Мехатронные машины – это интеллектуальные многомерные системы, построенные на мехатронных принципах и технологиях и работающие в изменяющихся условиях внешней среды. ММ содержат два и более мехатронных модуля.
Внешнюю среду ММ можно разделить на две
Ø детерминированную, когда параметры возмущенных воздействий заранее можно определить с необходимой точностью;
Ø недетерминированную, когда внешние воздействия по своей природе являются заранее неопределенными (например, экстремальные подводные, подземные и космические среды).
В состав ММ входят четыре части:
1. механическое устройство с конечным звеном рабочего органа;
2. блок приводов, включающий силовые преобразователи и исполнительные двигатели;
3. устройство компьютерного управления, на вход которого подаются команды ЭВМ верхнего уровня или от человека-оператора;
4. информационное устройство, служащее для получения и передачи в устройство компьютерного управления данных о реальном перемещении машины и о состоянии ее подсистем.
Механическое устройство представляет собой многозвенный механизм, кинематическую цепь которого образуют движущиеся звенья (кинематические пары). Конечное звено – рабочий орган. Механическое устройство и двигатели объединены в группу исполнительных устройств.
По числу степеней подвижности механические устройства делятся на:
Ø специализированные устройства ;
Ø универсальные устройства ;
Ø избыточные устройства .
Специализированные устройства по сравнению с универсальными имеют ограниченные кинематические возможности и проектируются под конкретную задачу.
Универсальные устройства обеспечивают в декартовом пространстве перемещение рабочего органа как твердого тела с 6 степенями свободы.
Избыточные механизмы самые сложные и дорогостоящие. Их применяют, когда требуется оптимизировать конфигурацию цепи в средах с препятствиями.
Рабочий орган мехатронной машины – это составная часть МУ для непосредственного выполнения технологических операций. В свою очередь рабочий орган может состоять из нескольких элементов (модулей) и иметь несколько степеней подвижности. Например: мотор-шпиндель.
Рабочая зона машины – совокупность всех точек декартового пространства, которые достигнуты рабочим органом машины.
Погрешность позицирования – отклонение положения рабочего органа от желаемого, заданного программой движения. Эти отклонения – случайные величины и представляют собой сферу, центр которой является координатой целевой точки, а радиус равен паспортной величине погрешности позиционирования машины.
Погрешность отработки траектории – аналогичена погрешности позиционорования. Рабочий орган МС находится внутри пространственной трубки, ось которой есть программная траектория. Радиус трубки равен паспортной погрешности обработки траектории.
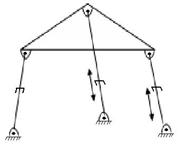
Машины МПК. Одним из наиболее перспективных и эффективных путей уменьшения погрешностей позиционирования рабочего органа является создание МПК[4]. В основе их конструкции обычно лежит платформа Стюарта. МПК имеет основание и подвижную платформу, соединенную подвижными стержнями управляемой длины. Шарниры стержней имеют не менее двух степеней подвижности. На подвижной платформе крепится рабочий орган. Изменяя длины стержней, управляют перемещением и ориентацией подвижной платформы.
Для МС, где требуется управление пространственным движением по шести степеням свободы, необходимо соответственно шесть стержней (они называются «гексакоды», гекса – шесть). Если управляемых стержней три, то это «трипод».
Преимущества МС с параллельной кинематикой:
Ø высокая точность исполнения движения;
Ø высокие скорости и ускорения рабочего органа;
Ø отсутствие традиционных направляющих.
Несущими элементами являются сами исполнительные механизмы, поэтому имеем улучшенные массо-габаритные параметры и низкую материалоемкость:
1. В МС с МПК не происходит суперпозиций (наложения) погрешностей звеньев при переходе от базы к рабочему органу.
2. Стержневые механизмы МПК обладают высокой жесткостью, так как двухстепенные шарниры крепления стержней не подвержены изгибающим моментам. Они работают только на растяжение-сжатие.
3. Применяются прецизиозные датчики обратной связи и измерительные системы лазерные и компьютерные методы коррекции перемещений рабочего органа.
Имея высокую точность позиционирования, МПК могут применяться как обрабатывающее оборудование на станках, так и в качестве измерительных машин.
Например, трипод-сканер для измерения размерностей или копиры. Полученная цифровая информация от копира о геометрии эталонного образца передается в CAD/CAM-систему для автоматического производства копий.
Обобщенными координатами для МПК принимают длины управляющих стержней (их называют - координатами). Координатные оси БИД МПК пересекаются под произвольными углами.
В МС нового поколения для осуществления больших перемещений применяем комбинацию последовательной и параллельной структурных кинематических цепей. Например, комплекс для обработки крупногабаритных пресс-форм, имеют для глобальных перемещений декартовые направляющие и модуль с МПК (трипод или гексапод) для осуществления точных локальных движений.
МС с гибридными структурами кинематических цепей присуща нелинейность между показателями качества машины (точностью, материалоемкостью,
максимальной скоростью, габаритами, производительностью и ценой). Нелинейность этих взаимосвязей означает, что для повышения, например, точности движения нет необходимости увеличивать массогабаритные параметры, а просто незначительным изменением одних параметров можно скачкообразно добиться изменения критерия качества. Поэтому одним из мехатронных способов создания машин с качественно новыми свойствами является поиск нетрадиционных координатных базисов, оптимальных для поставленных функциональных задач.

 механические устройства делятся на:
механические устройства делятся на: ;
; ;
; .
. Погрешность отработки траектории – аналогичена погрешности позиционорования. Рабочий орган МС находится внутри пространственной трубки, ось которой есть программная траектория. Радиус трубки равен паспортной погрешности обработки траектории.
Погрешность отработки траектории – аналогичена погрешности позиционорования. Рабочий орган МС находится внутри пространственной трубки, ось которой есть программная траектория. Радиус трубки равен паспортной погрешности обработки траектории. - координатами). Координатные оси БИД МПК пересекаются под произвольными углами.
- координатами). Координатные оси БИД МПК пересекаются под произвольными углами.