целями и ограниченными средствами, которые могут иметь различное употребление».
Идеализация механизма свободной конкуренции, недооценка роли государства, характерные для неоклассиков, недостаточно объективно отражали экономическую действительность того времени. В частности механизм рыночного равновесия оказался не способен обеспечить стабильность большинства экономик в условиях мирового кризиса. Это предопределило появление нового направления экономической теории- макроэкономического анализа. Создатель данного направления Джон Мейнард Кейнс по новому сформулировал предмет и методы экономических исследований. Объектами экономической науки были определены совокупный (эффективный) спрос всех участников экономической системы, включая спрос потребителей, инвесторов, государства. Методология анализа строилась на использовании методов агрегирования и прогнозирования.
Как показал Кейнс, рынок оказывается не в состоянии обеспечить «эффективный спрос», поэтому стимулировать его должно государство методами кредитно-денежной и бюджетной политики. Предлагаемая им политика активизации государственных инвестиций и снижения ставки банковского процента создавали перманентный дефицит государственного бюджета. Неизбежность разрастания инфляции в рамках стабилизационной политики определили постепенный уход от кейнсианских принципов, возврат к неоклассическому регулированию в его современных вариантах.
Таким образом, к середине ХХ века, сформировались два основных раздела экономической теории, рассматриваемые в современных учебных курсах: микроэкономика и макроэкономика. Микроэкономика построена на изучении поведения отдельных экономических агентов (домохозяйств и фирм), направленного на максимизацию полезности. Макроэкономика исследует результаты совместной экономической деятельности всех участников народного хозяйства: домохозяйств, фирм, государства и заграничных агентов. Эти результаты обычно выражаются системой макроэкономических показателей, в том числе национальным доходом, уровнем безработицы, темпами инфляции, динамикой экономического роста, состоянием государственного бюджета и платежного баланса.
Основоположник макроэкономического анализа, Д.М.Кейнс неоднократно отмечал, что экономика это скорее метод, чем учение, техника мышления, инструмент разума. Методэкономической теории, как и предмет данной науки, включает различные структурные элементы. Главными из них являются: 1) философские и общенаучные методы познания; 2) законы диалектики; 3) категории философии; 4) законы и категории экономической теории; 5) рациональные средства и методы прикладного экономического анализа, которые широко используют западные ученые.Основным методом исследования, используемым в микроэкономике, является моделирование экономических явлений и процессов. Экономические модели, в отличие от технических, основаны не на материальной аналогии объекта исследования, а на аналогии идеальной. Требования, предъявляемые к моделям, определяются их целевым назначением. Например, для объяснения поведения экономических агентов основными требованиями выступают реалистичность допущений и объясняющая способность. В случае определения последствий каких-либо государственной политики, важна предсказательная способность модели.
Большинство экономических моделей являются знаковыми (в сравнении с интуитивными моделями, применяемыми в философии), то есть использующими формулы и графики. Графические модели обладают высокой объясняющей способностью, являются высоко информационно насыщенными.
В микроэкономике применяются в основном модели двух типов: оптимизационные и равновесные. Оптимизационные модели используются при анализе поведения отдельных агентов. Они, в свою очередь, построены на использовании маржинального (предельного) анализа. Отдельный индивидуум или фирма оптимизируют свое поведение, когда достигают максимума полезности при минимизации затрат и усилий. В частности оптимизационными моделями являются модели потребительского выбора, производственные функции фирмы. Равновесные модели используются при изучении взаимодействия между экономическими агентами.К ним относятся модели частичного и общего рыночного равновесия, модели отраслевого равновесия в условиях совершенной и несовершенной конкуренции. Построение равновесных моделей широко используется в макроэкономическом анализе для прогнозирования состояния товарных, денежных и ресурсных рынков.
1.2 Экономические потребности и экономические ресурсы. Понятие рациональности.
Экономическая теория, как было установлено выше, изучает поведение людей в процессе воспроизводства экономических благ с целью удовлетворения потребностей при ограничениях со стороны ресурсов.
Основная мотивация в поведении людей заключается в удовлетворении ими собственных потребностей. Под потребностями понимается нужда или же желание в чем-либо, не обеспеченная доходом человека. Обычно потребности подразделяются на первичные или материальные и вторичные, социальные, в том числе потребности в досуге, труде и творчестве, социальном признании. Разделение потребностей на первичные и вторичные условно и меняется с развитием общества. Как материальные, так и социальные потребности развиваются вместе с развитием производительных сил, частью которых и является человек.
Среди различных классификаций потребностей широко распространена так называемая «пирамида потребностей» американского ученого А. Маслоу, выделившего в структуре потребностей следующие группы: 1) физиологические и биологические потребности (например, голод, жажда и др.); 2) экзистенциальные потребности (в безопасности существования, уверенности в завтрашнем дне, стабильности условий жизни и т. п.); 3) потребности в социальных связях (общени, уважении, дружбе); 4) престижные потребности (в служебном росте, признании, достижении определенного статуса); 5) творческие потребности (в самореализации, раскрытии своих способностей и возможностей). Предложенная А. Маслоу «пирамида потребностей» носит иерархический характер: потребности человека развиваются от низших (биологических) к высшим (социальным). По его мнению, потребности каждого нового уровня становятся актуальными лишь тогда, когда удовлетворены предыдущие потребности. В частности для граждан развитых стран крайне актуальными являются запросы в отношении обеспечения их гражданских и политических прав. Чрезвычайно высокий уровень материальной обеспеченности, (подушевой ВВП превышает 40 тыс.долл) уже не достаточен для полноценного восприятия жизни, активного участия в экономических процессах. В России, напротив, массовая модель потребления граждан демонстрирует сильную зависимость от материальных ценностей. Данные социологических опросов свидетельствуют о том, что потребности в продуктах питания не удовлетворены для 9% беднейшего населения, а потребности в предметах одежды актуальны еще для 22% граждан[3]. Иначе говоря, треть общества объективно не имеет возможностей формировать потребности более высокого порядка с учетом ограниченности в доходах.
