Почему возникла необходимость в использовании КЭШ?
Динамическая ЗУ обладает на порядок меньше быстродействием. Основная ЗУ отстает от процессора. У статической ЗУ стоимость выше на порядок. Компромисс - в основную память вводится КЭШ память.
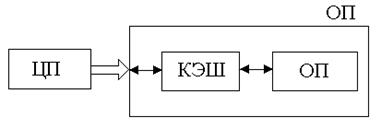
Суть: в операционную память добавляется блок КЭШ памяти. Обладает высоким быстродействием. С точки зрения процессора КЭШ не видна при обращении в ОП, но в ОП КЭШ присутствует. В КЭШ память отображается тем или иным способом ОП своими участками, и если поступает запрос от ЦП, то этот то этот запрос к ОП проходит сначала в КЭШ память, и если в ней запрашиваемое слово есть, то говорят о «попадании» процессора, а если слово отсутствует и обращается в основной массив ОП, то говорят о «промахе». Обращение к КЭШ требует меньшего времени чем к ОП. Основано на принципе локальности по обращению. Суть: если выполняемая команда из программы, то для выполнения программы требуется рядом текущая команда по адресу. Поэтому, если мы выбираем команду, а в ОП заносим команду рядом лежащую, то скорее всего буде попадание. Быстродействие увеличивается.
Архитектура КЭШ и ОП и их взаимосвязь
Рисунок 147. Архитектура КЭШ и ОП
Связь процессора с КЭШ осуществляется специальной системой данных, более многоразрядной чем системная шина.
Как преобразует ИС из ОП в КЭШ?
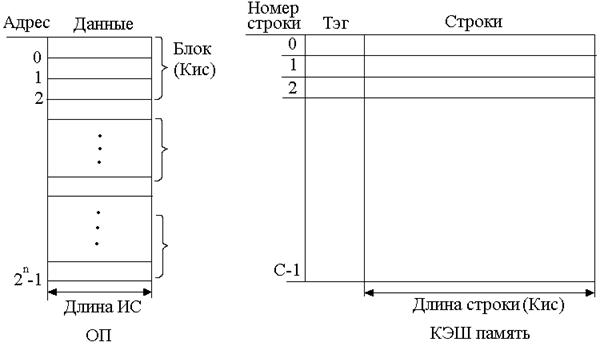
Рисунок 148. Связь ОП с КЭШ памятью
С<<M
Используется принцип локальности по обращению.
Память данных в ОП имеет 2n BC c номерами от 0 до (2n -1). Они разбиваются на блоки одинаковой длины. В каждом блоке собираются K ИС. Число таких блоков: M=2n/K.
У КЭШ памяти есть понятие строки, число которых С, которые имеют номера от 0 до (С-1). Длина каждой строки Кис. У каждой строки есть признак, который обозначается тэг.
Если выполняется команда из верхнего блока (0, 1 .. M-1), то все слова из этого блока размещаются в определенной строке КЭШ. Если работаем с каким-нибудь ИС, то рядом с ним есть другие ИС, необходимые для операции. Поэтому блоки ОП определенным образом размещаются в строках КЭШ.
Обычно признак строки (тэг) нужно сформировать. Используется часть адреса, который выставляет ЦП при запросе в ОП. Тэг берется оттуда.
Что влияет на эффективность такой архитектуры ОП с КЭШ?
1. Емкость КЭШ;
2. Размер строки КЭШ;
3. Способ отображения ОП на КЭШ память;
4. Алгоритм замещения информации в заполненной КЭШ памяти.
Если КЭШ заполнена, то нужно чем-то жертвовать (есть алгоритм);
5. Алгоритм согласования ОП с содержанием КЭШ;
6. Число уровней КЭШ:
a. КЭШ L1 (на кристалле процессора);
b. КЭШ L2 (на материнской плате с микросхемами ОП);
Кроме этого существует дисковая КЭШ и проектируется КЭШ L3.
Емкость КЭШ памяти.
Определение параметров ёмкости КЭШ с точки зрения:
1. Стоимости. Нужно выбирать КЭШ малой ёмкости, тогда и стоимость окажется не очень высокой.
2. Быстродействия. Если увеличить ёмкость, то следует применять микросхемы памяти повышенной ёмкости для КЭШ. Тогда чем более громоздкой будет ёмкость, тем медленней станет работать КЭШ.
