Прианализе этого уравнения не трудно сделать вывод, что возможно 3 способа регулирования:
1. реостатное регулирование()
2. регулирование магнитным потоком
3. регулирование напряжением на зажимах якоря
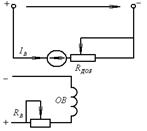
Схема реостатного регулирования ДПТ с НВ аналогична схеме реостатного пуска рассмотренного в предыдущем курсе. Однако при этом реостаты вводимые в цепь якоря по сравнению с пусковыми реостата должна быть рассчитаны на более длительную работу.
Рис.94 Схема реостатного регулирования ДПТ с НВ
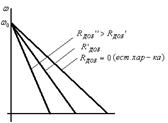
При изменении добавочного сопротивления вводимого в цепь якоря регулировочные характеристики будут иметь вид:
Рис.95 Регулировочные характеристики ДПТ с НВ при реостатном регулировании
Показатели качества регулирования:
1. направление однозонное «вниз»
2. стабильная низкая
3. плавность – зависит от числа ступеней, но в целом - низкая
4. допустимая нагрузка на валу. Как уже говорилось, в процессе регулирования, должно быть выполнено условие использования двигателя по нагреву, что достигается поддержанием тока якоря равным номинальному. Так как при реостатном регулировании поток постоянен, то . т.е. реостатное регулирование относится к регулированию скорости при постоянном моменте.
4. Энергетические показатели. При реостатном регулировании
мощность потребляемая из питающей сети
Таким образом, потери мощности в двигателе при реостатном регулировании можно представить как произведение мощности на относительный перепад скорости. Отсюда видно, что при уменьшении угловой скорости в 2 раза потери мощности будет составлять 50%, т.к. реостатное регулирование энергически не эффективно.
Учитывая очень низкие показатели электрические показатели и эффективность составит:
Определим величину добавочного сопротивления. которое необходимо ввести в цепь якоря для того чтобы уменьшить угловую скорость вращения:
Существуют способы, с помощью которых можно улучшить некоторые показатели реостатного регулирования.
Например: плавность. С этой целью используют так называемое импульсно-параметрическое регулирование.
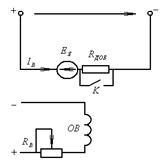
Рис. 96 Схема при импульсно-параметрическом регулировании
Сущность заключается в том, что в цепь якоря вводится одноступенчатое добавочное сопротивление, которое с высокой частотой, примерно р 600-800Гц, попеременно вводиться в цепь якоря (ключ к находится в разомкнутом состоянии) и выводится (). При этом - замкнутого состояния ключа, - время разомкнутого состояния.
- представляет из себя силовой ключ (транзистор или тиристор). При этом величина равная - называется скважность.
При этом изменяется соотношение и ,но . При изменении изменяется ,
, а уравнение механической характеристики, принимает вид:
Изменяя можно регулировать скорость вращения с высокой степенью плавности.
2. Регулирование скорости изменением магнитного потока.
Этот способ регулирования реализуется с помощью изменения тока возбуждения. Учитывая то, что цепь возбуждения является слаботочной, то изменение тока можно производить плавно:
Из этих уравнений видно, что при изменении потока, изменяется (скорость идеализированного х.х.):
иперепад скоростей .
При этом семейство характеристик будет следующего вида:
а) б)
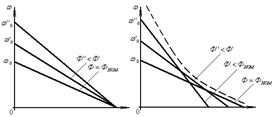
Рис. 97 Электромеханическая (а) и механическая (б) характеристики при изменении магнитного потока
Следует отметить то, что возрастание потока относительно номинального возможно только в очень небольших пределах в силу того что магнитный поток ДПТ находится в состоянии близком к насыщению. Еще следует отметить такую особенность, что в области меньших моментов на валу двигателя уменьшение потока, приводит к увеличению угловой скорости и в области больших моментов на валу двигателя приводит к уменьшению .
Если просуммировать эти характеристики то получим гиперболическую кривую.
Показатели качества регулирования:
1) плавность – высокая;
2) энергетически эффективен, т.к. изменение тока возбуждения не приводит к большим потерям мощности;
3) направление регулирования: теоретическая двузонная, но практически - однозонное «вверх»;
4) стабильность низкая. Жесткость характеристик при уменьшении, поток резко уменьшается;
5) допустимая нагрузка на валу: .
Так как поток изменяется, то изменяется момент.
Рассмотрим изменяется ли мощность двигателя при изменении потока.
Таким образом регулирование скорости изменяем магнитного потока относится к регулированию с постоянной мощности;

 (
( )
)

 . т.е. реостатное регулирование относится к регулированию скорости при постоянном моменте.
. т.е. реостатное регулирование относится к регулированию скорости при постоянном моменте.
 мощность потребляемая из питающей сети
мощность потребляемая из питающей сети 



 ). При этом
). При этом  - замкнутого состояния ключа,
- замкнутого состояния ключа,  - время разомкнутого состояния.
- время разомкнутого состояния. - представляет из себя силовой ключ (транзистор или тиристор). При этом величина равная
- представляет из себя силовой ключ (транзистор или тиристор). При этом величина равная  - называется скважность.
- называется скважность. и
и  ,но
,но  . При изменении
. При изменении  изменяется
изменяется  ,
, , а уравнение механической характеристики, принимает вид:
, а уравнение механической характеристики, принимает вид:
 можно регулировать скорость вращения с высокой степенью плавности.
можно регулировать скорость вращения с высокой степенью плавности. .
.
 (скорость идеализированного х.х.):
(скорость идеализированного х.х.): иперепад скоростей
иперепад скоростей 
 .
.
 .
.
 .
.


 .
.