Вследствие ограниченности экономических ресурсов невозможно добиться одновременного и полного удовлетворения потребностей всех граждан одновременно. «Истина заключается в том, что общество, может быть, и способно удовлетворить все потребности отдельных людей, но тогда оно лишает этого других, вынуждая их перейти на более низкий уровень потребления. Либо оно способно удовлетворить отдельные потребности всех людей, но тогда уровень удовлетворения других потребностей будет гораздо ниже уровня насыщения. Общества, которое может удовлетворить все потребности всех граждан, нет не только в настоящее время, но не будет и в перспективе. Как бы ни возрастало благосостояние, развитие техники и культуры всегда будет способствовать дальнейшему увеличению материальных потребностей»[4]. Иначе говоря, потребности людей в различных благах, не имеют предела насыщения.
В процессе удовлетворения потребностей индивидуумы максимизируют полезность при минимальных издержках ,то есть ведут себя рационально. Выдающийся австрийский экономист Й. А. Шумпеттер отмечает, что способность человека действовать как рациональное существо, как «логическое животное» равнозначна дарвиновской теории борьбы за выживание. Подобно тому, как в этой борьбе развился большой палец человека, мозг человека развивается в процессе решения экономических проблем.
Представления о человеке как рационально действующем субъекте связаны, прежде всего, с моделью экономического человека (homo economicus), предложенной А.Смитом.Происхождение важнейших социальных институтов (общины, разделения труда, денег и др.) А.Смит выводил из природы человека, который руководствуется своими собственными эгоистическими интересами, улучшением своего положения. Эти «естественные усилия» отдельного индивида и являются постоянно действующим стимулом экономического прогресса всего общества.
В современной научной литературе для обозначения экономического человека используется акроним REMM(resourceful, evaluative, maximizing man- англ.), что означает «изобретательный, оценивающий, максимизирующий человек». Такая модель предполагает, что человек следуя своей функции полезности, ведет себя рационально. Это предусматривает следующие условия:
· информация, необходимая для принятия решения, полностью доступна индивиду;
· человек следует своим эгоистическим интересам, и не учитывает, как изменится благосостояние других людей в результате его действий;
· экономический обмен ведёт к максимизации полезности, и не существует внешних ограничений в отношении его.
Поскольку в неоклассической модели рационального человека не учитывается возможность влияния решений одних людей на решения других, возникли альтернативные модели социального человека. Они представлены в исследованиях голландского социолога С.Линденберга.
Первая модель (акроним SRSM) – социализированный человек, исполняющий роль, и человек, который может быть подвержен санкциям. Данная модель характеризует человека, полностью контролируемого обществом. В целях полной социализации граждан предусматривается, как закрепление за ними общественных функций, так и возможность ограничения их прав и свобод.
Вторая модель (акроним OSAM) – человек, имеющий собственное мнение, восприимчивый, действующий. Этот человек имеет собственное мнение относительно процессов протекающих в обществе. Восприимчивость означает зависимость в поведении индивида от общественных оценок. Вместе с этим данный тип поведения лишен изобретательности и ограничений, которые присущи рациональному типу поведения.
Институциональный подход обогатил модель человеческого поведения допущениями об ограниченной рациональности, порождаемой условиями неопределенности и риска, сопровождающих выбор. Модель ограниченной рациональности. Г.Саймона характеризуетпроцесс принятия решения как поиск и принятие удовлетворительного варианта. В каждый момент времени у человека есть определенный «уровень притязаний». Выбор удовлетворительного варианта требует от него меньшей информированности и счетных способностей, чем в неоклассической модели. Отпадает необходимость иметь точную информацию об исходе данного варианта и сравнение его с исходами альтернативных вариантов в рамках общей функции полезности. Достаточно интуитивного представления о том, что данный вариант выбора выше или ниже приемлемого уровня.
Постулат ограниченности ресурсов является отправным моментом позитивной экономической науки. Экономические ресурсы (или факторы производства) - это элементы, используемые для производства экономических благ. Ресурсы общества состоят из земли (природных ресурсов), капитала, труда и предпринимательства. Впервые систематизация ресурсов была приведена в теории факторов производства французского экономиста, последователя А.Смита- Ж.Б.Сея.
Первичным фактором производства во всех системах признается земля или природные ресурсы. Природные ресурсы - это естественные блага, которые используются при создании товаров и услуг. К ним относятся живая природа, минеральные, лесные и водные ресурсы, земля. Особенность земли как экономического ресурса заключается в том, что она, во-первых, имеет неограниченный срок службы и невоспроизводима по желанию; во-вторых, по своему происхождению она природный фактор, а не продукт человеческого труда; в-третьих, земля не поддается перемещению, свободному переливу из одной отрасли в другую, из одного региона в другой; в-четвертых, земля, используемая в сельском хозяйстве, при рациональной эксплуатации не только не изнашивается, но и повышает свое плодородие.
Капитал — понятие, используемое для обозначения экономического ресурса, созданного людьми для повышения производительной силы их труда. В отличие от земли капитал имеет ограниченный срок службы, поскольку подлежит физическому и моральному износу. Под капиталом в физическом смысле понимаются производительные блага, которые затрачиваются в процессе производства полностью (оборотный капитал) или же по частям (основной капитал). Однократно используемые активы (сырье, материалы), окупаются после каждого производственного цикла, тогда как активы, используемые в производстве длительный период (здания, машины и оборудование) окупаются в течение своего срока службы. Кроме того, понятие «капитал» применяется также для обозначения финансовых активов.
