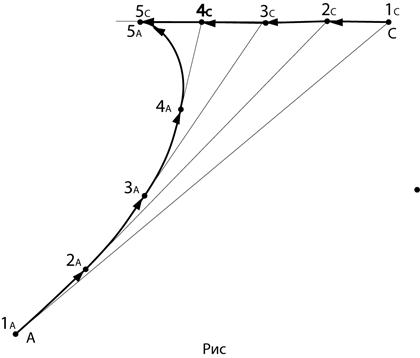
При изложении этой темы будет рассмотрено наведение ДСА на цель и законы управления, реализующие тот или иной метод наведения. Существуют пять классических методов наведения аппарата на цель. 1) Наведение по лучу. 2) Прямое наведение. 3) Наведение с упреждением. 4) Параллельное сближение. 5) Пропорциональное сближение. Эти пять классических методов непосредственно используются в реальных аппаратах или используются как основа для построения реальных методов наведения. Рассмотрим поочередно каждый из пяти классических методов наведения. Наведение по лучу. Суть наведения по лучу состоит в следующем. Рассматриваются три точки. Точка А – точка, в которой находится наводящийся аппарат. Точка С - точка, в которой находится цель. Точка N - точка, из которой визируется цель. Точка N может быть неподвижной или движущейся. Наведение аппарата А по лучу состоит в том, чтобы он оставался на линии, соединяющей точку N и точку С (см. рис.).
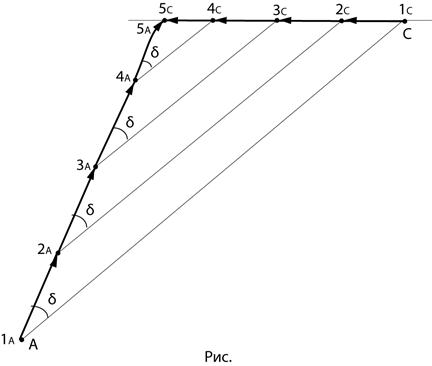
Из точки N визируется цель - точка С (измеряется угол ), и визируется аппарат – точка А (измеряется угол ). Вычисляется . Величина передается на аппарат. Система управления траекторией движение аппарата повернет аппарат так чтобы . Если движение аппарата начинается из направления на цель, то траектория аппарата может быть представлена, как показано на рисунке. В начале наведения аппарат находится в точке 1А, а цель – в точке 1С. Встречается аппарат и цель в точке 6А (6С). Особенность траектории наведения по лучу характерна тем, что при отсутствуют участки с бесконечно большой угловой скоростью разворота аппарата. Исторически наведение по лучу начало использоваться на воздушном участке движения аппарата (в системах ПВО). Углы визирования и измерял радиолокатор, размещенный в точке N. Разность по радиоканалу передавалось на аппарат и использовалось в системе управления траекторией движения. При старте аппарата чаще всего , и аппарат выполнял начальный маневр прежде чем выйти кривую сближения по лучу. В настоящее время наведение по лучу используется на воздушном участке при неподвижной и подвижной точке N. На подводном участке движения аппарата непосредственно наведение по лучу не используют. Применяют похожие варианты этого метода, в частности теленаведение. Прямое наведение. Это метод сближения, при котором вектор скорости аппарата непрерывно направляется на цель. Кривую сближения при прямом наведении иногда называют кривой погони или собачьей кривой. Кривая сближения при варианте догона имеет вид
Кривая сближения при варианте встречного движения имеет вид
Особенность траектории сближения при прямом наведении состоит в следующем. Независимо каково сближение –встречное или вдогон, аппарат атакует цель сзади. При встречном движении аппарата и цели на заключительном участке сближения требуется большая угловая скорость разворота аппарата , а при возможно потребуется . Иначе случится промах. Реализация больших угловых скоростей разворота аппарата существенно усложняет конструкцию аппарата. Несмотря на этот недостаток метод прямого наведения широко применяется на практике. Это объясняется в основном малым объемом информации при целеуказании – необходимо знать только углы азимута и места. Метод прямого наведения применяется на воздушном и подводном участках движения. Наведение с упреждением. Это метод сближения, при котором угол между направлением скорости аппарата и направлением аппарат – цель остается постоянным. Кривая сближения при наведении с упреждением в варианте догона имеет следующий вид. Символом обозначен угол упреждения. Следует обратить внимание, что аппарат поражает цель под углом к вектору скорости цели, а не точно вдогон. Траектория сближения при встречном движении имеет вид.
