Очередной фазой решения геометрической задачи является управление следящими приводами подачи. Привод подач – один из основных узлов, определяющих производительность и точность станка с ЧПУ. Поскольку УЧПУ практически безынерционно формирует сигналы управления приводом, обеспечивающие движение по заданной траектории или позиционирование в заданной координате, большое значение приобретает совершенствование параметров исполнительного двигателя и схемы управления им с учетом особенностей кинематической цепи привода.
По мере совершенствования в УЧПУ увеличения жесткости и точности узлов станка повышаются требования к быстродействию и точности привода подач: скорость быстрых перемещений в современных многоцелевых станках доведена до десятков м/мин, а дискретность перемещений – до 1 мкм.
Механическая часть привода подачи состоит из следующих элементов (рис. 1): двигатель, шарико-винтовая передача, подшипники и соединительный элемент, в качестве которого может использоваться, например, сильфонная муфта, или, если требуется увеличить крутящий момент двигателя, зубчатый или ременной редуктор.
Рис. 1. Механическая часть привода подачи
Каждый из этих элементов может быть выполнен с погрешностями изготовления (отклонения от прямолинейности, погрешности шага винта и т.п.). Также погрешности возникают во время сборки (несоосность соединяемых элементов, люфты (зазоры) в соединениях и т.п.). Все эти погрешности приводят к снижению точности перемещения исполнительного узла привода подачи и, соответственно, к снижению точности обрабатываемой детали. Использование системы управления позволяет «учесть» возникающие погрешности и компенсировать их значения.
Рассмотрим несколько типовых погрешностей, возникающих в механизмах приводов подачи.
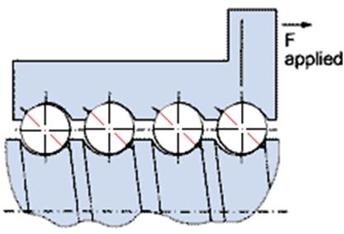
Один из самых распространенных видов погрешностей это зазоры или люфты в передаче. Высокоточные ШВП имеют три класса преднатяга:
– люфтовой (без преднатяга);
Рис. 2. ШВП без преднатяга
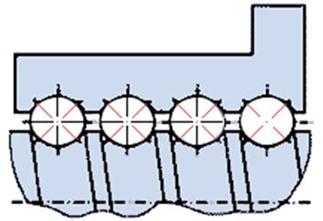
– с преднатягом (незначительный преднатяг по четырем точкам контакта);
Рис. 3. Преднатяг с четырьмя точками контакта
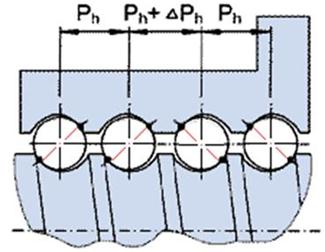
– с прецизионным преднатягом (преднатяг с двумя точками контакта).
Рис. 4. Прецизионный преднатяг с двумя точками контакта
Преднатяг – это внутренняя сила между гайкой и винтом, которая устраняет свободный осевой и радиальный люфт. Он обеспечивает повторяемость перемещений и повышенную жесткость системы. Преднатяг достигается либо с использованием двух гаек и натяжением их по отдельности, либо изменением длины окружности в одной отдельной гайке. При прецизионном преднатяге люфт между гайкой и винтом отсутствует.
Преднатяг составляет порядка 10% от величины динамической нагрузки. Обычно используются в приводах подачи, где требуется повторяемость и высокая жесткость, обеспечивающая перемещение больших нагрузок с минимальными отклонениями.
С незначительным преднатягом по четырем точкам контакта размер шариков несколько больше, чем размер канавок, что обеспечивает появление четырех точек контакта. Люфт между гайкой и винтом отсутствует. Преднатяг составляет порядка 5% от величины динамической нагрузки. Применяется главным образом в приводах, где необходима повторяемость результатов.
В ШВП без преднатяга размер шариков меньше канавки, следовательно, появляется зазор между гайкой и винтом. Между винтом и гайкой возможен осевой люфт, что неблагоприятно сказывается на повторяемости. Нельзя контролировать момент сопротивления. Точность хода незначительна.
Наличие зазора в шарико-винтовой передаче приводит к тому, что в начале движения будет «мертвый» ход, до того как этот зазор будет выбран. Ситуация усугубляется тогда, когда необходимо часто менять направление перемещения по оси. В этом случае «мертвый» ход будет возникать каждый раз при смене направления перемещения вдоль оси. Поэтому очень распространенной является практика «оптимизации» перемещений по оси, когда подход к точке стараются выполнять всегда только с одной стороны.
Любые винтовые пары имеют погрешность шага, которая заключается в неравномерности шага винта от витка к витку. В итоге, наличие погрешности шага винта приводит к погрешности позиционирования. Для решения задачи компенсации данной погрешности применяют специальные таблицы погрешностей. При помощи высокоточного измерителя положения, например, лазерного интерферометра производится замер положения исполнительного органа станка через определенные расстояния. Ошибки в позиционировании, полученные при замере, заносятся в таблицу в памяти системы ЧПУ. Во время отработки команд система ЧПУ читает из таблицы значение компенсации, соответствующее текущей позиции исполнительного органа, и добавляет его к необходимому перемещению. Для промежуточных точек используется значение погрешности, полученное методом интерполяции между двумя ближайшими точками измерений. Для большей точности может применяться двунаправленная компенсация, когда значения погрешностей замеряются интерферометром при перемещении оси как в одном, так и в другом направлении и компенсируются также в разных направлениях. Точность позиционирования, обеспечиваемая системой ЧПУ, зависит от количества точек на оси, для которых замеряется значения погрешности и от длины оси. В современных системах ЧПУ может быть занесено в память несколько сотен точек на каждую ось.
В процессе изготовления любые направляющие будут иметь отклонения от прямолинейности, что будет приводить в процессе работы станка к перемещению по нескольким осям (двум) при заданном перемещении вдоль одной оси. Для компенсации данной погрешности при перемещении вдоль оси с определенной периодичностью при помощи индикаторов замеряется отклонение по двум другим осям. По измеренным отклонениям заполняется таблица в памяти системы ЧПУ. Во время отработки команд система ЧПУ считывает значение компенсации и, в соответствии с ним, добавляет перемещение по двум другим осям.
Наиболее распространенные системы числового программного управления компенсируют погрешности различных типов: компенсация погрешности шага ходового винта, компенсация люфтов, компенсация отклонений от прямолинейности, трехмерная компенсация положения инструмента, компенсация тепловых деформаций. Сравнительные данные о возможных компенсациях погрешностей для различных производителей СЧПУ представлены в таблице 1.