Степень износа основного капитала (основных производственных фондов) в России чрезвычайно высока. Федеральные ведомства оценивают ее на уровне 45-65%, а исследовательские центры РФ - минимум в 60-65%. Для сравнения отметим, что уровень износа капитала по группе стран БРИКС, не превышает 35%[5]. Особенно велик износ в подотраслях машиностроения, где он приближается к 70%. Уровень производства станков в стране снизился с 70 тыс. единиц в 1991 г. до 3,3 тыс. в 2012 г., а именно, в 20 раз. За этот период количество станков в стране сократилось с 2млн.единиц, до 1, 5 млн.единиц, ежегодные потери вследствие выбытия составляют 50 тыс. единиц[6].
В этой связи первоочередными задачами развития производства на современном этапе становится технологическая модернизация. Она предусматривает на первом этапемассовое обновление капитала в секторах и отраслях, обладающих потенциальной конкурентоспособностью (сырьевой сектор, сельское хозяйство, авиационная промышленность, транспортное машиностроение). Впоследствии доходы, полученные от реализации этих инвестиций, направляются на обеспечение технологической модернизации основной массы обрабатывающих отраслей.
Труд как экономическая деятельность представляет собой физические и умственные усилия людей в процессе производства. Неоклассическая экономика исходит из первичности человеческого фактора в отношении остальных с учетом интересов человеческой личности. Существуют и другие определения данного фактора, в т.ч. рабочая сила, человеческий фактор, трудовые ресурсы общества.
Оценивая потенциал общества с точки зрения труда, чаще всего, используется показатель экономически активного населения, а именно той доли трудовых ресурсов, которая непосредственно осуществляет предложение рабочей силы на рынке труда. В настоящее время в России численность экономически активного населения составляет 75676 тыс. человек, из них непосредственно занятых в экономике 71 545 тыс. человек (94,0 %)[7].
Наряду с количественной характеристикой труда используется его качественная характеристика. Показателями качества рабочей силы выступает образовательная структура занятого населения, профессионально-квалификационная структура, уровень безработицы, поло-возрастная структура. Образовательная структура рабочей силы в наибольшей степени выражает уровень развития человеческого капитала. К настоящему моменту Россия является мировым лидером по доле лиц с высоким формальным образованием. Согласно международному классификатору данная категория лиц включает в себя работников имеющих третичное образование типа А (российский эквивалент- высшее образование) и третичное образование типа В (российский эквивалент- среднее профессиональное образование). По данным статистики 56% занятого населения России принадлежат к лицам с высоким формальным образованием (29% - высшее и 27% - среднее профессиональное). Относительно занятых в возрасте от 25-64 лет доля лиц с ВПО возрастает до 31%, лиц со СПО-37%.[8]
Вместе с этим масштабы недоиспользования человеческого капитала на нашем рынке впечатляющи. По оценкам специалистов около трети всех работников с с высоким формальным образованием заняты на рабочих местах, не требующих высокой квалификации. Это означает, что знания и навыки, полученные работниками в системе формального образования, либо не находят применения, из-за недостатка высокопроизводительных рабочих мест, либо отличаются низким качеством. Потери в человеческом капитале равнозначны падению эффективности рабочей силы, отставанию производительности труда в сравнении с аналогичными показателями развитых стран. Если уровень ВВП на душу населения в России будет в границах среднеразвитой страны (ниже 30 тыс. долл на человека по паритету покупательной способности), то разрыв между высоким образованием рабочей силы и низкой производительностью ее труда будет сохраняться и даже нарастать.
Предпринимательство представляет собой особую форму ведения хозяйства, которая опирается на самостоятельную инициативу индивида, творческий подход, ответственность за результаты и последствия своей деятельности. В этом своем качестве предпринимательство выступает как важнейший фактор производства, приводящий в движение остальные факторы. Таким образом, функция организатора и контролера является базовой в отношении данного понятия. Одновременно с этим предприниматель осуществляет новые комбинации факторов производства, расширяет рынки сбыта, ищет новые формы организации производства. Именно эта инновационная функция получила развитие в концепции предпринимательства Й.А. Шумпеттера. В своем знаменитом исследовании «Теория экономического развития» он характеризует предпринимательство как процесс «творческого разрушения», направленного на преодоление инерционности экономической системы. «Предпринимателями мы называем хозяйственных субъектов, функцией которых является как раз осуществление новых комбинаций и которые выступают как активные субъекты предприятия»,- отмечает автор в своем исследовании.[9]
Инновационная миссия предпринимательства особо актуальна в настоящий момент в связи с переходом России к социально-ориентированной инновационной модели развития. В частности, развитие венчурного инвестирования, является непосредственной формой участия частного бизнеса в финансировании и развитии инновационных проектов. Осуществляя инвестиции в капитал перспективного предприятия, венчурные компании способствуют его становлению на ранней стадии развития. Не менее важными участниками инновационного процесса выступают предприниматели, именуемые бизнес-ангелами. В этом случае финансирование предоставляется на длительный срок, без залогов и гарантий, за долю капитала в компании. Помимо финансов, бизнес-ангелы привносят в компанию ценнейший вклад − опыт в сфере ее деятельности и управленческие навыки, чего обычно не хватает компаниям на начальных стадиях, а также свои связи. Благодаря помощи бизнес-ангелов появились Intel, Yahoo, Amazon, Google, Fairchild Semiconductors и многие другие ведущие технологические бренды.
Относительнаяограниченность ресурсовозначает, что они ограничены в сопоставлении с неограниченными потребностями граждан. Существует также и абсолютнаяограниченность ресурсов, понимаемая как их физическая исчерпаемость. Истощение ресурсной базы активизировалось в период индустриализации мировой экономики: за период после Второй мировой войны человечество потребило больше сырья, чем за всю свою предшествующую историю.