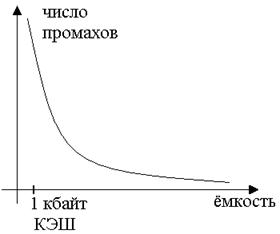
Рисунок 149. Зависимость вероятности числа промахов от ёмкости КЭШ
Если увеличиваем ёмкость КЭШ памяти, то число промахов уменьшается. Оптимальное значение для ёмкости лежит в пределах от 1 до 512 кбайт.
Заметно, что имеет смысл сделать КЭШ двухступенчатой: первый уровень будет находиться в пределах кбайт, а второй – в пределах сотни кбайт.
Как влияет на эффективность длина строки?
Когда размещаем в строки К информационных слов, то туда помещаются и соседние ИС. Увеличивая ёмкость строки, К растет, значит вероятность промахов падает. Когда размер становится излишне большим, вероятность промахов увеличивается при увеличении строки. Если строки удлиняются, то при заданном объеме КЭШ их число падает, а если число строк С будет уменьшаться, то возникает необходимость замены содержимого строк, что приведет к замедлению работы.
Для длины строк имеется оптимальное значение в районе 4 – 8 ИС. Длина строки выбирается равной ширине ШД, соединяющих ЦП с КЭШ.
Способы отображения ОП на КЭШ память
Сущность отображения ОП на КЭШ – копирование блока ОП в строку КЭШ, одну из С строк. Если в запросе выставляется адрес интересующего нас ИС, то в рамках работы КЭШ памяти должна быть переадресация этого адреса из ОП в КЭШ память.
Требования:
1) Способ должен обеспечивать быструю проверку КЭШ памяти на наличие в ней необходимой копии блока ОП.
2) Обеспечивать быстрое преобразование адреса блока ОП в адрес строки КЭШ.
3) Все выполнения 2 предыдущих требований осуществлено экономными средствами.
Пример.
mОП=256 кИС
mКЭШ=2 кИС
Очевидно, что если mОП=256 кИС, то для адресации требуется 18 разрядов. ОП в этом случае разбивается на К блоков, где К=16.
Количество блоков: M=218/24=214
Значит, что из 18 разрядов адреса 4 младших разряда, которые определяют ИС в блоках, а оставшиеся 14 – адресуют блок.
Требуется 11 разрядов.
Как образовать адрес строки?
В строке 16 ИС, требуется 11 разрядов, из которых 4 младших разряда – для адресации внутри строки, а 7 – для адресации самой строки (адрес строки в КЭШ). Эти 7 оставшихся разрядов используются для образования тега (признака строки). Как они используются? Зависит от способа отображения ОП на КЭШ.
Способы отображения ОП на КЭШ разделяются на три группы:
1) прямой способ отображения;
2) полностью ассоциативный способ отображения;
3) комбинированный способ отображения (частично ассоциативный способ отображения).
Рассмотрим прямой способ отображения ОП на КЭШ память:
КЭШ память ОП
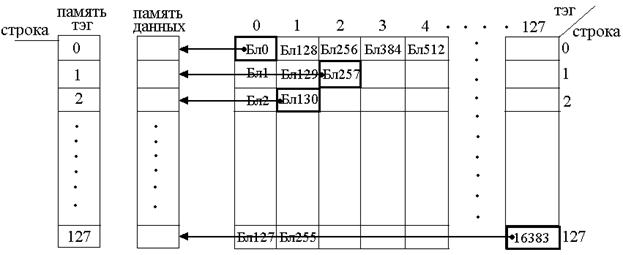
Рисунок 150. Прямой способ отображения ОП на КЭШ
В соответствии с числовыми параметрами адресация строк проводится с 7-разрядным адресным кодом, т.е. 27=128 строк (0..127). Отводится 7 разрядов на память тэгов, число которых равняется 128.
В чем же состоит суть прямого отображения?
j блок ОП отображается в i блоке КЭШ. Отображение идет по принципу i=j mod 128.
При отображении мы описываем блок на пересечении тэга и строки.
ЦП выставляет 4 младших разряда для адресации необходимого ИС в строке ОП или в строке КЭШ. Оставшиеся 14 разрядов разбиваются на номер строки и на номер тэга. С помощью этих координат можем задать тот блок ОП, с которым работаем и следовательно можем задать номер строки в КЭШ.
Достоинства и недостатки прямого способа отображения.