На этом рисунке также видно, что аппарат сближается с целью не сзади, а вообще с передней полусферы. Параметры траектории на участке атаки зависят от и углов и . Возможно даже бесконечно большое значение угловой скорости разворота аппарата при атаке ( ). Это возможно при . В случае можно подобрать такой угол упреждения , который не вызывает бесконечно большой угловой скорости разворота. Следует иметь ввиду, что при аппарат вообще не попадет в цель, а будет совершать движение вокруг цели. Параллельное сближение. Это метод сближения, при котором направление аппарат – цель остается в пространстве неизменным. Для прямолинейного движения цели метод параллельного сближения является частным случаем наведения с упреждением. Часто этот метод называют наведением в упрежденную точку. Пропорциональное сближение. Это метод сближения, при котором угловая скорость вращения вектора скорости аппарата пропорциональна угловой скорости вращения линии аппарат – цель. Для написания уравнений движения воспользуемся следующим рисунком
В соответствии с приведенным рисунком для и имеем , ,
. Первое уравнение представляет продольную скорость расстояния между целью и аппаратом. Второе – поперечную скорость расстояния между целью и аппаратом. Третье уравнение описывает зависимость, указанную в определении метода пропорционального сближения. Интегрируя третье уравнение, получим , где начальное значение угла . Если принять и , то получим прямое наведение. Если принять и , то получим прямое наведение с упреждением. Если принять , то будем иметь параллельное сближение. Приведенные уравнения имеют аналитическое решение только для . В других случаях исследования требуется проводить только в численном виде.
Однотактные усилители мощности
Однотактные усилители мощности. Усилитель мощности обычно является выходным каскадом усилительного устройства. Усилительные каскады, содержащие один или несколько параллельно включённых усилительных элементов, на входы которых подают одно входное напряжение и с выхода которых снимают одно выходное напряжение усиленного сигнала, называют однотактными. Они используются для получения в нагрузке сравнительно небольших мощностей. Однотактные каскады могут выполняться в зависимости от величины нагрузки с бестрансформаторным и трансформаторным её включением в выходную цепь каскада. Если нагрузка низкоОмная то спользуют трансформаторный каскад
Достоинства: простота; отсутствие потерь мощности в выходном устройстве, дополнительных частотных и нелинейных искажений; возможность усиления сигналов в широкой полосе частот.
Недостатки: низкий КПД; протекание через нагрузку постоянной составляющей тока питания; наличие на нагрузке постоянного потенциала относительно общего провода.
Двухтактные усилители мощности. Двухтактные усилители мощности позволяют получить более высокий кпд, чем однотактный усилитель мощности. Для этого используется режим В или АВ. В двухтактных схемах усилителей мощности использование режи ма А . Выходное напряжение подаётся на базу транзистора.Если верхняя часть тран. Имеет знак+ то няжняя -, то можно считать средняя точка имеет потенциал 0.. Траннз ВТ 1 открыт а ВТ2 закрыт. След. В транз. Под. Верхняя часть синусойды, она же и передается а нагрузку.Если вых. Напряж. Противоположно то наоборот в нагрузку под. Няжняя часть синусойды. Оба транз. Работают в режиме Б, для создR1 в такой схеме значительные нелинейне искажения. Причина-нелинейость харак. Транз для их умен. Примен. Режим АБ для этого необходимо сместить напряж базы по постоянному току отеносительно напряжения эммитера. Для того чтобы созд. Это смещение устан. Диод ВД1.
Усилители постоянного тока. Правильнее было бы назвать Усил гальван колеб(УГС) в УГС отсутсвтует для связи между каскадами конден. В УПТ для связи между каскадами исп резистерная связсь. КОнден или трансфор создают изберательность к частотам . конндеры пропускают высокие а трансфр низкие. В УГС их нет след. Они пропускает одинаково все частоты в УГС отсутсвуют частотнеы искажения. Связи созд за счёт непосредственного соед. усилителей. УГС усиливают постоянную и переменную сигналы. , частотные искажения возникают только за счёт транзистеров. УГС примен. В усилителях низкой и высокой частоты.Если в 1 каскаде созд ток смещения то в последующих каскадах он усилив.