Особенно остро встал вопрос о достаточности энергетических ресурсов. В 1956 году американский геолог Марион Кинг Хубберт представил свою теорию: процесс нефтедобычи всегда соответствует колоколообразной кривой. Вначале она растет, пока не достигнет вершины, а затем неудержимо падает. Кривая Хубберта, открытая ровно 50 лет назад, с научной точностью отражает истину: нефть — невозобновляемый ресурс, ее запасы сокращаются с высокой скоростью. Другие важные источники энергии — природный газ, уголь, уран — подчинены такому же процессу. По подсчетам ученых количество потребляемой ежесекундно нефти составляет около 1000 баррелей. Например, каждый немец за свою жизнь потребляет 225 тонн бурого и каменного угля, 116 тонн нефти, 40 тонн стали, 1,1 тонны меди и 200 кг серы. По прогнозам Федерального ведомства по геонаукам и сырью США, в ближайшие 10—20 лет будет достигнута так называемая середина истощения, говорится в его последнем исследовании. То есть половина общего запаса сырой нефти окажется использованной. Именно в тот момент, когда нефтедобыча во всем мире достигнет своего максимума, впервые в истории возникнет физический дефицит энергетического сырья: объемы производства начнут падать, в то время как потребление, согласно всем прогнозам, будет продолжать расти. В настоящее время 33 из 48 крупнейших добывающих стран достигли этого порога или уже перешагнули его. В их числе Великобритания и Норвегия, так как лучшие времена Северного моря позади: за 5 лет добыча здесь сократилась более чем на 20%. Королевство Саудовская Аравия, добывая около 10 млн. баррелей в день, использует свои производственные мощности на пределе. Основное саудовское месторождение - самое большое на планете нефтяное поле Гавар (5 млн. баррелей в сутки) - истощается.[10] Истощение крупнейших месторождений мира, избыточное налогообложение нефтяных компаний, удорожание инвестиций с учетом особенностей добычи ведут к стагнации добычи в большинстве нефтяных держав. При сохранении текущих трендов Россия, по оценкам российских и американских геологов достигнет баланса производства и внутреннего спроса на углеводороды в интервале от 2019 до 2028 года. Подобный баланс, когда страна из экспортера нефти превращается в основного ее потребителя, является неоспоримым доказательством прохождения пика добычи.
Существует и более оптимистическая оценка относительно прогноза использования ресурсов. В соответствии с ней, потенциал сырьевых ресурсов далеко не исчерпан, и существуют огромные месторождения, например, в Арктике. Кроме того, благодаря инновационным методам всегда удавалось добывать сырья больше, чем ожидалось . В основании подобных прогнозов лежит несложный расчет: запасы уже разработанных месторождений сырья соотносятся с годовым потреблением соответствующих ресурсов. По этим подсчетам, сырой нефти хватит еще более чем на 40 лет, газа — больше чем на 60, угля — на целых 200 лет.
Все большее значение в составе энергетических ресурсов получает газ, который более экономичен и экологичен. Лишь 18% предполагаемого общего потенциала уже использовано. Большие запасы газа, как и сырой нефти, расположены в политически нестабильных областях, в России, Иране и Катаре: эти три государства владеют примерно 56% всех мировых запасов. Их должно хватить еще на несколько десятилетий.
1.3 Проблема выбора и кривая производственных возможностей. Альтернативные издержки и эффективность использования ресурсов.
Проблема выбора в экономике решается не только отдельными субъектами -человеком или фирмой, но и обществом как единым целым. Общество осуществляет свой выбор, когда решает: в какой пропорции распределяться ресурсы между производством гражданских и военных товаров, потребительских и инвестиционных благ. Наконец выбор осуществляется между эффективным распределением ресурсов и справедливым распределением доходов, экономической системой с преобладанием административных и рыночных элементов.
Необходимость осуществлять общественный выбор порождается ограниченностью ресурсов, которая рассматривалась в предыдущем параграфе.
Сущность проблемы выбора можно проиллюстрировать с помощью простейшей модели- «кривой производственных возможностей». КПВ строиться при следующих допущениях:
· экономика функционирует в условиях полного и эффективного использования всех ресурсов. Последнее означает получение максимального объема продукции при заданном объеме затрат;
· в конкретных условиях общество имеет дело с постоянным количеством ресурсов: труд, земля, капитал неизменны как по количеству, так и по качеству;
· заданность технологических процессов, исключающая в рассматриваемый период нововведения, изменения отраслевой структуры;
· рассматривается двухпродуктовая модель с условными товарами представителями-Х и У.
Выбор общества состоит в комбинации средств производства (У) и предметов потребления (Х). Увеличение предметов потребления ценой отказа от средств производства, означает, что ресурсы общества ограничены. Общество может выйти за границы производственных возможностей либо путем наращивания ресурсов, либо путем повышения их отдачи, т.е. через технические и организационные нововведения.
Построение кривой производственных возможностей позволяет применить нетрадиционный способ измерения затрат: вместо обычной денежной оценки используется оценка в единицах непроизведенных благ (в нашем случае средств производства). Такие затраты называются альтернативнымиили затратами упущенных возможностей. Альтернативные издержки можно рассматривать как цену выбора в пользу какого-либо блага.
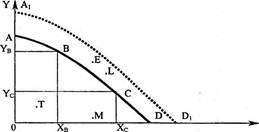
Кривая производственных возможностей имеет выпуклую форму ( рис.1.1 ). Это связано с тем, что эффективность использования различных ресурсов разная. Меняя структуру производства в пользу предметов потребления нам придется вовлекать в производство все менее пригодные для этого ресурсы, т.е. все больше сокращать выпуск средств производства. По мере приближения к любой из осей координат наклон кривой будет увеличиваться, то есть альтернативные затраты будут расти. Закон возрастания альтернативных затрат обусловлен нарушением принципа специализации ресурсов, используемых в производстве товаров Х и У.