Недостатки: если работаем с двумя блоками ОП, расположенных на одной строке, придется перезаписывать информацию в КЭШ. Это замедляет вычислительный процесс.
Чтобы устранить недостаток прямого отображения, используется ассоциативное отображение ОП на КЭШ, при котором любой блок ОП может отображаться в любую строку КЭШ.
n
Общие сведения о бортовых автоматических системах двухсредных аппаратов, наименования автоматических систем и выполняемые ими функции.
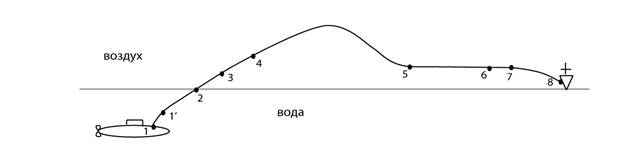
( 2 часа, СРС – 1,5 час) Рассмотрим одну из возможных схем действия ДСА на примере противокорабельной крылатой ракеты с подводным стартом. (Рис.1)
Рис.1 После принятия решения о запуске ракеты, когда ракета находится в пусковой установке (точка 1), выполняются следующие операции: - производятся предстартовые проверки ракеты; - активизируется бортовое электропитание; - из носителя ракеты вводят исходные данные в аппарат, которые определяют начальное положение ДСА, параметры цели, например, дальность, скорость и т.д.; один из возможных вариантов траектории движения, если их несколько, и т.д.
-далее производится старт ДСА, при этом открывается крышка пусковой установки и подается электрический импульс на запал первой ступени стартового ускорителя. Ракета выходит из пусковой установки и начинает движение в воде от точки 1 до точки 2. У нее раскрываются крылья. Движение происходит по некоторой желаемой траектории. Обычно после выхода из контейнера ракета начинает движение под другим углом дифферента, неравным углу наклона контейнера (т.1’). Движение ракеты обеспечивает первая ступень стартовой установки, а система управления траекторией движения обеспечивает движение по заданной траектории.
Затем ракета выходит из воды (точка 2). Как только ракета вышла из воды, подается электрический импульс на запал второй ступени стартового ускорителя и с некоторой задержкой (~ 0,5 c) (точка 3) подается электрический импульс на запал маршевого двигателя. Ракета начинает ускоренное движение на воздушном участке. Как только закончит работать стартовый ускоритель, он отбрасывается при помощи двигателя отброса, который включается при снижении давления в камере сгорания стартового ускорителя (точка 4). Желаемую траекторию движения ракеты (точки 4,5,6,7) обеспечивает система управления траекторией движением (СУ).
На некотором расчетном расстоянии от цели (точка 6) подается сигнал на включение системы обнаружения и пеленгации цели (СОП) (в нашем случае, РЛС). Как только цель обнаружена, выбрана, если их несколько и сопровождается системой СОП начинается участок самонаведения (точки 7-8). Система управления траекторией движения начинает работать в комплексе с системой СОП и изменяет траекторию движения ракеты так, чтобы она попала в цель.
В непосредственной близости от цели может работать система неконтактного взрывателя боекомплекта или таковая может отсутствовать, и будет работать система контактного подрыва БЧ.
Итак, если ракета попала в цель, и произошел подрыв боевой части, то основная цель этого вида оружия выполнена.
Что же обеспечивает выполнение этой цели?
Во-первых – это сам аппарат, в нашем случае это крылатая ракета как конструкция, как средство доставки боевой части определенной массы к цели на определенную дальность с определенной скоростью.
Во-вторых – это энергосиловая установка (двигатель, запас топлива) – обеспечивает движение на определенную дальность и с определенной скоростью; стартовые ускорители – обеспечивают быстрый разгон и старт из контейнеров (из ТПК).
В-третьих – это боевая часть, непосредственно поражающая цель с определенным тротиловым эквивалентом фугасного или кумулятивного действия (или совместного) (осколочного в ПВО).
В-четвертых – это комплекс бортовых автоматических систем (БАС).
Что же входит в комплекс бортовых автоматических систем:
1. Система управления траекторией движения
2. Система автоматики рулевых приводов
3. Система обнаружения и пеленгации целей
4. Программно-временное устройство
5. Система предохранения от несанкционированных действий опасных устройств
6. Система исполнения работы БЧ (неконтактный взрыватель)
7. Система ввода исходных данных
8. Система самоликвидации
9. Система контроля и проверки бортовых систем; 10. Система управления комплексом всех бортовых автоматических систем.
