Областью решения линейного неравенства с двумя переменными
(15).
является полуплоскость. Для того чтобы определить, какая из двух полуплоскостей соответствует этому неравенству, нужно привести его к виду или . Тогда искомая полуплоскость в первом случае расположена выше прямой , во втором - ниже нее. Если , то неравенство (15) имеет вид ; в этом случае получим либо - правую полуплоскость, либо - левую полуплоскость.
Областью решений системы неравенств является пересечение конечного числа полуплоскостей, описываемых каждым отдельным неравенством. Это пересечение представляет собой многоугольную область . Она может быть как ограниченной, так и неограниченной и даже пустой (если система неравенств противоречива).
Область решений обладает важным свойством выпуклости. Область называется выпуклой, если произвольные две ее точки можно соединить отрезком, целиком принадлежащим данной области. На рисунке показаны выпуклая область и невыпуклая, область . В области две ее произвольные точки и можно соединить отрезком, все точки которого принадлежат области . В области можно выбрать такие две ее точки и , что не все точки отрезка принадлежат области .
Опорной прямой называется прямая, которая имеет с областью по крайней мере одну общую точку, при этом вся область расположена по одну сторону от этой прямой. На рисунке показаны две опорные прямые и , т.е. в данном случае опорные прямые проходят соответственно через вершину многоугольника и через одну из его сторон.
Аналогично можно дать геометрическую интерпретацию системы неравенств с тремя переменными. В этом случае каждое неравенство описывает полупространство, а вся система - пересечение полупространств, т.е. многогранник, который также обладает свойством выпуклости. Здесь опорная плоскость проходит через вершину, ребро или грань многогранной области.
Основываясь на введенных понятиях, рассмотрим геометрический метод решения задачи линейного программирования. Пусть заданы линейная целевая функция двух независимых переменных, а также некоторая совместная система линейных неравенств, описывающих область решений . Требуется среди допустимых решений найти такое, при котором линейная целевая функция принимает наименьшее значение.
Положим функцию равной некоторому постоянному значению : . Это значение достигается в точках прямой, удовлетворяющих уравнению
(16).
При параллельном переносе этой прямой в положительном направлении вектора нормали линейная функция будет возрастать, а при переносе прямой в противоположном направлении - убывать.
Предположим, что прямая записанная в виде (16), при параллельном переносе в положительном направлении вектора первый раз встретится с областью допустимых решений в некоторой ее вершине, при этом значение целевой функции равно , и прямая становится опорной. Тогда значение будет минимальным, поскольку дальнейшее движение прямой в том же направлении приведет к увеличению значения .
Если в задаче оптимизации нас интересует максимальное значение целевой функции, то параллельный перенос прямой (16) осуществляется в направлении, противоположном , пока она не станет опорной. Тогда вершина многоугольника , через которую проходит опорная прямая, будет соответствовать максимуму функции . При дальнейшем переносе прямой целевая функция будет убывать.
Таким образом, оптимизация линейной целевой функции на многоугольнике допустимых решений происходит в точках пересечения этого многоугольника с опорными прямыми, соответствующими данной целевой функции. При этом пересечение может быть в одной точке (в вершине многоугольника) либо в бесконечном множестве точек (на ребре многоугольника).
В заключение вернемся к рассмотренной ранее транспортной задаче . На рисунке изображен многоугольник допустимых решений. Он получен как пересечение полуплоскостей, описываемых неравенствами (12). Опорная прямая соответствует уравнению (14) при . Точка пересечения опорной прямой с многоугольником решений дает минимум целевой функции.
При дальнейшим параллельном переносе этой прямой вверх можем попасть в точку (опорная прямая ) и получить максимум целевой функции.

 (15).
(15). или
или  . Тогда искомая полуплоскость в первом случае расположена выше прямой
. Тогда искомая полуплоскость в первом случае расположена выше прямой  , во втором - ниже нее. Если
, во втором - ниже нее. Если  , то неравенство (15) имеет вид
, то неравенство (15) имеет вид  ; в этом случае получим либо
; в этом случае получим либо  - правую полуплоскость, либо
- правую полуплоскость, либо  - левую полуплоскость.
- левую полуплоскость.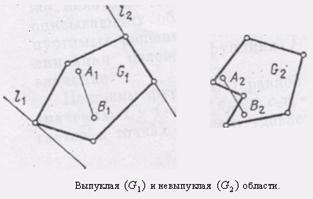
 . Она может быть как ограниченной, так и неограниченной и даже пустой (если система неравенств противоречива).
. Она может быть как ограниченной, так и неограниченной и даже пустой (если система неравенств противоречива). и невыпуклая, область
и невыпуклая, область  . В области
. В области  и
и  можно соединить отрезком, все точки которого принадлежат области
можно соединить отрезком, все точки которого принадлежат области  и
и  , что не все точки отрезка
, что не все точки отрезка  принадлежат области
принадлежат области  и
и  , т.е. в данном случае опорные прямые проходят соответственно через вершину многоугольника и через одну из его сторон.
, т.е. в данном случае опорные прямые проходят соответственно через вершину многоугольника и через одну из его сторон. двух независимых переменных, а также некоторая совместная система линейных неравенств, описывающих область решений
двух независимых переменных, а также некоторая совместная система линейных неравенств, описывающих область решений  найти такое, при котором линейная целевая функция
найти такое, при котором линейная целевая функция  принимает наименьшее значение.
принимает наименьшее значение. :
:  . Это значение достигается в точках прямой, удовлетворяющих уравнению
. Это значение достигается в точках прямой, удовлетворяющих уравнению (16).
(16). линейная функция
линейная функция  первый раз встретится с областью допустимых решений
первый раз встретится с областью допустимых решений  , и прямая становится опорной. Тогда значение
, и прямая становится опорной. Тогда значение 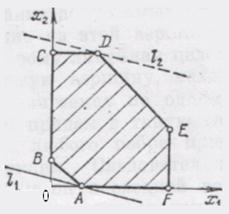 В заключение вернемся к рассмотренной ранее транспортной задаче . На рисунке изображен многоугольник
В заключение вернемся к рассмотренной ранее транспортной задаче . На рисунке изображен многоугольник  допустимых решений. Он получен как пересечение полуплоскостей, описываемых неравенствами (12). Опорная прямая
допустимых решений. Он получен как пересечение полуплоскостей, описываемых неравенствами (12). Опорная прямая  . Точка
. Точка  пересечения опорной прямой с многоугольником решений дает минимум целевой функции.
пересечения опорной прямой с многоугольником решений дает минимум целевой функции. (опорная прямая
(опорная прямая