Все точки, находящиеся на КПВ являются эффективными, т.е. отвечающие такой комбинации ресурсов при которой нельзя увеличить производство одного товара без сокращения производства другого. Принцип эффективного распределения ресурсов получил название Парето-эффективности по имени итальянского экономиста В.Парето. Эффективность по Парето это такой уровень организации экономики, когда общественное благосостояние (национальный доход) максимально и невозможно при заданных ресурсах и технологиях перераспределить доход в пользу одних не уменьшая при этом дохода других.
Рис. 1.1 Кривая производственных возможностей
Построим график производственных возможностей, который характеризует определенную комбинацию товаров двух видов. Например, точка В представляет комбинацию Хв - единицу предметов потребления и Yb - единицу средств производства. Точки, находящиеся внутри области производственных возможностей (точки Т, М), представляют такую комбинацию средств производства и предметов потребления, при которой не все ресурсы полностью используются. Точки, расположенные вне кривой (точки Е,L), характеризуют недостижимый выпуск продукции при полном использовании ресурсов и существующей технологии. Таким образом, кривая АD характеризует одновременно и желательный, и возможный выпуск товаров. Именно из точек, лежащих на этой кривой и представляющих различные возможные сочетания выпуска средств труда и предметов потребления, мы и должны выбрать ту, которая для нас наиболее предпочтительна.
Всякое увеличение производства предметов потребления предполагает уменьшение производства средств труда. Двигаясь в этом направлении, общество увеличивает удовлетворение своих текущих потребностей. Однако такая политика может дорого обходится. Переключение ресурсов в пользу потребительского сектора со временем нанесет удар самому обществу, так как потенциал будущего производства снижается. Жертвование текущим потреблением высвобождает ресурсы, которые могут быть использованы для увеличения производства средств труда. Наращивая, таким образом, запас своего капитала, общество может рассчитывать на больший объем производства, а поэтому и на большее потребление в будущем.
Таким образом, в данный момент времени экономика полной занятости и полного использования материальных ресурсов должна жертвовать частью продукта (X), чтобы больше получить продукта (Y), и наоборот. Ограниченность ресурсов не позволяет одновременно увеличивать X и Y. В долгосрочном периоде общество может выйти за границу своих производственных возможностей либо за счет техники и экономических нововведений, либо за счет увеличения производственных ресурсов (открытие новых месторождений полезных ископаемых, вовлечение в производственную деятельность дополнительных трудовых ресурсов, строительство новых предприятий и т.д.).
Если новая техника, новые технологические процессы будут внедряться одновременно и равномерно во всех отраслях, то кривая производственных возможностей АD на рисунке сдвинется в положение штриховой линии А1D1. Возможности выпуска и средств производста, и предметов потребления увеличатся примерно в равной степени.
Таким образом, КПВ дает представление о четырех взаимосвязанных понятиях:
· экономическом выборе
· редкости ресурсов
· альтернативных затратах
· эффективности экономики.
[1] Смит А. Исследование о природе и причинах богатства народов. М., 2005. С. 24.
[2] Маршалл А. Принципы политической экономии. Т.1. М., 1983. С.56.
[3] Исследования Фонда общественного мнения о состоянии потребительских бюджетов российских семей. Левада—центр.//levada.ru
[4] Корнаи Я. Дефицит. М.,1990. С. 35
[5] http:// www gks.ru. Основные производственные фонды. 2012.
[6] Ассоциация «Станкоинструмент». Данные выборочного обследования состояния основных производственных фондов . 2012 г.
[7] http:// www gks.ru.Трудовые ресурсы.2012.
[8]Сайт Федеральной службы статистики. Статистический бюллетень 2011 г -http:// www gks.ru
[9] Шумпетер Й.А. Теория экономического развития: Исследование предпринимательской прибыли, капитала, кредита, процента и цикла коньюктуры: Пер. с нем. – М., 1982. – С.63
[10] В.Полтерович. Механизмы «ресурсного проклятия» и экономическая политика. Вопросы экономики. // №1 2008, с.5
Управление энергетическими объектам на базе дискретных и непрерывных законов регулирования
Свойства автоматических систем регулирования зависят от свойств объекта и от свойств регулятора. Поэтому при проектировании АСР, учитывая свойства объекта, обосновывают применение того или иного типа регулятора, чтобы система автоматического регулирования была по возможности простой, надежной и имела свойства, удовлетворяющие требованиям эксплуатации в отношении точности поддержания регулируемого параметра и качества переходного процесса.
Таким образом, в зависимости от свойств объекта и эксплуатационных требований к его параметрам выбирается тот или иной тип регулятора и формирующий им закон регулирования.
Настройку систем автоматического регулирования можно осуществить только при знании обслуживающим персоналом теоретических основ автоматического регулирования.
1. Виды управляющих алгоритмов в системах автоматического регулирования
В холодильной и криогенной технике, а также в системах кондиционирования воздуха, широкое распространение получили промышленные автоматические регуляторы, реализующие различные законы регулирования.
Уравнение регулятора, отображающее закон его регулирования, устанавливает зависимость формирования управляющего (выходного) сигнала U(τ), воздействующего на регулирующий орган РО, от отклонения регулируемой величины Δy (входного сигнала) от заданного значения.
Таким образом, закон регулирования – это вид математической зависимости между выходной и входной величинами регулятора.
Упрощенная структура автоматической системы регулирования приведена на рис. 3.1.
Регулируемая величина y объекта автоматизации, значение которой в текущий момент времени обозначен yт, поступает на вход элемента сравнения ЭС регулятора и сравнивается с заданным значением yзад. На выходе ЭС формируется сиг-нал рассогласования Δy = yзад - yт, величина которого является исходными данными для формирования управляющего сигнала. По значению Δy и виду закона
Рис. 3.1.Функциональная схема АСР
регулирования, заложенного в усилитель-формирователь УФ, на выходе автоматического регулятора АР формируется сигнал управления U, параметры которого определяют поведение регулирующего органа РО (скорость и величину перемещения).