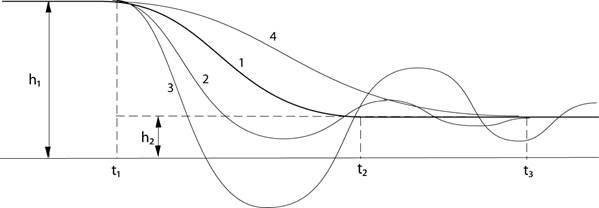
Рассмотрим коротко, что должна делать каждая из указанных систем или устройств автоматики. 1. Система управления траекторией движения. Эта система обеспечивает движение ракеты по требуемой (желаемой) траектории с заданным качеством. Это выполняется путем приложения к ракете некоторого управляющего силового воздействия, формируемого в зависимости от отклонения реальной траектории движения от желаемой (требуемой). Что означает сказанное? Для создания управляющего силового воздействия на ракету существуют управляющие поверхности (рули), создающие дополнительные силы и моменты вокруг связанных с ракетой осей X, Y, Z.Для примера, пусть ракета летит на высоте h1. В момент t1 появилась необходимость сменить высоту полета с h1 на h2.
Рис.2
Система управления должна так переложить горизонтальные рули ракеты, чтобы ракета перешла с высоты h1 на h2. Мгновенно изменить положение ракеты в пространстве невозможно. Но это можно выполнить по-разному (Рис.2). Можно по траектории 1, по траектории 2, по траектории 3, по траектории 4. Отличаются эти траектории качеством переходного процесса. Процесс перехода 4 очень длителен. Процесс 2 имеет некоторую колебательность. Процесс 3 имеет значительную колебательность, приводящую к потере ракеты (вход в воду или землю). Процесс 1. пожалуй, можно считать самым лучшим. Качество переходного процесса является одним из основных требований к системе управления траекторией движения.
На участке движения t < t1 разность между высотой движения ракеты hр(t) и h1 (требуемой) ≈ 0. Как только t > t1 разность между высотой движения ракеты hр(t) и требуемой h2 скачком становится hр - h2 В зависимости от величины этой разности и ее поведения во времени системой управления траекторией движения вырабатываются команды на необходимое отклонение горизонтальных рулей. В конце переходного процесса hр - h2 ≈ 0. Ракета движется на другой высоте. Но на траектории действуют на ракету различные возмущения – порывы ветра, изменения плотности среды и т.д., и ракета стремится отклониться от требуемой высоты полета h2. Система должна обеспечить удержание ракеты на высоте h2. Это так называемый режим стабилизации высоты полета.
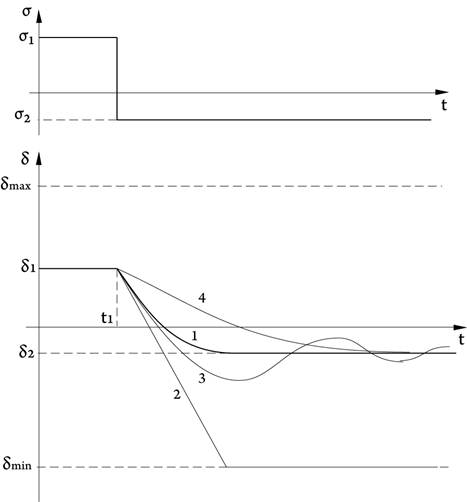
2. Система автоматики рулевых приводов. Система управления траекторией движения не отклоняет рули, а выдает на рулевой привод сигнал – на сколько должны отклониться рули и в какую сторону. Реализует это отклонение рулевой привод совместно с системой автоматики рулевых приводов. Рассмотрим пример.
Рис.3 Пусть до момента t1 от СУ на рулевой привод поступает сигнал σ1 , и в соответствии с ним руль был отклонен на величину δ1 . В момент t1 СУ выдает сигнал σ2 для отклонения руля до величины . И если рулевой привод с системой автоматики правильно спроектированы, то руль будет отклоняться по графику 1. Если система автоматики отсутствует, то руль переложится до упора, а не на δ2 . Если параметры системы автоматики выбраны не очень правильно, то руль может отклоняться либо по 3, либо по 4. Иногда, когда говорят о рулевом приводе, предполагают, что система автоматики рулевого привода уже входит в него.
