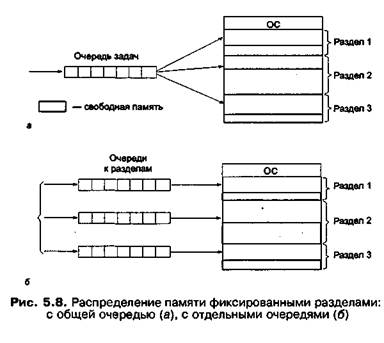
Простейший способ управления оперативной памятью состоит в том, что память разбивается на несколько областей фиксированной величины, называемых разделами. Такое разбиение может быть выполнено вручную оператором во время старта системы или во время ее установки. После этого границы разделов не изменяются.
Очередной новый процесс, поступивший на выполнение, помещается либо в общую очередь (рис. 5.8, а), либо в очередь к некоторому разделу (рис. 5.8, б).
Подсистема управления памятью в этом случае выполняет следующие задачи.
□ Сравнивает объем памяти, требуемый для вновь поступившего процесса, с размерами свободных разделов и выбирает подходящий раздел.
□ Осуществляет загрузку программы в один из разделов и настройку адресов. Уже на этапе трансляции разработчик программы может задать раздел, в котором ее следует выполнять. Это позволяет сразу, без использования перемещающего загрузчика, получить машинный код, настроенный на конкретную область памяти.
При очевидном преимуществе — простоте реализации, данный метод имеет существенный недостаток — жесткость. Так как в каждом разделе может выполняться только один процесс, то уровень мультипрограммирования заранее ограничен числом разделов. Независимо от размера программы она будет занимать весь раздел. Так, например, в системе с тремя разделами невозможно выполнять одновременно более трех процессов, даже если им требуется совсем мало памяти. С другой стороны, разбиение памяти на разделы не позволяет выполнять процессы, программы которых не помещаются ни в один из разделов, но для которых было бы достаточно памяти нескольких разделов.
Такой способ управления памятью применялся в ранних мультипрограммных ОС. Однако и сейчас метод распределения памяти фиксированными разделами находит применение в системах реального времени, в основном благодаря небольшим затратам на реализацию. Детерминированность вычислительного процесса систем реального времени (заранее известен набор выполняемых задач, их требования к памяти, а иногда и моменты запуска) компенсирует недостаточную гибкость данного способа управления памятью.
В этом случае память машины не делится заранее на разделы. Сначала вся память, отводимая для приложений, свободна. Каждому вновь поступающему на выполнение приложению на этапе создания процесса выделяется вся необходимая ему память (если достаточный объем памяти отсутствует, то приложение не принимается на выполнение и процесс для него не создается). После завершения процесса память освобождается, и на это место может быть загружен другой процесс. Таким образом, в произвольный момент времени оперативная память представляет собой случайную последовательность занятых и свободных участков (разделов) произвольного размера. На рис. 5.9 показано состояние памяти в различные моменты времени при использовании динамического распределения. Так, в момент t0в памяти находится только ОС, а к моменту ttпамять разделена между 5 процессами, причем процесс П4, завершаясь, покидает память. На освободившееся от процесса П4 место загружается процесс П6, поступивший в момент t3.
Функции операционной системы, предназначенные для реализации данного метода управления памятью, перечислены ниже.
Ведение таблиц свободных и занятых областей, в которых указываются начальные адреса и размеры участков памяти.
□ При создании нового процесса — анализ требований к памяти, просмотр таблицы свободных областей и выбор раздела, размер которого достаточен для размещения кодов и данных нового процесса. Выбор раздела может осуществляться по разным правилам, например: «первый попавшийся раздел достаточного размера», «раздел, имеющий наименьший достаточный размер» или «раздел, имеющий наибольший достаточный размер».
□ Загрузка программы в выделенный ей раздел и корректировка таблиц свободных и занятых областей. Данный способ предполагает, что программный код не перемещается во время выполнения, а значит, настройка адресов может быть проведена единовременно во время загрузки.
□ После завершения процесса корректировка таблиц свободных и занятых областей.
По сравнению с методом распределения памяти фиксированными разделами данный метод обладает гораздо большей гибкостью, но ему присущ очень серьезный недостаток — фрагментация памяти. Фрагментация — это наличие большого числа несмежных участков свободной памяти очень маленького размера (фрагментов). Настолько маленького, что ни одна из вновь поступающих программ не может поместиться ни в одном из участков, хотя суммарный объем фрагментов может составить значительную величину, намного превышающую требуемый объем памяти.
Распределение памяти динамическими разделами лежит в основе подсистем управления памятью многих мультипрограммных операционных системах 60-70-х годов, в частности такой популярной операционной системы, как OS/360.