Входная величина объекта регулирования x (вещество или энергия), влияющая на состояние регулируемой величины y, под воздействием РО, преобразуется в регулирующее воздействие xр, способные скомпенсировать возмущение G, отклонившее регулируемую величину от заданного значения.
По виду управляющего сигнала, законы регулирования подразделяются на дискретные или позиционные (двух-, трех- и многопозиционные), и непрерывные: пропорциональный (П), интегральный (И), дифференциальный (Д), и их комбинации: пропорционально-интегральный (ПИ), пропорционально-дифференциальный (ПД) и пропорционально-интегрально-дифференциальный (ПИД). В соответствии с этими законами, непрерывные промышленные регуляторы обозначаются как П-регулятор, ПИ-регулятор, ПД-регулятор и ПИД-регулятор, а дискретные регуляторы получили название: двух-, трех- или многопозиционные регуляторы.
Регуляторы с различными законами регулирования имеют свои, свойственные им, переходные процессы, в результате которых происходит перемещение регулирующего органа и изменение подачи вещества или энергии на объект регулирования.
Для обеспечения требуемого качества технологического процесса в объекте регулирования, в переходном режиме, выбирается тип регулятора и осуществляется расчет его настроечных параметров. Расчет параметров настройки регулятора производится по динамическим показателям объекта регулирования: постоянной времени Тоб и величине запаздывания τоб.
2. Принцип формирования двухпозиционного регулирования
Автоматические регуляторы двухпозиционного регулирования осуществляют квантование выходного сигнала U по амплитуде, определяющей величину хода (перемещения) регулирующего органа (ХРО).
Выходной сигнал позиционного регулятора может принимать несколько строго фиксированных значений (позиций ХРО): «включено - выключено» («открыто - закрыто»), «закрыто - среднее положение - открыто» и т.д. Таким образом, позиционные регуляторы подразделяются по числу фиксированных значений выходного сигнала на двухпозиционные, трехпозиционные и многопозиционные.
Двухпозиционные регуляторы это такие, у которых выходной сигнал U имеет два фиксированные значения «включено» или «выключено», а регулирующий орган может принимать только одно из двух положений «открыто» или «закрыто».
При непрерывном изменении входного сигнала y и достижении им крайнего, например, максимального значения ymax происходит срабатывание регулятора и на его выходе скачком появляется сигнал U=1. Регулирующий орган занимает при этом крайнее положение в пределах хода, например, открыт на 100% (рис. 3.2). Изменение входного сигнала в обратную сторону до значения ymin приводит к отключению сигнала на выходе регулятора (сигнал U=0) и перемещению регулирующего органа в другое крайнее положение, например, закрытое, т.е. 0% ХПО.
Как было показано выше, РдП-регулятор описывается нелинейным (дискретным) уравнением вида:
(3.1)
Разность значений регулируемой величины, при которых происходит переключение выходного сигнала Рдп-регулятора, является настроечным параметром и называется зоной нечувствительности или дифференциалoм.
Дифференциал Рдп-регулятора:
Δу = ymax – ymin = 2·æ, (3.2)
где æ – разность между граничными значениями дифференциала и заданным значением yз регулируемой величины (см. рис.3.2).
Управляющее воздействие двухпозиционного регулятора реализуется путем включения и отключения исполнительных устройств, например, приводных двигателей компрессоров, насосов, вентиляторов, соленоидных вентилей, моторных исполнительных механизмов и т.д.
Процесс двухпозиционного регулирования в любом статическом одноемкостном объекте, обладающем запаздыванием, изображен на рис. 3.3.
У
Рис. 3.3. График двухпозиционного регулирования в статическом объекте.
Обозначения на графике: У – регулируемая величина объекта; τ – время; Х – степень открытия соленоидного вентиля, %; ΔУд – дифференциал двухпозиционного регулятора в значении регулируемой величины (заданный дифференциал); Уд.н, Уд.в – соответственно нижнее и верхнее граничные значения дифференциала; ΔУз – диапазон поддержания регулируемой величины с запаздыванием (фактический дифференциал); Уз.н, Уз.в – соответственно нижнее и верхнее граничные значения заданного диапазона; Уу.с,Уу.в – установившееся значение регулируемой величины при ее снижении и возрастании; τц – время цикла колебания регулируемой величины; τс, τв – части времени цикла при снижении и возрастании регулируемой величины с учетом запаздывания объекта; τд.с., τд.в. – составляющие времени снижения и возрастания регулируемой величины, соответствующие величине дифференциала; τз.с., τз.в. – составляющие времени снижения и возрастания регулируемой величины, обусловленные величиной запаздывания объекта регулирования.
Рассмотрим рабочий процесс регулирования температуры в холодильной камере, обозначенный величиной y.
Из рис. 3.3 видно, что вначале процесса регулирования соленоидный вентиль СВ закрыт, т.е. х=0% и регулируемая величина (температура в камере) повышается. Так как объект обладает свойством самовыравнивания, то при отсутствии регулятора температура в камере установилась бы на значении yу.р. Однако, при повышении температуры до значения yд.в. (т.А) двухпозиционный регулятор включает соленоидный вентиль (х=100%) подачи холодильного агента в испаритель. Учитывая, что объект обладает запаздыванием, то температура не начинает сразу понижаться, а продолжает расти до значения yз.в. (т.В). Дойдя до этого значения, температура начинает понижаться и при отсутствии регулятора она достигла бы установившегося значения yу.с. При снижении температуры до значения yд.н. (т.Д) регулятор формирует сигнал на закрытие СВ, однако регулируемая величина в течение времени запаздывания τз.с. продолжает понижаться, достигая значения yз.н. (т.Е). Достигнув значения yз.н., температура вновь будет повышаться и достигнув значения yд.в. (т.L) регулятор открывает СВ (х=100%), но в течение времени запаздывания τз.в. температура будет продолжать расти, достигая значения yз.в. (т.О), а затем вновь ее значение начнет понижаться, и т.д.
