Но гибкость микропроцессорной системы определяется не только этим. Настраиваться на задачу помогает еще и выбор режима работы системы, то есть режима обмена информацией по системной магистрали (шине).
Режимы работы микропроцессорной системы.
Как уже отмечалось, микропроцессорная система обеспечивает большую гибкость работы, она способна настраиваться на любую задачу. Гибкость эта обусловлена, прежде всего тем, что функции, выполняемые системой, определяются программой (программным обеспечением, software), которую выполняет процессор. Аппаратура (аппаратное обеспечение, hardware) остается неизменнойпри любой задаче. Записывая в память системы программу, можно заставить микропроцессорную систему выполнять любую задачу, поддерживаемую данной аппаратурой. К тому же шинная организация связей микропроцессорной системы позволяет довольно легко заменять аппаратные модули, например, заменять память на новую большего объема или более высокого быстродействия, добавлять или модернизировать устройства ввода/вывода, наконец, заменять процессор на более мощный. Это также позволяет увеличить гибкость системы, продлить ее жизнь при любом изменении требований к ней.
Практически любая развитая микропроцессорная система (в том числе и компьютер) поддерживает три основных режима обмена по магистрали:
• программный обмен информацией;
• обмен с использованием прерываний (Interrupts);
• обмен с использованием прямого доступа к памяти (ПДП, DMA — Direct Memory Access).
Программный обмен информацией является основным в любой микропроцессорной системе. Он предусмотрен всегда, без него невозможны другие режимы обмена. В этом режиме процессор является единоличным хозяином (или задатчиком, Master) системной магистрали. Все операции (циклы) обмена информацией в данном случае инициируются только процессором, все они выполняются строго в порядке, предписанном исполняемой программой.
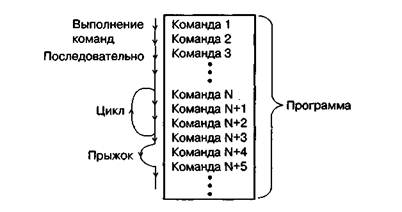
Рис. 1.13. Программный обмен информацией
Процессор читает (выбирает) из памяти коды команд и исполняет их, читая данные из памяти или из устройства ввода/вывода, обрабатывая их, записывая данные в память или передавая их в устройство ввода/вывода. Путь процессора по программе может быть линейным, циклическим, может содержать переходы (прыжки), но он всегда непрерывен и полностью находится под контролем процессора. Ни на какие внешние события, не связанные с программой, процессор не реагирует (рис. 1.13). Все сигналы на магистрали в данном случае контролируются процессором.
Обмен по прерываниям используется тогда, когда необходима реакция микропроцессорной системы на какое-то внешнее событие, на приход внешнего сигнала. В случае компьютера внешним событием может быть, например, нажатие на клавишу клавиатуры или приход по локальной сети макета данных. Компьютер должен реагировать на это, соответственно, выводом символа на экран или же чтением и обработкой принятого по сети макета.
И общем случае организовать реакцию на внешнее событие можно тремя различными путями:
o с помощью постоянного программного контроля факта наступления события (так называемый метод опроса флага или polling);
o с помощью прерывания, то есть насильственного перевода процессора с выполнения текущей программы на выполнение экстренно необходимой программы;
o с помощью прямого доступа к памяти, то есть без участия процессора при его отключении от системной магистрали.
Проиллюстрировать эти три способа можно следующим простым примером. Допустим, вы готовите себе завтрак, поставив на плиту кипятиться молоко. Естественно, на закисание молока надо реагировать, причем срочно. Как это организовать? Первый путь — постоянно следить за молоком, но тогда вы ничего другого не сможете делать. Правильнее будет регулярно поглядывать на молоко, делая одновременно что-то другое. Это программный режим с опросом флага. Второй путь — установить на кастрюлю с молоком датчик, который подаст звуковой сигнал при закипании молока, и спокойно заниматься другими делами. Услышав сигнал, вы выключите молоко. Правда, возможно, вам придется сначала закончить то, что вы начали делать, так что ваша реакция будет медленнее, чем в первом случае. Наконец, третий путь состоит в том, чтобы соединить датчик на кастрюле с управлением плитой так, чтобы при закипании молока горелка была выключена без вашего участия (правда, аналогия с ПДП здесь не очень точная, так как в данном случае на момент выполнения действия вас не отвлекают от работы).
Первый случай с опросом флага реализуется в микропроцессорной системе постоянным чтением информации процессором из устройства ввода/вывода, связанного с тем внешним устройством, на поведение которого необходимо срочно реагировать.