3. Система обнаружения и пеленгации целей (СОП). Для того чтобы ракета точно попала в цель, в систему управления должны поступать точные значения координат цели. Исходные данные о координатах цели, полученные на носителе ракетного оружия, в большинстве случаев имеют недостаточную точность и чаще всего используются как предварительные, для вывода ракеты в район цели. Для получения более точных данных о координатах цели на ДСА используют системы обнаружения и пеленгации. Для надводного участка атаки эти системы в основном радиолокационного типа, инфракрасного, лазерного, оптического. Для подводного участка - это в основном системы гидроакустического типа. Системы СОП позволяют обнаружить и классифицировать одну или несколько целей. Выделить предпочтительную по тому или иному признаку и в дальнейшем выдавать данные по выбранной цели. Следует иметь в виду, что системы СОП, размещенные на ДСА, выдают информацию относительно координат и осей ДСА. Например, дальность до цели и относительную скорость. Угловые координаты система СОП выдает относительно жестко связанных с ДСА осей X, Y, Z. В режиме, когда СОП следит (выдает информацию) за одной целью, система управления СУ и СОП могут объединяться в одну систему – самонаведения и выводить ДСА непосредственно на цель.
4. Программно-временное устройство (ПВУ). Это устройство достаточно часто встречается в составе автоматических устройств ДСА. Оно предназначено для выдачи некоторых сигналов после истечения некоторого времени после включения. ПВУ может включаться как в момент старта ДСА, так и в определенной точке траектории. Например, в ракете «Аметист» ПВУ включается в момент выхода ракеты из воды. В ракете «Ястреб» ПВУ включается при достижении ракетой глубины 20 м. Все зависит от схемы действия и назначения команд, поступающих от ПВУ.
5. Система предохранения от несанкционированных действий опасных устройств. Наличие этой системы связано с тем, Что ДСА представляет повышенную опасность не только для цели, но и для обслуживающего персонала в условиях арсенала, и для самого носителя. Опасность исходит в основном от боевой части и энергосиловой установки (ТРД, топливо, окислитель). В основном используют многоступенчатые системы предохранения, связанные с различными этапами схемы действия. Блокируются цепи запала двигателя, цепи подрыва БЧ. Блокировки снимаются по мере продвижения ДСА по схеме действия.
6. Система исполнения работы БЧ. Эта система формирует сигнал на подрыв БЧ. Различают в основном контактные и бесконтактные системы исполнения. Подробнее мы остановимся на этом далее в курсе. Здесь сразу хочу отметить связь системы исполнения и системы предохранения. Иногда эти две системы рассматривают как одну в силу их подчас нераздельной связи. Хотя логически это две системы.
7.Следующая в нашем перечне бортовых автоматических систем – это система ввода исходных данных. Технически средства на борту ДСА должны быть выполнены так, чтобы можно было перед стартом ввести глубину хода или высоту, дальность до цели, возможно курс цели, параметры траектории движения, начальное угловое положение и т.д.
8. На некоторых ДСА устанавливают систему самоликвидации. В случае невыполнения боевой задачи (промах, отказ некоторых бортовых систем – пошла в другую сторону) нужно обезвредить ДСА. Для ДСА с подводным конечным участком предварительно затапливают аппарат (если тонет), а затем подрывают. На воздушном участке – подрывают либо специальным зарядом, либо подрывом БЧ.
9. Система контроля и проверки бортовых систем. ДСА должен быть построен так, чтобы перед погрузкой ДСА на носитель, перед стартом ДСА должно быть проверено максимально возможное число систем и устройств аппарата. Для этого существует специальное оборудование на арсеналах и на носителях ДСА (ПЛ, НК, самолетах). Но чтобы это дополнительное оборудование вне аппарата могло проверять ДСА, внутренние системы должны быть спроектированы так, чтобы можно было проверить их функционирование, не разбирая аппарат.
10. Система управления комплексом всех бортовых автоматических систем. Это одна из важнейших автоматических систем ДСА. Эта система координирует, а возможно и объединяет все бортовые автоматические системы с целью более эффективной работы комплекса в целом.
Основные принципы системотехнического подхода к проектированию бортовых автоматических систем. Три уровня системных задач при проектировании бортовых автоматических систем и три уровня описания системы. Многоуровневость моделей системы.
( 2 часа, СРС – 1,5 часа)
Итак, мы перечислили в основном все бортовые автоматические системы ДСА.
