Принцип действия фазовой дальномерной системы. Предположим, что ОС (одна из которых показана на рис. 9.2) непрерывно излучают навигационный сигнал в виде немодулированных колебаний частоты . Источником сигнала служит высокостабильный эталонный генератор ЭГ, а требуемая мощность обеспечивается усилителем УМ. Принятый потребителем П сигнал поступает на УРЧ, а с него – на измеритель фаз ИФ. В качестве опорных используются колебания, вырабатываемые генератором ОГ. Сигнал ОГ должен быть когерентным с излучаемым ОС навигационным сигналом. Предположим далее, что фазовая скорость распространения радиоволн постоянная, а доплеровский сдвиг частоты отсутствует.
Рис. 9.2. Структурная схема аппаратуры опорной станции и потребителя фазовой дальномерной системы
Тогда в некоторый момент на ИФ поступает сигнал ОС
, (9.6)
где – начальная фаза; – сдвиг сигнала по фазе в цепях приемника, а . Фаза навигационного сигнала в ИФ сравнивается с фазой опорного сигнала
. (9.7)
Измеренная разность фаз
. (9.8)
Информация о дальности до ОС заключена в первой составляющей . Остальные составляющие должны быть известны и учтены при измерении. При выполнении этого требования и основное уравнение фазового дальномера принимает вид
. (9.9)
Для уменьшения погрешности определения дальности при заданном значении погрешности необходимо уменьшать масштабный коэффициент, т.е. работать на возможно более высоких несущих частотах. Однако при больших возникает многозначность отсчета фазы, когда
, (9.10)
где – неизвестное целое число, а – показания измерителя фаз (рис. 9.3).
Рис. 9.3. Связь дальности и измеряемого фазового сдвига в фазовой дальномерной системе
Разрешение многозначности. Определение основано в фазовых РСДН на многошкальном методе, при котором формируется грубая шкала на разностной частоте и используется однозначная, но не очень точная, информация о местоположении от системы счисления координат потребителя.
Система счисления находит положение точки П (рис. 9.4,а) с СКП . Положение точки П в зоне неопределенности системы счисления, равной , уточняется по результатам измерений фазы на разностной частоте , где и – близкие к друг другу частоты опорных станций. Если измерить фазы навигационных сигналов с частотами и и образовать разность и , то
. (9.11)
Рис. 9.4. Диаграммы измерения дальности потребителя на грубой (а), средней (б) и
точной (в) шкалах
Формирование равносильно измерению фазы на низкой частоте , на которой интервал однозначного измерения фазы, а СКП измерения . Входящее в (9.10) неизвестное число определяется как , где – дальность, найденная по системе счисления.
Для сопряжения шкалы, формируемой системой счисления с более точной шкалой (рис. 9.4,б), организованной на частоте , т.е. для предотвращения потери информации о дальности (о числе ) при переходе на более точную (но неоднозначную) шкалу, необходимо выполнить условие
, (9.12)
где – погрешность системы счисления, а – коэффициент запаса. Коэффициент запаса должен лежать в пределах 4,4…5,3. По найденному можно найти значение разностной частоты .
Затем дальность уточняют по точной шкале (рис. 9.4,в), формируемой на несущей шкале . При этом условие сопряжения шкал принимает вид , где – интервал однозначного измерения дальности на частоте . Если это условие не выполняется, то используется промежуточная шкала на разностной частоте , где – дополнительная несущая частота ОС ().
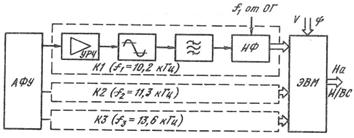
Принцип действия дальномерного варианта систем типа Omega. Стандартная система Omega состоит из восьми ОС (, , , , , , и ), рабочая зона которых перекрывает практически всю поверхность Земли. Дальность действия ОС составляет 9…10 тыс. км. Каждая из ОС в известный момент времени начинает передачу сигналов на частотах 10,2; 11,3 и 13,6 кГц. Частота =10,2 кГц служит для точного определения местоположения (км). На разностных частотах кГц и кГц устраняется многозначность отсчета (км и км).
В аппаратуре потребителя (рис. 9.5) поочередно принимаемые навигационные сигналы ОС поступают с антенно-фидерного устройства АФУ на три идентичных, но настроенных на разные частоты канала К1…К3 (на схеме раскрыт только канал К1). После усиления в УРЧ, амплитудного ограничения и узкополосной фильтрации навигационный сигнал подается на измеритель фаз ИФ, где его фаза сравнивается с фазой опорного сигнала, вырабатываемого генератором ОГ. Генератор ОГ служит для получения всех частот и синхросигналов, необходимых для работы аппаратуры потребителя, и строится на основе рубидиевого стандарта частоты (в квазидальномерной аппаратуре может использоваться генератор с кварцевой стабилизацией). Результаты измерения разности фаз сигналов всех ОС относительно опорного сигнала поступают в ЭВМ (специализированный процессор), которая выдает на индикатор И и внешние системы ВС результат расчета местоположения потребителя. В ЭВМ производится также счисление пути по информации о скорости и курсе потребителя, а полученные данные используются вместе с вычисленными разностями фаз и для разрешения многозначности. В ЭВМ могут включаться и отдельные элементы ИФ. В блоке памяти ЭВМ хранятся данные о координатах всех ОС и поправки на непостоянство фазовой скорости распространения радиоволн.
