Из сказанного следует, что работа ПЛК при решении логической задачи связана с повторяющейся последовательной сменой фаз. Структура одного полного цикла смены фаз может иметь четыре модификации.
В первой модификации в начале цикла работы ПЛК производится обработка всех входов (фаза 1), далее решаются все логические уравнения (фаза 2), а уже затем соответствующим образом возбуждаются все выходы ПЛК (фаза 3).
Во второй модификации входы обрабатываются так же, как и в первом случае; однако выходы возбуждаются по мере решения отдельного логического уравнения.
В третьей модификации базовой является фаза решения логического уравнения; при этом считываются те входы, которые этому уравнению необходимы, и формируются те выходы, которые являются результатом решения уравнения.
В четвертой модификации существует цикл сканирования входов на постоянной частоте вне зависимости от продолжительности вычислительной фазы и фазы возбуждения выходов.
Таким образом, ПЛК в течение цикла своей работы обменивается информацией с внешней средой и производит обработку данных, предписанную программой электроавтоматики. Чем выше вычислительная мощность ПЛК, тем короче цикл его работы.
При решении логической задачи содержанием вычислительного процесса является решение логических уравнений типа у=F(х), которыми описывается алгоритм управления объектом, где у – выходная функция; х – аргумент, или входная функция; F – логический оператор. К выходным функциям относятся выходы, управляющие двигателями объекта управления, внутренние функции (внутренние переменные), не имеющие реального выхода и ограничивающие область своего действия самой программой, таймеры, счетчики. К входным функциям относятся собственно входы, возбуждаемые осведомительными сигналами; внутренние функции, таймеры, счетчики. В качестве входных функций могут выступать и значения выходных сигналов.
При разработке ПЛК приходится учитывать следующие особенности объекта управления:
· число входов и выходов у объектов управления может варьироваться от нескольких десятков до многих сотен;
· обычно требуются силовые выходы, способные без дополнительного усиления коммутировать реальные устройства электроавтоматики (электромагниты, двигатели, реле);
· входные и выходные устройства электроавтоматики могут принадлежать цепям как постоянного так и переменного тока.
В этой связи программируемые контроллеры строят как модульные аппараты с широкой номенклатурой взаимозаменяемых модулей, свободно устанавливаемых в едином каркасе, несущем общую магистраль системы. Обычно ПЛК имеет фиксированную общую сумму входов-выходов (например, 16, 64, 128, 256, 512) со свободным перераспределением в пределах общей суммы. Перераспределение осуществляют путем установки и изъятия соответствующих модулей.
Модуль вычислителя имеет три режима работы: ПРОГРАММИРОВАНИЕ, ЕДИНИЧНЫЙ ЦИКЛ, АВТОМАТ. В первом режиме модуль подключен к внешнему программирующему устройству (программатору) для ввода и коррекции пользовательской программы. Режим ЕДИНИЧНЫЙ ЦИКЛ предназначен для однократного воспроизведения пользовательской программы с целью ее контроля и отладки. В режиме АВТОМАТ модуль непрерывно обрабатывает пользовательскую программу, при этом осуществляется непосредственное управление объектом.
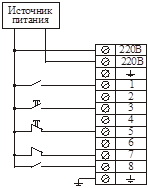
На рис. 2 представлены в качестве примеров схемы внешних соединений модулей выходных сигналов постоянного тока (рис. 2, а) и входных сигналов переменного тока (рис. 2, б).
а)
б)
Модуль выходов на рис. 2, а служит для выдачи под управлением вычислителя восьми дискретных сигналов напряжением 24 В, каждый из которых предназначен для управления своим исполнительным устройством на объекте. Выходные сигналы обычно гальванически изолированы от модуля вычислителя с помощью оптронной развязки или реле. Каждый выход может быть защищен предохранителем от короткого замыкания в нагрузке, сгорание предохранителя сопровождается зажиганием соответствующего светодиода. Все индуктивные исполнительные устройства на объекте должны быть шунтированы диодами для устранения выбросом обратного напряжения, возникающих помех при их коммутации. В качестве источника питания выступает отдельный внешний модуль.