Дрейф 0 и борьба с ним. Отсутсвие конденсатора между каскадми приводи к тому что любое изменение пост. Сост. Предедущ каскада усиливает послед. Каскадам. Этот сигная воспринимается как полезный сигнал. Явленеи называется дрефом 0.На дреф 0 больше всего влияет 1 каскад, чем ближе каскад к выходу тем меньше его влияние. Приведенный ток дрефа 0 это такой ток который должен был быть в 1 каскаде чтобы в послед. Каскаде был дрефовый ток. Причины дрефового тока: измен температуры окр. Среды.2) изменение сост. Окр. Среды.3) старение элементов.4) нестабильность ист.пит. Уменьшить дреф 0 можно : 1) введением термостабилизации 2) стабилизировать источник питания 3) введение обратной связи по постоянному току.
Структура и основные параметры ОУ. ПРИМЕНЕНИЕ ОУ
ОУ выпуск. В промышлен. В виде микросхем которые исп. в датчиках. Основным видом ОУ явл. Балансный диферен.усил. (БУ). В БУ имеется 2 одинаковых каскада на 2 транзисторах. Дифференциальный каскад усиливает разность входных сигналов Uвх=Uвх1–Uвх2. Коэффициент усиления для дифференциального сигнала при симметричном выходе можно выразить:
Характерной чертой дифференциального каскада является его нечувствительность к синфазному сигналу. При равенстве Uвх1= Uвх2разность входных сигналов Uвх=Uвx1-Uвх2 равна нулю. Поэтому выходное напряжение должно быть также равным нулю.


 ), и визируется аппарат – точка А (измеряется угол
), и визируется аппарат – точка А (измеряется угол  ). Вычисляется
). Вычисляется  . Величина
. Величина  передается на аппарат. Система управления траекторией движение аппарата повернет аппарат так чтобы
передается на аппарат. Система управления траекторией движение аппарата повернет аппарат так чтобы  . Если движение аппарата начинается из направления на цель, то траектория аппарата может быть представлена, как показано на рисунке.
. Если движение аппарата начинается из направления на цель, то траектория аппарата может быть представлена, как показано на рисунке.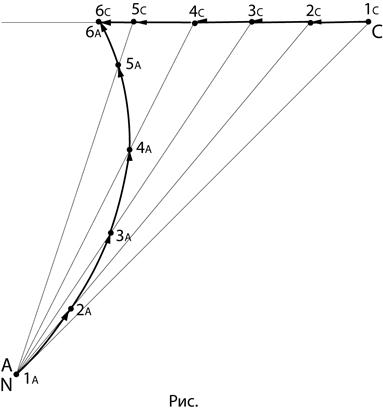
 отсутствуют участки с бесконечно большой угловой скоростью разворота аппарата.
отсутствуют участки с бесконечно большой угловой скоростью разворота аппарата. , и аппарат выполнял начальный маневр прежде чем выйти кривую сближения по лучу. В настоящее время наведение по лучу используется на воздушном участке при неподвижной и подвижной точке N.
, и аппарат выполнял начальный маневр прежде чем выйти кривую сближения по лучу. В настоящее время наведение по лучу используется на воздушном участке при неподвижной и подвижной точке N.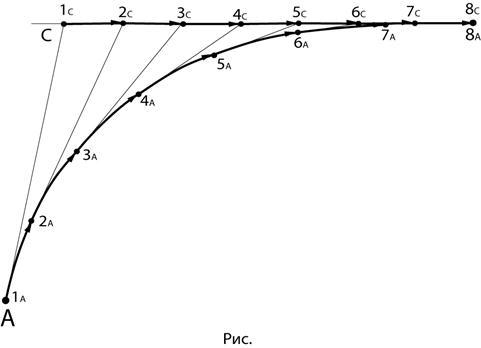
 , а при
, а при  возможно потребуется
возможно потребуется  . Иначе случится промах. Реализация больших угловых скоростей разворота аппарата существенно усложняет конструкцию аппарата.
. Иначе случится промах. Реализация больших угловых скоростей разворота аппарата существенно усложняет конструкцию аппарата. обозначен угол упреждения. Следует обратить внимание, что аппарат поражает цель под углом к вектору скорости цели, а не точно вдогон.