Все перечисленные системы вынуждены работать во взаимосвязи в соответствии со схемой действия, принципами работы систем и т.д. Образуется комплекс технических систем, достаточно большой и сложный.
Существует общая теория больших систем. Особо в ней выделяют большие технические системы. Так вот, бортовые комплексы автоматических систем относятся к классу больших технических систем. По результатам этой теории сформирован системно-технический подход к проектированию больших систем.
Ознакомимся с основными принципами системно-технического подхода к проектированию бортовых автоматических систем.
Проектирование структур современных больших технических систем, к которым относятся комплексы бортовых автоматических систем, производится на базе единого системно-технического подхода, включающего в себя:
1) определение общей структуры системы;
2) организацию взаимодействия между подсистемами и элементами (с учетом влияния внешней среды);
3) анализ и синтез алгоритмов функционирования и определение интенсивности информационных потоков;
4) разработку структур подсистем и элементов;
5) оптимизацию структуры и алгоритмов.
Эти 5 пунктов не являются последовательностью проектирования, а включают в себя содержание проектирования – что должно быть сделано.
Укрупнено процесс проектирования проходит в два этапа:
На первом этапе рассматриваются три вопроса:
1) определяется цель создания системы и круг решаемых задач;
2) дается описание действующих на систему факторов;
3) производится выбор показателя или ряда показателей качества (эффективности) системы – выбор критериев качества.
Фактически решение всех этих трех вопросов формирует исходные данные для проектирования системы. Итак, на первом этапе формируются исходные данные.
На следующем (втором) этапе на основании исходных данных, полученных на первом этапе проектирования, производится структурная и схемно-техническая разработка подсистем и элементов системы.
В процессе проектирования (на втором этапе) решают три группы системных задач:
1-я группа – определение взаимодействия управляющей системы с объектом управления, а также внешней средой. Формирование законов управления;
2-я группа – алгоритмизация законов управления и разработка функциональной структуры (функциональной схемы);
3-я группа – выбор технических средств для реализации информационных процессов и разработка структуры комплекса технических средств.
Этим трем группам системо-технических задач соответствуют три уровня описания системы: информационный, функциональный, системо-технический.
Понимание системы возрастает при последовательном переходе от одного уровня описания к другому: чем ниже уровень описания, тем более детальным оно становится; чем выше уровень описания, тем яснее назначение и содержание системы.
При проектировании больших технических систем используют моделирование. С помощью моделирования производится обоснование и предсказание с определенной степенью приближения свойств и характеристик системы. Моделирование является характерной чертой современного уровня проектирования больших технических систем.
Многоуровневому описанию системы соответствует и многоуровневость моделей системы:
А) математическая модель – это математическое описание системы, ее частей, связей;
Б) имитационная модель – это модель процесса действия системы на основе математической модели системы в реальном или масштабируемом времени;
В) полунатурная модель - это когда часть системы описана математически, а часть - существует в натуральном виде,
Г) натурная модель – это реальная модель системы.
Принципы построения бортовых автоматических систем. Алгоритм работы автоматической системы. Датчики входных физических параметров. Носители сигналов. История развития автоматических систем двухсредных аппаратов. Понятие об интегрированной бортовой автоматической системе.
( 2 часа, СРС – 1,5 часа)
Каждая автоматическая система имеет несколько входных параметров и несколько выходных параметров (возможно один). Значение выходного параметра формируется в зависимости от значений входных параметров в текущий момент времени и вообще в зависимости от значений входных параметров за все предшествовавшее время.
Формирование значения выходного параметра строго определено и может быть описано математически. С вопросом формирования значения выходного параметра связано понятие алгоритма.
Определение:
Алгоритмом называется строго установленный порядок операций, по которому формируется значение выходного параметра на основе информации о входных параметрах.
Системы, в которых выходной параметр формируется (вычисляется) на основе значений входных параметров, называются информационными системами. Значения входных и выходных параметров в информационных системах принято называть сигналами.
Автоматические системы ДСА являются информационными системами.
Упрощенно построение конкретной автоматической системы разделяют на два этапа. Отметим, что все это на основе системо-технического подхода.
Первый – это разработка алгоритма работы автоматической системы на основе технических требований к системе.
Второй - это разработка аппаратурной реализации автоматической системы, реализующей алгоритм работы, созданный на первом этапе. По результатам второго этапа возможна коррекция алгоритма работы.