Модуль входов служит для преобразования дискретного сигнала переменного тока в сигнал, с которым работает модуль вычислителя. Посредством модуля входов в ПЛК вводятся дискретные сигналы, получаемые от переключателей, контактов реле и других дискретных датчиков объекта. Модуль на рис. 2, б имеет восемь входов.
Входной сигнал переменного тока проходит через выпрямитель и поступает на оптроны, обеспечивают гальваническую развязку внутренней схемы ПЛК и объекта управления. Сформированные восемь входных сигналов поступают для обработки в модуль вычислителя.
Современные ПЛК помимо логической задачи способны выполнять и некоторые другие задачи:
· управление непрерывными процессами и системами автоматического регулирования (аналоговая задача);
· независимое неинтерполируемое управление следящими приводами (геометрическая задача);
· распределенное управление сложными объектами (коммуникационная задача).
Аналоговая задача предполагает наличие у ПЛК модулей аналого-цифровых и цифроаналоговых преобразователей. Обычно средствами ПЛК решают задачи ПИД-управления.
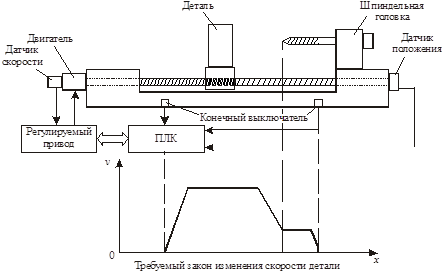
Геометрическая задача ПЛК может быть проиллюстрирована управлением скоростью v перемещения детали в функции пути х при сверлении отверстия на агрегатном станке (рис. 3). Позиционное регулирование осуществляется с помощью следящего привода, внешний контур которого замкнут через ПЛК обратной связью по положению. Помимо программно управляемого изменения скорости имеется возможность дополнительно изменять скорость перемещения или останавливать привод по командам конечных выключателей. Нередко ПЛК могут одновременно управлять многими следящими приводами. Однако межкоординатная связь отдельных приводов отсутствует, поскольку ПЛК не рассчитан на организацию интерполяции.
Коммуникационная задача ПЛК должна решаться во всех случаях, когда ПЛК входит в сеть (однородную или неоднородную) вычислительно-управляющих средств. При этом возникает необходимость в оперативном распределении управляющих функций, координации и синхронизации действий компонентов сети, передаче программ, файлов и информационных сообщений и т. д.
Существуют три основных способа интеграции ПЛК в распределенный комплекс:
· путем связывания отдельных ПЛК через дискретные или цифровые входы-выходы;
· путем объединения одного или нескольких ПЛК о центральной ЭВМ по стандартным каналам связи через интерфейсы типа RS232; RS422;
· путем организации локальной вычислительно-управляющей сети.
Сопряжение двух ПЛК по дискретным входам-выходам при управлении гибким производственным модулем показано на рис. 4. ПЛК1 предназначен для управления станком (например, токарным гидрокопировальным автоматом). ПЛК2 ориентирован на управление портальным роботом и конвейером-накопителем. Сигналы от органов управления (кнопок, переключателей и т. п.) и контроля (конечных выключателей, реле давления и т. п.) поступают на входы обоих ПЛК. Управляющие сигналы с выходов ПЛК поступают на исполнительные органы. Сигналы высшего приоритета, например ОБЩИЙ СТОП от пульта управления, поступают непосредственно в силовую аппаратуру, минуя ПЛК. Сигналы обмена координируют взаимодействие механизмов станка и конвейерно-накопительной системы.
Рассмотренный способ имеет существенные ограничения. Во-первых, обмен возможен только на уровне логической информации. Во-вторых, коммуникационная задача даже в самых простых случаях поглощает большое число входов-выходов ПЛК, снижая тем самым их управляющие возможности. При возрастании общего числа ПЛК подобный способ вообще теряет смысл.
Возможность объединения нескольких ПЛК с ЭВМ по стандартным каналам связи через интерфейс RS232 или RS422 подкупает своей простотой и (как правило) наличием готовых разработанных аппаратных средств. Подобная интеграция ПЛК относится к типу «ведущий–ведомый» (master–slave), причем роль ведущего отводится обычно центральной ЭВМ. Ведомые ПЛК не могут непосредственно взаимодействовать между собой и быть инициаторами сеансов связи с ЭВМ. Физическим каналом связи (для передачи сигналов в последовательном коде) служит двужильный кабель о экраном.