обозначен угол упреждения. Следует обратить внимание, что аппарат поражает цель под углом к вектору скорости цели, а не точно вдогон.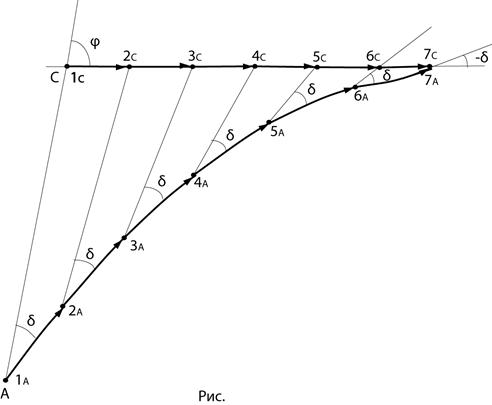
 и углов
и углов  . Возможно даже бесконечно большое значение угловой скорости разворота аппарата при атаке (
. Возможно даже бесконечно большое значение угловой скорости разворота аппарата при атаке (  . В случае
. В случае  можно подобрать такой угол упреждения
можно подобрать такой угол упреждения  аппарат вообще не попадет в цель, а будет совершать движение вокруг цели.
аппарат вообще не попадет в цель, а будет совершать движение вокруг цели.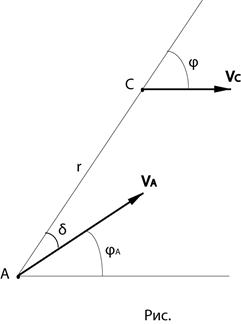
 и
и  имеем
имеем ,
, ,
, .
. ,
, начальное значение угла
начальное значение угла  .
. и
и  , то получим прямое наведение.
, то получим прямое наведение.  , то получим прямое наведение с упреждением.
, то получим прямое наведение с упреждением. , то будем иметь параллельное сближение.
, то будем иметь параллельное сближение. . В других случаях исследования требуется проводить только в численном виде.
. В других случаях исследования требуется проводить только в численном виде. Выходное напряжение подаётся на базу транзистора.Если верхняя часть тран. Имеет знак+ то няжняя -, то можно считать средняя точка имеет потенциал 0.. Траннз ВТ 1 открыт а ВТ2 закрыт. След. В транз. Под. Верхняя часть синусойды, она же и передается а нагрузку.Если вых. Напряж. Противоположно то наоборот в нагрузку под. Няжняя часть синусойды. Оба транз. Работают в режиме Б, для создR1 в такой схеме значительные нелинейне искажения. Причина-нелинейость харак. Транз для их умен. Примен. Режим АБ для этого необходимо сместить напряж базы по постоянному току отеносительно напряжения эммитера. Для того чтобы созд. Это смещение устан. Диод ВД1.
Выходное напряжение подаётся на базу транзистора.Если верхняя часть тран. Имеет знак+ то няжняя -, то можно считать средняя точка имеет потенциал 0.. Траннз ВТ 1 открыт а ВТ2 закрыт. След. В транз. Под. Верхняя часть синусойды, она же и передается а нагрузку.Если вых. Напряж. Противоположно то наоборот в нагрузку под. Няжняя часть синусойды. Оба транз. Работают в режиме Б, для создR1 в такой схеме значительные нелинейне искажения. Причина-нелинейость харак. Транз для их умен. Примен. Режим АБ для этого необходимо сместить напряж базы по постоянному току отеносительно напряжения эммитера. Для того чтобы созд. Это смещение устан. Диод ВД1.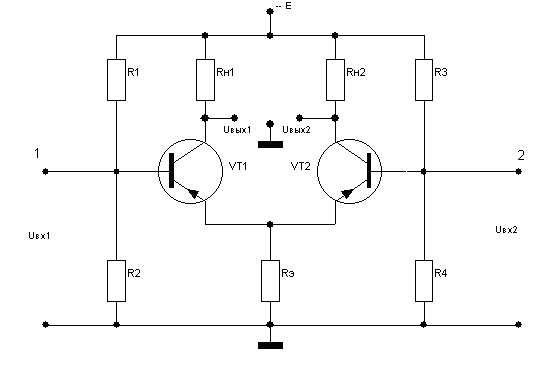 Дифференциальный каскад усиливает разность входных сигналов Uвх=Uвх1–Uвх2. Коэффициент усиления для дифференциального сигнала при симметричном выходе можно выразить:
Дифференциальный каскад усиливает разность входных сигналов Uвх=Uвх1–Uвх2. Коэффициент усиления для дифференциального сигнала при симметричном выходе можно выразить: