Промышленный робот «Электроника НЦ ТМ - 01» предназначен для обслуживания токарных станков, а именно для загрузки и выгрузки деталей типа тел вращения диаметром до 150 мм и высотой до 150 мм, а также может использоваться при производстве деталей электронной промышленности.
2.ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ РОБОТА «Электроника НЦ ТМ-01»
Наименование параметров
Фактические значения
Горизонтальное перемещение схватов по оси Х, м
- не менее 0,30
Средняя скорость перемещения по оси Х, м/с
- не менее 0,04
Горизонтальное перемещение схватов по оси Y, м
- не менее 0,30
Средняя скорость перемещения по оси Y, м/с
- не менее 0, 08
Вертикальное перемещение схватов по оси Z, м
- не менее 0,16
Средняя скорость перемещения по оси Z, м/с
- не менее 0,032
Рабочее перемещение каждого кулачка механизма захвата деталей, мм
- не менее 5
Погрешность позиционирования в автоматическом режиме, мм
- не хуже ±0,5
Грузоподъемность робота, кг
- 2 × 3,0
3. Устройство и ПРИНЦИП работЫ
3.1. Основные узлы промышленного робота
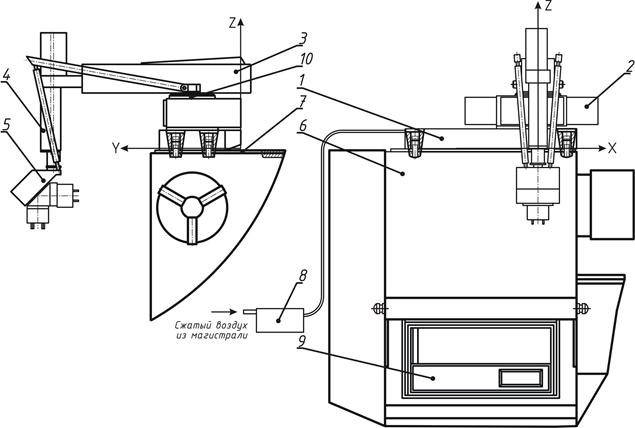
Манипулятор электромеханического промышленного робота «Электроника НЦ ТМ-01» (рис. 1) состоит из следующих конструктивных узлов:
механизма горизонтального перемещения по оси Х;
механизма поворота;
механизма горизонтального перемещения по оси Y;
механизма подъема по оси Z;
механизма захвата детали;
блока подготовки воздуха.
Рис. 1. Электромеханический промышленный робот «Электроника НЦ ТМ-01»: 1 – механизм горизонтального перемещения по оси Х; 2 - механизм поворота; 3 – механизм горизонтального перемещения по оси Y; 4 – механизм подъема по оси Z; 5 - механизм захвата детали; 6 – стол; 7 – промежуточная плита; 8 – блок подготовки воздуха; 9 –блок управления; 10– манипулятор электромеханический.
3.2. Механизм горизонтального перемещения по оси Х
Механизм горизонтального перемещения по оси Х (рис. 2) обеспечивает перемещение каретки с механизмом поворота и рукой манипулятора робота по направляющим с помощью исполнительного устройства, обеспечивающего реверсивный режим работы и выполненного на основе двух двигателей постоянного тока ДП32-4-3-27- IМЗ682-Р09 с напряжением питания 27В и механической передачи. Управление приводами обеспечивает два уровня скорости. Динамическое торможение обеспечивается релейным ключом, статическое - двумя фрикционными электромагнитными тормозами.
В цепи обратной связи установлен импульсный датчик пути 4 АУБ178.32.00.000 с дискретность – 0,4мм/импульс, датчики начального положения 2 АУБ178.32.00.000 и датчики конечного положения 3 АУБ178.32.00.000.
Механизм горизонтального перемещения по оси Х служит основанием робота и состоит из корпуса, в котором закреплены цилиндрические направляющие 3 для перемещения каретки 4 с установленными в ней шариковыми втулками 6, значительно уменьшающими силу трения.
Перемещение каретки осуществляется от привода 1, момент от которого через зубчатую передачу 2 передается на винт шариковинтовой пары 5, воздействующий на шариковую гайку, установленную в каретке.
Рис.2. Механизм горизонтального перемещения по оси Х: 1 – двигатель, 2 – зубчатая передача, 3 – направляющие, 4 – каретка, 5 – шариковинтовая пара, 6 – шариковая втулка
3.3. Механизм поворота
Механизм поворота (рис. 3) обеспечивает вращение руки робота относительно вертикальной оси на фиксированный угол в 90˚, что позволяет совмещать продольную ось заготовки с осью шпинделя токарного станка или базовой осью другого технологического оборудования. А также в другом крайнем положении дает возможность роботу по программе забирать заготовки из магазина или устанавливать готовые детали в накопитель. Поворот осуществляется с помощью исполнительного устройства, обеспечивающего реверсивный режим работы и выполненного на основе двух двигателей постоянного тока ДП40-10-3-27-IМЗ682-Р09 с напряжением питания 27В и двух механических передач, первая из которых представляет собой встроенный редуктор с цилиндрическими колесами, а вторая - открытый одноступенчатый конический редуктор. Управление приводами обеспечивает два уровня скорости. Динамическое торможение обеспечивается релейным ключом, статическое – выдвижным фиксатором. В электрической схеме предусмотрены два датчика: начального положения АУБ178.32.00.000 - bн, и конечного положения АУБ178.32.00.000 - bк.
Механизм поворота установлен на каретке 5 механизма горизонтального перемещения (рис. 2) и состоит из корпуса 1 (рис. 3), на котором закреплен привод 2, коническая зубчатая передача которого через ведущее 3 и ведомое колеса 4 передает момент от двигателя с встроенным цилиндрическим редуктором на водило 5 и через ролик 8 мальтийскому кресту 6. На мальтийском кресте в подшипниках установлен стакан 7. Вращение водила 5 осуществляется от привода 2 через коническую передачу. Для фиксации мальтийского креста в крайних положениях используется выдвижной фиксатор 9, управляемый кулачком 10, кинематически связанным через коромысло 11 с водилом 5. Датчики начального и конечного положения переключаются рычагом 12, управляемым штифтом 14, который установлен на водиле.