Канал связи ПЛК с ЭВМ позволяет выполнять по инициативе ЭВМ следующие операции: следить за состоянием входов-выходов любого ПЛК, сбрасывать и устанавливать входы-выходы ПЛК, копировать программу ПЛК, передавать программу для ПЛК, считывать и посылать файлы данных. Любые сообщения, посылаемые ЭВМ, являются командами, а любые сообщения ПЛК – ответами.
Интеграция по типу «ведущий–ведомый» имеет тот недостаток, что при отказе центрального вычислителя взаимодействие остальных устройств полностью разрушается и они становятся независимыми системами управления. Кроме того, при объединении ПЛК через стандартный интерфейс протоколы информационного обмена должны создаваться на уровне специализированных прикладных пользовательских программ, что вносит дополнительные сложности в процедуру программирования ПЛК.
В этом смысле выгодно отличается вариант интеграции ПЛК в рамках контроллерной локальной вычислительно-управляющей сети. К достоинствам этого варианта можно отнести: свободную связь «любой–с любым», простое включение в сеть программатора (программатор одного ПЛК может служить и всем другим), гибкую организацию сетевой структуры по типу «временный ведущий» (floating master), когда центральные функции могут быть переданы другому абоненту сети. Физическим каналом связи (для передачи сигналов в последовательном коде) могут служить витая пара, коаксиальный кабель, оптоволоконный кабель.
В настоящее время наметилась тенденция программной реализации управления электроавтоматикой станков в рамках общего программного обеспечения систем ЧПУ. Это позволит обойтись без привлечения дополнительной аппаратуры и системного программного обеспечения ПЛК, являющихся неотъемлемой частью практически любой современной системы ЧПУ.
Подобные программные системы управления электроавтоматикой получили наименование виртуальных контроллеров SoftPLC (PLS – programming logical controller). Указанный подход позволяет снизить стоимость системы управления при одновременном получении ряда преимуществ, в том числе:
· упрощение общего программного обеспечения;
· уменьшение ошибок системного программирования;
· возможность отладки управляющих программ электроавтоматики в рамках самой системы ЧПУ;
· гибкость конфигурирования электроавтоматики;
· возможность использования различных коммерческих библиотек.
Реализация математического обеспечения виртуального контроллера применительно к станкам с системами ЧПУ типа PCNC предполагает объектно-ориентированный подход, характерный для современного программирования.
В основе технологии создания программного обеспечения электроавтоматики лежат обычные для объектно-ориентированного программирования понятия класса и объекта. При этом класс описывает тип оборудования, а объект – конкретный экземпляр. Таким образом, при объявлении класса, согласно принципу инкапсуляции, создаются шаблоны структур данных и методы, которые будут работать с этими данными. В объекте класса по шаблону выстраиваются конкретные данные и приводится ссылка на обслуживающий их процесс.
При появлении нового типа оборудования, благодаря механизму наследования, разработчик не нуждается в том, чтобы заново разрабатывать новый класс – достаточно выбрать наиболее близкий и реализовать отличия в новом классе. Тем самым обеспечивается простота модификаций, сокращаются затраты времени на разработку, снижается общая стоимость разработки.
Наиболее важен тот факт, что объектный подход позволяет создавать хорошо структурированные сложные системы управления электроавтоматикой. Основные преимущества, приобретаемые при этом, состоят в следующем:
· повышается уровень унификации разработки; для повторного использования пригодны не только управляющие программы, но и проекты в целом, что служит хорошей основой для построения среды разработки. Снижаются затраты времени и средств на создание нового проекта;
· возникает возможность повторного использования собственных функциональных модулей и готовых модулей других разработчиков, что делает систему управления открытой. Уменьшается вероятность ошибок при разработке сложных систем, увеличивается уверенность в правильности принимаемых решений.
Все эти достоинства обеспечиваются благодаря лежащим в основе объектно-ориентированной технологии принципам наследования, инкапсуляции и полиморфизма.
В системе ЧПУ виртуальный контроллер работает в среде операционной системы Windows с расширением реального времени RTX фирмы VentureCom.