Алгоритм работы автоматической системы определяется не только техническими требованиями к системе, но и возможностями текущего состояния техники и результатами разработки аппаратуры. Алгоритмы могут быть и такие, что реализовать их при современном уровне развития техники невозможно, или реализация будет такова, что использовать ее нецелесообразно. Например, габаритно-весовые характеристики будут слишком велики или недостаточна надежность, велика энергоемкость, велика стоимость и т.д. Таким образом, разработка алгоритма автоматической системы – это выработка компромиссного решения между требованиями и возможностями технической реализации. Для дальнейшего изложения принципа построения бортовых автоматических систем необходимо коротко остановиться на истории развития автоматических систем.
Начнем с понятия входных сигналов.
Входными сигналами в автоматических системах в большинстве случаев являются физические параметры, например, глубина ПА, угол наклона продольной оси относительно горизонта – дифферент (тангаж), механическая деформация при контакте с ДСА с целью или его резкое торможение и т.д. Чтобы оперировать со значениями этих физических параметров, их нужно преобразовать в другие физические величины, так называемые носители сигнала, с которыми можно работать: складывать, вычитать, сравнивать, принимать логические решения. Устройства, преобразующие значения реальных физических параметров в параметры физических величин, являющихся носителями сигналов называются датчиками. Это датчики давлений, датчики углов, датчики угловых скоростей и т.д.
На ранних этапах развития ДСА (ПА) в качестве физических величин (носителей сигналов) чаще использовались механические перемещения. Датчики преобразовывали реальную физическую величину в линейное или угловое перемещение. Датчик давления при помощи мембраны преобразовывал давление (или глубину) в перемещение мембраны и т.д. При помощи рычажных механизмов осуществлялось сложение и вычитание величин. При помощи курковых механизмов осуществлялось сравнение величин, то есть выполнялись релейные функции (дающие на выходе значение 0 или 1). Автоматические системы ПА были механическими. Возможности этих систем в плане сложности выполняемых алгоритмов и точности были весьма ограничены. Однако, во времена механических автоматических систем были созданы алгоритмы работы, которые применяются и сейчас на других носителях сигналов и элементной базе устройств. В качестве примера можно отметить СУ глубиной хода ПА, использующей в законе управления глубину, первую производную глубины и вторую производную глубины; гироскопическую систему управления курсом ПА (прибор Абри). Использовался механический ввод исходных данных по глубине, по курсу, по изменению курса на дистанции хода (шпиндельный ввод). Не следует считать, что использование механических величин в качестве носителей сигналов полностью ушло в прошлое. Это так для сложных алгоритмов работы устройств. Но есть устройства автоматики, где применение механических входных переменных позволяет создать более простые и надежные приборы. Все зависит от конкретного алгоритма работы и его реализации.
С развитием электронной техники значительно возросли возможности реализации сложных алгоритмов работы систем автоматики ДСА. Носителем входных и в значительной мере выходных сигналов стало электрическое напряжение или электрический ток. Датчики входных сигналов стали преобразователями физических величин в электрическое напряжение или ток. Появились достаточно сложные и совершенные по параметрам электронно-механические СУ, СОП, ССН, появились неконтактные взрыватели. Для преобразования информации при реализации алгоритмов стали применяться электронные элементы. Электронная элементная база развивалась в направлении электронные лампы → полупроводниковые дискретные элементы (транзисторы, диоды) → интегральные аналоговые полупроводниковые микросхемы → интегральные цифровые полупроводниковые микросхемы . И в настоящее время происходит дальнейшее и непрерывное увеличение степени интеграции электронных элементов в конструктивной единице – микросхеме. Системы автоматики были аналоговыми. Что это значит – реальной физической величине входного сигнала соответствовала величина напряжения, тока или другого параметра электрического сигнала. К настоящему времени системы бортовой автоматики аналогового типа, выполненные на интегральных микросхемах, все еще занимают значительное место в оборонном комплексе России.
Дальнейшее развитие электронной техники, связанное с увеличением степени интеграции элементов и развитием цифровой техники, привело к цифровому методу обработки информации в наиболее сложных по алгоритмам системах автоматики – СУ, СОП, ССН, неконтактные взрыватели и т.д. Все переменные в системах автоматики представляются в цифровом виде: входные, промежуточные и в значительной мере выходные (за исключением тех сигналов, которые подаются на исполнительные электромеханические устройства). Для преобразования аналоговых электрических сигналов в цифровые и наоборот, цифровых в аналоговые, в устройства входят АЦП (аналого-цифровые преобразователи) и ЦАП (цифро-аналоговые преобразователи). Для проведения вычислений согласно алгоритму работы используется цифровое вычислительное устройство на базе микропроцессоров и других элементов цифровой вычислительной техники.