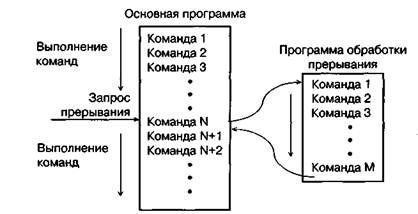
Во втором случае в режиме прерывания процессор, получив запрос прерывания от внешнего устройства (часто называемый IRQ — Interrupt ReQuest), заканчивает выполнение текущей команды и переходит к программе обработки прерывания. Закончив выполнение программы обработки прерывания, он возвращается к прерванной программе с той точки, где его прервали (рис. 1.14).
Здесь важно то, что вся работа, как и в случае программного режима, осуществляется самим процессором, внешнее событие просто временно отвлекает его. Реакция на внешнее событие по прерыванию в общем случае медленнее, чем при программном режиме. Как и в случае программного обмена, здесь все сигналы на магистрали выставляются процессором, то есть он полностью контролирует магистраль.
Для обслуживания прерываний в систему иногда вводится специальный модуль контроллера прерываний, но он в обмене информацией не участвует. Его задача состоит в том, чтобы упростить работу процессора с внешними запросами прерываний. Этот контроллер обычно программно управляется процессором по системной магистрали.
Рис. 1.14. Обслуживание прерывания.
Естественно, никакого ускорения работы системы прерывание не дает. Пго применение позволяет только отказаться от постоянного опроса флага внешнего события и временно, до наступления внешнего события, замять процессор выполнением каких-то других задач.
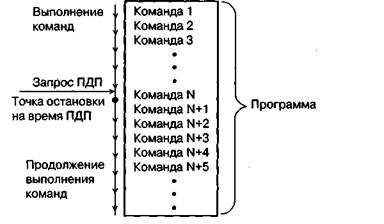
Прямой доступ к памяти (ПДП, DMA) — это режим, принципиально отличающийся от двух ранее рассмотренных режимов тем, что обмен но системной шине идет без участия процессора. Внешнее устройство, требующее обслуживания, сигнализирует процессору, что режим ПДП необходим, в ответ на это процессор заканчивает выполнение текущей команды и отключается от всех шин, сигнализируя запросившему устройству, что обмен в режиме ПДП можно начинать.
Операция ПДП сводится к пересылке информации из устройства ввода/ вывода в память или же из памяти в устройство ввода/вывода. Когда пересылка информации будет закончена, процессор вновь возвращается к прерванной программе, продолжая ее с той точки, где его прервали (рис. 1.13). Это похоже на режим обслуживания прерываний, но в данном случае процессор не участвует в обмене. Как и в случае прерываний, реакция на внешнее событие при ПДП существенно медленнее, чем при программном режиме.
Понятно, что в этом случае требуется введение в систему дополнительного устройства (контроллера ПДП), которое будет осуществлять полноценный обмен по системной магистрали без всякого участия процессора. Причем процессор предварительно должен сообщить этому контроллеру ПДП, откуда ему следует брать информацию и/или куда ее следует помещать. Контроллер ПДП может считаться специализированным процессором, который отличается тем, что сам не участвует в обмене, не принимает в себя информацию и не выдает ее (рис. 1.14).
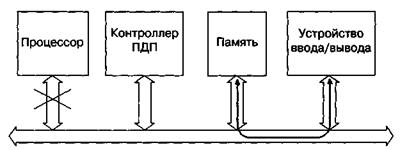
Системная магистраль
Рис. 1.16. Информационные потоки в режиме ПДП.
В принципе контроллер ПДП может входить в состав устройства ввода/вывода, которому необходим режим ПДП или даже в состав нескольких устройств ввода/вывода.
Теоретически обмен с помощью прямого доступа к памяти может обеспечить более высокую скорость передачи информации, чем программный обмен, так как процессор передает данные медленнее, чем специализированный контроллер ПДП. Однако на практике это преимущество реализуется далеко не всегда. Скорость обмена в режиме ПДП обычно ограничена возможностями магистрали. К тому же необходимость программного задания режимов контроллера ПДП может свести на нет выигрыш от более высокой скорости пересылки данных в режиме ПДП. Поэтому режим ПДП применяется редко.
Если в системе уже имеется самостоятельный контроллер ПДП, то это может в ряде случаев существенно упростить аппаратуру устройств ввода/ вывода, работающих в режиме ПДП. В этом, пожалуй, состоит единственное бесспорное преимущество режима ПДП.
До сих пор мы рассматривали только один тип архитектуры микропроцессорных систем — архитектуру с общей, единой шиной для данных и команд (одношинную, или принстонскую, фон-неймановскую архитектуру). Соответственно, в составе системы в этом случае присутствует одна общая память, как для данных, так и для команд (рис. 1.15).