При двухпозиционном регулировании Рдп–регулятор настроен на дифференциал Δyд, однако фактическое изменение регулируемой величины определяется диапазоном Δyз из-за наличия запаздывания в объекте.
Рабочий и нерабочие режимы при двухпозиционном регулировании, характеризующие соответственно время снижения и нарастания температуры, сменяют друг друга в течение всего времени работы автоматической системы регулирования, т.е. переходной процесс носит характер непрерывных колебаний. Спадающая и возрастающая ветви полупериодов колебаний являются участками кривых разгона.
В свою очередь, спадающий участок характеристики, в данном случае, определяет рабочий режим регулятора, когда СВ открыт (τрб или τс) и осуществляется подача жидкого холодильного агента на испаритель, а возрастающая – нерабочий режим (τст или τв), - когда объект находится только под действием теплопритоков
Колебания такого рода называются автоколебаниями, которые характеризуются следующими параметрами:
- периодом автоколебаний (называется также временем цикла):
τц = τрб + τст, (3.3)
где τрб – длительность рабочей части цикла;
τст – длительность нерабочей части цикла;
- частотой автоколебаний (частотой включения авторегулятора в час):
fa = 1/τц; (3.4)
- коэффициентом рабочего времени:
Крв = τрб/τц; (3.5)
- амплитудой колебаний:
Аф = ymax-ymin. (3.6)
К достоинствам двухпозиционного регулирования следует отнести быстродействие по отработке рассогласования по отклонению регулируемой величины от заданного значения, невысокая стоимость, простота технической реализации и обслуживания.
К недостаткам двухпозиционного регулирования относится недостаточная точность регулирования, колебательный режим процесса регулирования и наличие пусковых перегрузок машин и аппаратов, являющихся объектами автоматизации.
3. Принцип регулирования на базе непрерывных законов
Регуляторы непрерывного действия это такие, в которых непрерывному изменению входной величины y соответствует непрерывное изменение выходного, управляющего воздействия U.
К регуляторам с непрерывными законами относятся - пропорциональный (П), интегральный (И), дифференциальный (Д), и их комбинации: пропорционально-интегральный (ПИ), пропорционально-дифференциальный (ПД) и пропорционально-интегрально-дифференциальный (ПИД). В соответствии с этими законами, непрерывные промышленные регуляторы обозначаются как П-регулятор, ПИ-регулятор, ПД-регулятор и ПИД-регулятор.
3.1. Пропорциональный регулятор (П-регулятор)
У таких регуляторов связь между выходной и входной величинами описывается уравнением:
ΔU=Kp·Δy , (3.17)
при условии, что регулятор на выходе имеет величину U=0, если Δy = 0.
Переходной процесс, соответствующий данному закону регулирования, представлен на рис.3.6.
П-регулятор при отклонении регулируемой величины Δy от заданного значения y0=yзад, скачком пропорционально изменяет регулирующее воздействие на величину ΔU.
Параметром настройки П-регулятора является коэффициент передачи Кр=ΔU/Δy и означает на сколько процентов регулятор перемещает регулирующий орган при отклонении регулируемой величины y от заданного значения yзад на Δy=1 ед. измерения.
Пример, при значении Кр=15 %/1атм., т.е. при отклонении давления от заданного на величину ΔР=1атм, регулятор переместит регулирующий орган на 15%.
Вывод:П-регуляторы в основном используются на объектах, где допускается остаточное отклонение регулируемой величины.
3.2. Интегральный регулятор (И-регулятор)
Данный тип регулятора устанавливает значение регулирующего воздействия от отклонения регулируемой величины в соответствии с уравнением:
, (3.18) где Кри – коэффициент передачи И-регулятора по скорости, характеризует скорость формирования выходного сигнала dU/dt регулятора, определяющего скорость перемещения регулирующего органа, при отклонении регулируемой величины, так как из выражения (3.18) следует:
dΔU/dt=Кри·Δy, (3.19)
т.е. Кри отображает скорость перемещения регулирующего органа при отклонении y от yзад на 1 ед. измерения.
Пример: Коэффициент передачи равен Кпи = (10%/мин/1атм) – это значит, если изменить давление на 1 атм. от заданного значения, то регулятор будет перемещать РО со скоростью 10% в минуту до крайнего положения.
Коэффициент передачи Кпи является единственным параметром настройки И-регулятора.
Переходная характеристика И-регулятора приведена на рис. 3.7.
Рис. 3.7
Коэффициент передачи может быть представлен как Кпи=1/Ти, где Ти – параметр характеризующий постоянную времени интегрирования и равен времени, в течение которого с момента поступления на вход регулятора сигнала ошибки Δy сигнал на выходе И-регулятора достигнет значения соответствующего значению входного сигнала. Следовательно, по истечении времени τ =Ти =τи-τ0 значение выходного сигнала станет равным входному U01=y01.
Из уравнений (3.18) и (3.19) следует, что величина отклонения регулируемой величины Δy будет влиять лишь на скорость перемещения регулирующего органа и определяться значением tgα=Δy/Ти=du/dτ. Установившееся положение РО (скорость du/dτ=0) возможно лишь при Δy=0, т.е. когда статическая ошибка равна нулю.
И-регуляторы являются астатическими регуляторами и осуществляют перемещение РО пропорционально интегралу отклонения регулируемой величины до тех пор, пока не восстановится ее заданное значение.
Вывод: Достоинством И-регуляторов является их способность регулировать без остаточного отклонения регулируемой величины от заданного значения, а недостатком – невысокая скорость регулирования. Они могут быть использованы для объектов обладающих самовыравниванием, так как АСР с объектом без самовыравнивания является неустойчивой. И-регуляторы обычно применяются в комплекте с регуляторами, формирующими другие законы регулирования.
