В адаптивных генетических алгоритмах изменяются параметры ГА, прежде всего, вероятности кроссинговера и мутации Рси Рт .
Для оптимизации, особенно мультимодальных функций, наиболее существенными являются две характеристики ГА:
- способность сходиться к оптимуму (локальному или глобальному) после нахождения области, содержащей этот оптимум;
- способность находить новые области в пространстве решений в поисках глобального оптимума.
Баланс между этими характеристиками ГА определяется значениями вероятности Рс и Рти типом используемых генетических операторов (прежде всего кроссинговера). Увеличение значений Pcи Pmведет к расширению пространства поиска.
Обычно используют следующие значения вероятностей Рс[0.5;1] и
Pm. Далее мы рассмотрим другой подход, который использует различные значения Рс и Ртв зависимости от значения ЦФ текущих особей. Для мультимодальных функций существует серьезная проблема преждевременной сходимости к локальным экстремумам.
Чтобы изменять Рс и Ртадаптивно, с целью предотвращения преждевременной сходимости к локальному экстремуму, надо научиться идентифицировать ситуации, когда ГА сходится к оптимуму. Рассмотрим этот подход на примере поиска максимума для мультимодальной функции (которая имеет несколько экстремумов), которая показана на рисунке.
Один из возможных способов обнаружения сходимости -наблюдение разности среднего и максимального значения целевой функции по популяции .Обычно эта разность меньше для популяции, которая сходится к оптимуму, чем для популяции, «разбросанной» по пространству поиска решений. Будем использовать разность в качестве основного признака сходимости к оптимуму, причем не обязательно глобальному.
Поскольку вероятности Рси Ртдолжны увеличиваться при преждевременной сходимости к локальному оптимуму (чтобы «выпрыгнуть из ловушки» локального экстремума), то значение
должны изменяться обратно пропорционально разности :
Pc = , Pm = .
Отметим, что как для хороших решений с высокими значениями целевой функции, так и для плохих, используются одни и те же величины
Рси Рт. Это не рационально, так как когда популяция сходится к глобальному или локальному оптимуму, то Рси Ртувеличиваются, что ведет к разрушению близких к оптимуму решений. В результате популяция может не сойтись к глобальному оптимуму. Таким образом, мы избежали ловушки локального экстремума ценой снижения характеристик ГА по поиску глобальных экстремумов.
Чтобы решить эту проблему, нужно сохранить хорошие решения текущей популяции. Это можно сделать, полагая низкие значения
вероятности Рси Ртдля особей с высоким значением ЦФ и высокие значения Рси Ртдля плохих особей с низкими значениями ЦФ. Тогда лучшие решения будут способствовать сходимости, а худшие - предотвращать ГА от «ловушек» локальных экстремумов. Таким образом, значение Рси Ртдолжны зависеть не только от разности , но еще и от значений ЦФ конкретных особей. Чем ближе значение функции к максимальному, тем меньше должно быть значение Рси Рт :
, k1 ≤ 1,
, k2 ≤ 1,
где - лучшее значение целевой функции у двух родителей.
Положим Pc=Pm=0 для решений, имеющих максимальное значение ЦФ и
Pc = k1,
Pm= k2, .
Отметим, что для плохих решений значения вероятностей
Рси Ртв соответствии с формулой могут быть больше 1, что некорректно. Поэтому для плохих решений примем:
Pc = k3,
Pm= k4, .
В итоге получим:
Pc =
k3, иначе
Pm=
k4, иначе
k1 = k3 = 1;
k2 = k4 = 0.5.
Лучшие решения при этом сохраняются и переходят в следующее поколение. Этот факт может привести к чрезмерному росту популяции, что чревато преждевременной сходимостью. Поэтому иногда дополнительно вводится одна (default) мутация (с вероятностью Pd - 0.005) для всех особей популяции.
Существуют и более строгие адаптивные ГА, где вероятности Рси Ртвычисляются аналитически, но они, как правило, сильно привязаны к конкретным задачам. Достаточно эффективным средством адаптации является использование «нечетких контроллеров» в виде, например, системы продукций в нечеткой логике.
АСОТП – автоматическая система обнаружения и тушения пожара.
АСНП – автоматическое считывание номера поезда.
АТЗ - аварийно-тренировочные занятия.
БВ – быстродействующий выключатель.
БС – бортовая сеть.
БУП – блок управления поездом.
БУВ – блок управления вагоном.
БУТП – блок управления тяговым приводом.
БКЦУ – блок коммутации цепей управления.
БКР – блок контроллеров реверса.
БИ – блок индикации.
БПЗ – блок противоюзовой защиты.
БУСТ – блок управления стояночным тормозом.
БЭПП – блок электропневматических приборов.
БУЦИК – блок управления цифровым информационным комплексом.
БЭС – блок экстренной связи.
ВБ – выключатель батареи.
ВО – вагонное оборудование.
ВТБ – вентиль тормоза безопасности.
ГГС – громкоговорящая связь.
ДПБ -датчик перегрева букс.
ДЦХ – поездной диспетчер.
ДСП – дежурный по станции.
ДУКС – дискретное устройство контроля скольжения.
ДД – датчик давления.
ИПП – источник питания программируемый.
КМ – контроллер машиниста.
КРО – контроллер реверса основной.
КРР – контроллер реверса резервный.
КТР – кнопка тормоза резервного.
КАХ – кнопка аварийного хода.
КС – контактная сеть.
КРМ – кран машиниста.
КП – колёсная пара.
КЗ – короткое замыкание.
МПУ – маневровый пульт управления.
ММ – монитор машиниста.
МВ – монитор видеообзора.
МК – мотор компрессор.
НМ – напорная магистраль.
ОПУ – основной пульт управления.
ПБ – педаль бдительности.
ППЗ – панель поездной защиты.
ПВЗ – панель вагонной защиты.
ПВС – пункт восстановительных средств.
ПВУ – повагонное управление.
ПНМ – пульт наборный многофункциональный.
РВ – реверс.
РТЭ - резервный тормоз экстренный.
РВТБ – резервный вентиль тормоза безопасности.
РВС – радиовещательная станция.
РТП – рычажно-тормозная передача.
СТ – стояночный тормоз.
САУ – система автоматического управления.
Сф – конденсатор сетевого фильтра.
СД – сигнализатор давления.
ТЭ – тормоз экстренный.
ТМ – тормозная магистраль.
ТКПР – токоприёмник.
ТЧМ – машинист-инструктор.
ТЦ – тормозной цилиндр.
УКОС – устройство контроля ограничения скорости.
ФКМ – функциональная клавиатура машиниста.
ЦБКИ – центральный блок контроля информации.
ЭПТ – электропневматический тормоз.
Введение.
Конспект состоит из двух глав. В первой главе изложен порядок приёмки, сдачи состава в электродепо и на линии. Действия при нахождении в ПТО электродепо и на линии. Порядок работы на линии. Порядок маневровой работы на парковых путях электродепо и на линии. Порядок мойки состава. Действия машинистов при производстве сцепа вспомогательного поезда с неисправным.
Во второй главе определён общий порядок действий при возникновении неисправностей электроподвижного состава, порядок действий при пожаре, задымлении, загорании, при срабатывании КГУ, а также других ситуациях, возникающих в процессе работы.
Конспект может успешно изучаться при условии знаний Правил технической эксплуатации метрополитенов Российской Федерации, Инструкции по движению поездов и маневровой работе, Инструкции по сигнализации, механического, пневматического и электрического оборудования состава, охраны труда.
Конспект является пособием при обучении профессии "машинист электропоезда" метрополитена.
В каждом электродепо разработаны Местные инструкции, как о порядке приёмки, сдачи состава.., так и порядке выхода из случаев неисправностей.

 [0.5;1] и
[0.5;1] и . Далее мы рассмотрим другой подход, который использует различные значения Рс и Рт в зависимости от значения ЦФ текущих особей. Для мультимодальных функций существует серьезная проблема преждевременной сходимости к локальным экстремумам.
. Далее мы рассмотрим другой подход, который использует различные значения Рс и Рт в зависимости от значения ЦФ текущих особей. Для мультимодальных функций существует серьезная проблема преждевременной сходимости к локальным экстремумам.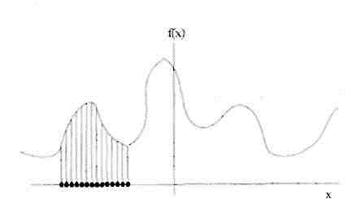
 .Обычно эта разность меньше для популяции, которая сходится к оптимуму, чем для популяции, «разбросанной» по пространству поиска решений. Будем использовать разность
.Обычно эта разность меньше для популяции, которая сходится к оптимуму, чем для популяции, «разбросанной» по пространству поиска решений. Будем использовать разность  , Pm =
, Pm =  .
. , k1 ≤ 1,
, k1 ≤ 1, , k2 ≤ 1,
, k2 ≤ 1, - лучшее значение целевой функции у двух родителей.
- лучшее значение целевой функции у двух родителей.
 значения вероятностей
значения вероятностей