Итак, мы имеем в ДСА ряд автоматических систем с цифровым методом обработки информации. Большая часть автоматических систем ДСА взаимосвязаны: информация с системы СОП и из навигационной системы должна поступать в систему СУ; из СУ информация должна поступать на систему рулевых приводов и т.д.
Такое построение бортовых автоматических систем как совокупности конструктивно законченных систем, связанных между собой и другими системами ДСА линиями связи, не является наилучшим.
Более предпочтительной является структура, где обработка информации сосредоточена в мощном вычислительном ядре, связанном не с целыми автоматическими системами, а с датчиками автоматических систем и исполнительными элементами – рулевыми машинами, клапанами, пиропатронами, запалами, двигателем и ускорителем, исполнительными механизмами БЧ и т.д.
В аппарате образуется единое информационное устройство, в котором объединены все (или большая часть) бортовых автоматических систем: гидроакустическая (радиолокационная), навигационная система, система управления и стабилизации, система управления исполнительными элементами БЧ, система управления рулевыми приводами, система регистрации и система ввода исходных данных и т.д. Появляется возможность вводить перед стартом программу БЦВМ, меняя ее в зависимости от различных условий применения ЛА и тактических ситуаций. Можно изменять схему действия ЛА в пределах его возможностей, обусловленных конструктивным выполнением.
Значительно расширяются вычислительные возможности комплекса. И если раньше некоторые алгоритмы работы систем автоматики, таких как СОП или навигационная система, были недоступны ввиду большого объема вычислений, то с увеличением производительности БЦВМ эти ограничения все чаще снимаются.
Система бортовой автоматики ЛА, имеющая единое информационное пространство, основанное на высокопроизводительной бортовой цифровой вычислительной машине, называется интегрированной бортовой автоматической системой (ИБАС).
Помимо функциональных преимуществ и возможностей интегрированные системы ИБАС имеют значительные конструктивные преимущества. Это значительное уменьшение весов и габаритов аппаратуры. Это значительное уменьшение весов и габаритов цепей информационной связи между ядром ИБАС с датчиками и исполнительными механизмами – кабельные магистрали. Используются самые различные цепи информационного обмена между БЦВМ и другими блоками. Это - параллельные и последовательные, это – однонаправленные и двунаправленные. Все зависит от конкретного блока и его расстояния от БЦВМ, от объема информации и ее вида. В качестве примера можно указать на высокоэффективный канал межблочного обмена – это мультиплексный канал информационного обмена. Схема его такова:
Рис.4 Есть одна единственная цепь (коаксиальная или симметричная двунаправленная), связывающая все блоки, участвующие в информационном обмене. Каждый из блоков имеет свой специфический адрес (код). Блок, желающий получить или передать информацию, в момент, когда линия связи свободна, передает адрес блока, от которого или к которому нужно передать порцию информации, и свой адрес. Блок, к которому обращались, подтверждает способность передать или принять информацию. После этого начинается обмен (передача или прием). При достаточно большой скорости передачи информации по одному мультиплексному каналу могут работать много блоков аппаратуры.
Вообще алгоритмы информационного обмена стандартизованы как на внутри российском уровне, так и на международном.



 . И если рулевой привод с системой автоматики правильно спроектированы, то руль будет отклоняться по графику 1. Если система автоматики отсутствует, то руль переложится до упора, а не на δ2 . Если параметры системы автоматики выбраны не очень правильно, то руль может отклоняться либо по 3, либо по 4. Иногда, когда говорят о рулевом приводе, предполагают, что система автоматики рулевого привода уже входит в него.
. И если рулевой привод с системой автоматики правильно спроектированы, то руль будет отклоняться по графику 1. Если система автоматики отсутствует, то руль переложится до упора, а не на δ2 . Если параметры системы автоматики выбраны не очень правильно, то руль может отклоняться либо по 3, либо по 4. Иногда, когда говорят о рулевом приводе, предполагают, что система автоматики рулевого привода уже входит в него.