Общая шина данных и команд
Рис. 1.17. Архитектура с общей шиной данных и команд.
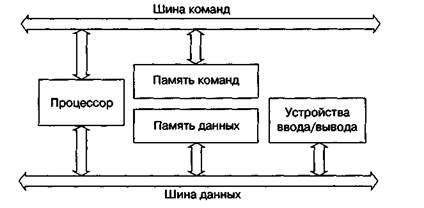
Но существует также и альтернативный тип архитектуры микропроцессорной системы — это архитектура с раздельными шинами данных и команд (двухшинная, или гарвардская, архитектура). Эта архитектура предполагает наличие в системе отдельной памяти для данных и отдельной памяти для команд (рис. 1.16). Обмен процессора с каждым из двух типов памяти происходит по своей шине.
Архитектура с общей шиной распространена гораздо больше, она применяется, например, в персональных компьютерах и в сложных микрокомпьютерах. Архитектура с раздельными шинами применяется в основном в однокристальных микроконтроллерах.
Рассмотрим некоторые достоинства и недостатки обоих архитектурных решений.
Архитектура с общей шиной (принстонская, фон-неймановская) проще , она не требует от процессора одновременного обслуживания двух шин, контроля обмена по двум шинам сразу. Наличие единой памяти данных и команд позволяет гибко распределять ее объем между кодами данных и команд. Например, в некоторых случаях нужна большая и сложная программа, а данных в памяти надо хранить не слишком много. В других случаях, наоборот, программа требуется простая, но необходимы большие объемы хранимых данных. Перераспределение памяти не вызывает никаких проблем, главное — чтобы программа и данные вместе помещались в памяти системы. Как правило, в системах с такой архитектурой память бывает довольно большого объема (до десятков и сотен мегабайт). Это позволяет решать самые сложные задачи.
Рис. 1.18. Архитектура с раздельными шинами данных и команд.
Архитектура с раздельными шинами данных и команд сложнее, она заставляет процессор работать одновременно с двумя потоками кодов, обслуживать обмен по двум шинам одновременно. Программа может размещаться только в памяти команд, данные — только в памяти данных. Такая узкая специализация ограничивает круг задач, решаемых системой, так как не дает возможности гибкого перераспределения памяти. Память данных и память команд в этом случае имеют не слишком большой объем, поэтому применение систем с данной архитектурой ограничивается обычно не слишком сложными задачами.
В чем же преимущество архитектуры с двумя шинами (гарвардской)?
В первую очередь, в быстродействии.
Дело в том, что при единственной шине команд и данных процессор вынужден по одной этой шине принимать данные (из памяти или устройства ввода/вывода) и передавать данные (в память или в устройство ввода/ вывода), а также читать команды из памяти. Естественно, одновременно эти пересылки кодов по магистрали происходить не могут, они должны производиться по очереди. Современные процессоры способны совместить во времени выполнение команд и проведение циклов обмена по системной шине. Использование конвейерных технологий и быстрой кэш-памяти позволяет им ускорить процесс взаимодействия со сравнительно медленной системной памятью. Повышение тактовой частоты и совершенствование структуры процессоров дают возможность сократить время выполнения команд. Но дальнейшее увеличение быстродействия системы возможно только при совмещении пересылки данных и чтения команд, то есть при переходе к архитектуре с двумя шинами.
В cлучae двухшинной архитектуры обмен по обеим шинам может быть независимым, параллельным во времени. Соответственно, структуры шин (количество разрядов кода адреса и кода данных, порядок и скорость обмена Информацией и т.д.) могут быть выбраны оптимально для той задачи, которая решается каждой шиной. Поэтому при прочих равных условиях переход на двухшинную архитектуру ускоряет работу микропроцессорной системы, хотя и требует дополнительных затрат на аппаратуру, усложнения структуры процессора. Память данных в этом случае имеет свое распределение адресов, а память команд — свое.
Проще всего преимущества двухшинной архитектуры реализуются внутри одной микросхемы. В этом случае можно также существенно уменьшить влияние недостатков этой архитектуры.
Поэтому основное ее применение — в микроконтроллерах, от которых не требуется решения слишком сложных задач, но зато необходимо максимальное быстродействие мри заданной тактовой частоте.
1.6. Типы микропроцессорных систем.
Диапазон применения микропроцессорной техники сейчас очень широк, требования к микропроцессорным системам предъявляются самые разные. Поэтому сформировалось несколько типов микропроцессорных систем, различающихся мощностью, универсальностью, быстродействием и структурными отличиями.