Рис. 9.5. Структурная схема аппаратуры потребителя системы «Omega»

 . Источником сигнала служит высокостабильный эталонный генератор ЭГ, а требуемая мощность обеспечивается усилителем УМ. Принятый потребителем П сигнал поступает на УРЧ, а с него – на измеритель фаз ИФ. В качестве опорных используются колебания, вырабатываемые генератором ОГ. Сигнал ОГ должен быть когерентным с излучаемым ОС навигационным сигналом. Предположим далее, что фазовая скорость распространения радиоволн постоянная, а доплеровский сдвиг частоты отсутствует.
. Источником сигнала служит высокостабильный эталонный генератор ЭГ, а требуемая мощность обеспечивается усилителем УМ. Принятый потребителем П сигнал поступает на УРЧ, а с него – на измеритель фаз ИФ. В качестве опорных используются колебания, вырабатываемые генератором ОГ. Сигнал ОГ должен быть когерентным с излучаемым ОС навигационным сигналом. Предположим далее, что фазовая скорость распространения радиоволн постоянная, а доплеровский сдвиг частоты отсутствует.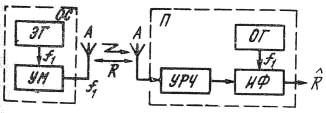
 на ИФ поступает сигнал ОС
на ИФ поступает сигнал ОС , (9.6)
, (9.6) – начальная фаза;
– начальная фаза;  – сдвиг сигнала по фазе в цепях приемника, а
– сдвиг сигнала по фазе в цепях приемника, а  . Фаза
. Фаза  навигационного сигнала в ИФ сравнивается с фазой
навигационного сигнала в ИФ сравнивается с фазой  опорного сигнала
опорного сигнала . (9.7)
. (9.7) . (9.8)
. (9.8) до ОС заключена в первой составляющей
до ОС заключена в первой составляющей  . Остальные составляющие должны быть известны и учтены при измерении. При выполнении этого требования
. Остальные составляющие должны быть известны и учтены при измерении. При выполнении этого требования  и основное уравнение фазового дальномера принимает вид
и основное уравнение фазового дальномера принимает вид . (9.9)
. (9.9) при заданном значении погрешности
при заданном значении погрешности  необходимо уменьшать масштабный коэффициент, т.е. работать на возможно более высоких несущих частотах. Однако при больших
необходимо уменьшать масштабный коэффициент, т.е. работать на возможно более высоких несущих частотах. Однако при больших  , (9.10)
, (9.10) – неизвестное целое число, а
– неизвестное целое число, а 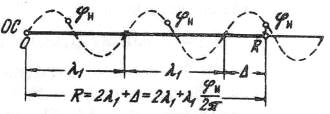
 . Положение точки П в зоне неопределенности системы счисления, равной
. Положение точки П в зоне неопределенности системы счисления, равной  , уточняется по результатам измерений фазы на разностной частоте
, уточняется по результатам измерений фазы на разностной частоте  , где
, где  – близкие к друг другу частоты опорных станций. Если измерить фазы навигационных сигналов с частотами
– близкие к друг другу частоты опорных станций. Если измерить фазы навигационных сигналов с частотами  и
и  , то
, то . (9.11)
. (9.11)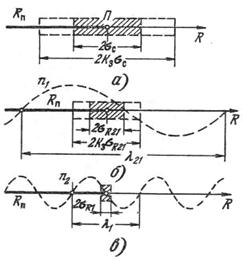
 равносильно измерению фазы на низкой частоте
равносильно измерению фазы на низкой частоте  , на которой интервал однозначного измерения фазы
, на которой интервал однозначного измерения фазы , а СКП измерения
, а СКП измерения  . Входящее в (9.10) неизвестное число
. Входящее в (9.10) неизвестное число  , где
, где  – дальность, найденная по системе счисления.
– дальность, найденная по системе счисления. ) при переходе на более точную (но неоднозначную) шкалу, необходимо выполнить условие
) при переходе на более точную (но неоднозначную) шкалу, необходимо выполнить условие , (9.12)
, (9.12) – погрешность системы счисления, а
– погрешность системы счисления, а  – коэффициент запаса. Коэффициент запаса должен лежать в пределах 4,4…5,3. По найденному
– коэффициент запаса. Коэффициент запаса должен лежать в пределах 4,4…5,3. По найденному  , где
, где  – интервал однозначного измерения дальности на частоте
– интервал однозначного измерения дальности на частоте  , где
, где  – дополнительная несущая частота ОС (
– дополнительная несущая частота ОС ( ).
). ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  и
и  ), рабочая зона которых перекрывает практически всю поверхность Земли. Дальность действия ОС составляет 9…10 тыс. км. Каждая из ОС в известный момент времени начинает передачу сигналов на частотах 10,2; 11,3 и 13,6 кГц. Частота
), рабочая зона которых перекрывает практически всю поверхность Земли. Дальность действия ОС составляет 9…10 тыс. км. Каждая из ОС в известный момент времени начинает передачу сигналов на частотах 10,2; 11,3 и 13,6 кГц. Частота  км). На разностных частотах
км). На разностных частотах  кГц и
кГц и  кГц устраняется многозначность отсчета (
кГц устраняется многозначность отсчета ( км и
км и  км).
км). и курсе
и курсе  потребителя, а полученные данные используются вместе с вычисленными разностями фаз
потребителя, а полученные данные используются вместе с вычисленными разностями фаз  для разрешения многозначности. В ЭВМ могут включаться и отдельные элементы ИФ. В блоке памяти ЭВМ хранятся данные о координатах всех ОС и поправки на непостоянство фазовой скорости распространения радиоволн.
для разрешения многозначности. В ЭВМ могут включаться и отдельные элементы ИФ. В блоке памяти ЭВМ хранятся данные о координатах всех ОС и поправки на непостоянство фазовой скорости распространения радиоволн.