Это такой регулятор, у которого изменение выходной величины U пропорционально как изменению входной величины Δy, так и интегралу ее изменения:
(3.20)
Параметрами настройки ПИ-регулятора является коэффициент передачи Кр=ΔU/Δy (как и для П-регулятора) и постоянная времени интегрирования Ти (время изодрома) – Это время за которое интегральная составляющая регулятора будет формировать его выходной сигнал U и соответственно перемещать РО с большей или меньшей скоростью, определяемой значениями настройки этого параметра.
Если при настройке ПИ-регулятора установить очень большую величину постоянной времени Ти, то он превращается в П-регулятор. Если же при настройке установить очень малые значения Кр, то получим И-регулятор с коэффициентом передачи по скорости 1/Ти.
Переходная характеристика ПИ-регулятора приведена на рис.3.8.
После скачкообразного изменения входной величины Δy в момент времени τ0 выходная величина U (и соответственно положение РО) под действием пропорциональной составляющей закона регулирования (3.19) мгновенно переходит из значения U0 в новое значение U1, пропорциональное отклонению Δy регулируемой величины и соответствующее настоящему значению коэффициента передачи Кр: U1=Кр·y0.
Затем под действием интегральной составляющей на выходе регулятора формируется сигнал дополнительно перемещающий регулирующий орган в ту же сторону с постоянной скоростью y0/Ти, пропорциональной отклонению регулируемой величины ΔУ. Выходная величина U (ПИ-регулятора) при одном и том же значении Δy будет изменяться с большей скоростью, в случае настройки регулятора на меньшее время интегрирования Ти1 и наоборот, скорость изменения U будет меньше, если установить большее время интегрирования Ти2.
Вывод: Пропорционально-интегральные регуляторы используются на объектах, где недопустимо остаточное отклонение регулируемой величины.
Данный регулятор реализует закон регулирования (переходную характеристику) в виде:
. (3.21)
ПИД-регуляторы имеют три настроечных параметра: Кр – коэффициент передачи регулятора, Ти – время изодрома, Тд – время предварения.
Дифференциальная составляющая реагирует на скорость изменения регулируемой величины. В установившемся режиме, когда скорость dΔy/dτ=0 этот регулятор не отличается от пропорционально-интегрального. Однако, при быстром изменении Δy, дифференциальная составляющая уравнения (3.21) значительно превзойдет величину Δy и клапан РО в первый момент откроется почти полностью. Если изменение входного параметра U произойдет не мгновенно, а через время Δτ (т.е. со скоростью Δy/Δτ), то дополнительная величина открытия клапана в период Δτ будет равна Тд·Δy/Δτ, где коэффициент Тд является временным настроечным параметром регулятора.
Переходная характеристика ПИД-регулятора приведена на рис.3.9.
При скачкообразном изменении регулируемой величины идеальный ПИД-регулятор в начальный момент времени мгновенно оказывает максимально большое воздействие на РО (перемещая его в крайнее положение), определяемое дифференциальной составляющей регулятора. Затем, величина воздействия падает до значения определяемого пропорциональной частью регулятора. После этого, аналогично действию ПИ-регулятора, постепенно начинает оказывать влияние интегральная составляющая регулятора, перемещая регулирующий орган с постоянной скоростью до установившегося значения.
Настройка регулятора позволяет изменять качество управления объектом посредством изменения значений его параметров: при Тд=0 и бесконечно большой величины Ти, получаем П-регулятор; при Тд=0 получаем ПИ-регулятор; при бесконечно большой величине Ти и конечных значениях Кр и Тд получаем ПД-регулятор.
Вывод: ПИД-регуляторы не обладают остаточной неравномерностью и используются для объектов, в которых недопустимо остаточное отклонение и к параметрам качества регулирования предъявляются более жесткие требования по длительности переходного процесса и максимальному динамическому отклонению регулируемой величины от заданного значения.
4. Выбора закона регулирования энергетическими объектами
Выбор автоматического регулятора сводится к выбору его уравнения (закона регулирования), устанавливающего связь между выходной величиной регулятора U и сигналом на входе y в переходном режиме объекта автоматизации.
Основными показателями, влияющими на выбор типа регулятора, являются динамические показатели объекта регулирования (рис.2.2.) и показатели качества переходного процесса, протекающего в автоматической системе регулирования (рис.3.10).
а) б)
Рис.3.10. Типы переходных процессов в АСР:
а) переходной процесс с И, ПИ и ПИД – регуляторами без остаточного отклонения (астатический); б) переходной процесс с П и ПД – регуляторами и остаточным
отклонением (статический).
Для затухающего переходного процесса, представленного на рис.3.10а, регулируемая величина в конце процесса регулирования возвращается к заданному значению y0, или не возвращается, рис.3.10б, когда ее новое установившееся значение отличается от y0 на величину Δyост, называемую остаточным отклонением.
Условием полного возвращения регулируемой величины к y0 является наличие в законе регулирования интегральной составляющей.
Пунктирные кривые (кривые разгона объекта с самовыравниванием) получены при отключенном регуляторе.





 Переходной процесс, соответствующий данному закону регулирования, представлен на рис.3.6.
Переходной процесс, соответствующий данному закону регулирования, представлен на рис.3.6. , (3.18) где Кри – коэффициент передачи И-регулятора по скорости, характеризует скорость формирования выходного сигнала dU/dt регулятора, определяющего скорость перемещения регулирующего органа, при отклонении регулируемой величины, так как из выражения (3.18) следует:
, (3.18) где Кри – коэффициент передачи И-регулятора по скорости, характеризует скорость формирования выходного сигнала dU/dt регулятора, определяющего скорость перемещения регулирующего органа, при отклонении регулируемой величины, так как из выражения (3.18) следует:
 (3.20)
(3.20)
 . (3.21)
. (3.21)
 а) б)
а) б)