Основные типы следующие:
• микроконтроллеры — наиболее простой тип микропроцессорных систем, в которых все или большинство узлов системы выполнены в виде одной микросхемы;
• контроллеры — управляющие микропроцессорные системы, выполненные в виде отдельных модулей;
• микрокомпьютеры — более мощные микропроцессорные системы с развитыми средствами сопряжения с внешними устройствами.
• компьютеры (в том числе персональные) — самые мощные и наиболее универсальные микропроцессорные системы.
Четкую границу между этими типами иногда провести довольно сложно. Быстродействие всех типов микропроцессоров постоянно растет, и нередки ситуации, когда новый микроконтроллер оказывается быстрее, например, устаревшего персонального компьютера. Но кое-какие принципиальные отличия все-таки имеются.
Микроконтроллеры представляют собой универсальные устройства, которые практически всегда используются не сами по себе, а в составе более сложных устройств, в том числе и контроллеров. Системная шина микроконтроллера скрыта от пользователя внутри микросхемы. Возможности подключения внешних устройств к микроконтроллеру ограничены. Устройства на микроконтроллерах обычно предназначены для решения одной задачи.
Контроллеры, как правило, создаются для решения какой-то отдельной задачи или группы близких задач. Они обычно не имеют возможностей подключения дополнительных узлов и устройств, например, большой памяти, средств ввода/вывода. Их системная шина чаще всего недоступна пользователю. Структура контроллера проста и оптимизирована под максимальное быстродействие. В большинстве случаев выполняемые программы хранятся в постоянной памяти и не меняются. Конструктивно контроллеры выпускаются в одноплатном варианте.
Микрокомпьютеры отличаются от контроллеров более открытой структурой, они допускают подключение к системной шине нескольких дополнительных устройств. Производятся микрокомпьютеры в каркасе, корпусе с разъемами системной магистрали, доступными пользователю. Микрокомпьютеры могут иметь средства хранения информации на магнитных носителях (например, магнитные диски) и довольно развитые средства связи с пользователем (видеомонитор, клавиатура). Микрокомпьютеры рассчитаны на широкий круг задач, но в отличие от контроллеров, к каждой новой задаче его надо приспосабливать заново. Выполняемые микрокомпьютером программы можно легко менять.
Наконец, компьютеры и самые распространенные из них — персональные компьютеры — это самые универсальные из микропроцессорных систем. Они обязательно предусматривают возможность модернизации, а также широкие возможности подключения новых устройств. Их системная шина, конечно, доступна пользователю. Кроме того, внешние устройства могут подключаться к компьютеру через несколько встроенных портов связи (количество портов доходит иногда до 10). Компьютер всегда имеет сильно развитые средства связи с пользователем, средства длительного хранения информации большого объема, средства связи с другими компьютерами по информационным сетям. Области применения компьютеров могут быть самыми разными: математические расчеты, обслуживание доступа к базам данных, управление работой сложных электронных систем, компьютерные игры, подготовка документов и т.д.
Любую задачу в принципе можно выполнить с помощью каждого из перечисленных типов микропроцессорных систем. Но при выборе типа надо по возможности избегать избыточности и предусматривать необходимую для данной задачи гибкость системы.
В настоящее время при разработке новых микропроцессорных систем чаще всего выбирают путь использования микроконтроллеров (примерно в 80% случаев). При этом микроконтроллеры применяются или самостоятельно, с минимальной дополнительной аппаратурой, или в составе более сложных контроллеров с развитыми средствами ввода/вывода.
Классические микропроцессорные системы на базе микросхем процессоров и микропроцессорных комплектов выпускаются сейчас довольно редко, в первую очередь, из-за сложности процесса разработки и отладки этих систем. Данный тип микропроцессорных систем выбирают в основном тогда, когда микроконтроллеры не могут обеспечить требуемых характеристик.
Наконец, заметное место занимают сейчас микропроцессорные системы на основе персонального компьютера. Разработчику в этом случае нужно только оснастить персональный компьютер дополнительными устройствами сопряжения, а ядро микропроцессорной системы уже готово. Персональный компьютер имеет развитые средства программирования, что существенно упрощает задачу разработчика. К тому же он может обеспечить самые сложные алгоритмы обработки информации. Основные недостатки персонального компьютера — большие размеры корпуса и аппатурная избыточность для простых задач. Недостатком является и неприспособленность большинства персональных компьютеров к работе и. южных условиях (запыленность, высокая влажность, вибрации, высокие температуры и т.д.). Однако выпускаются и специальные персональные компьютеры, приспособленные к различным условиям эксплуатации.