BSC – Balanced Scorecard (сбалансированная система показателей)
СМК – система менеджмента качества
ССП – сбалансированная система показателей
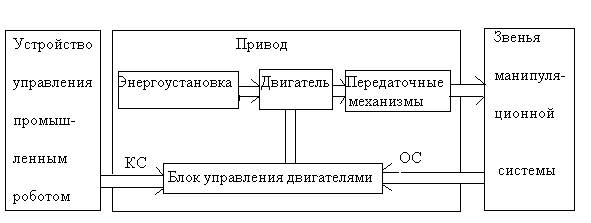
Под приводом ПР понимается совокупность технических средств, предназначенных для приведения в движение всех звеньев манипуляционной системы и схвата рабочего органа в соответствии с требованиями производственного процесса. В функциональном отношении привод помещается между устройством управления ПР и звеньями манипуляционной системы так, как это показано на рис. 4.1.
Рис. 4.1. Общая структура привода промышленного робота.
Приводы ПР включают в себя двигатель, систему управления, передаточные механизмы, тормозные устройства, датчики обратной связи и коммуникации. Коммуникации необходимы для передачи энергии к приводам и передачи сигналов управления, а также для выполнения обратной связи.
Выбор типа привода зависит от функционального назначения ПР. Основными факторами, определяющими выбор типа привода являются: назначение и условия эксплуатации, грузоподъемность и требуемые динамические характеристики конструкции, а также вид системы управления.
К приводу любого вида предъявляют общие требования:
– минимальные габаритные размеры при высоких энергетических показателях, обеспечивающие большое значение отношения выходной мощности к массе;
– возможность работы в режиме автоматического управления и регулирования, обеспечивающем оптимальные законы разгона и торможения при минимальном времени переходных процессов;
– быстродействие, т.е. осуществление движений исполнительных механизмов с высокими скоростями и малой погрешностью позиционирования;
– малая масса элементов привода при высоком КПД всей конструкции;
– надежность и долговечность элементов конструкции;
– удобство монтажа, ремонта, обслуживания, переналадки и бесшумность работы.
В зависимости от используемого вида энергии приводы подразделяют на гидравлические, пневматические, электрические и комбинированные (например, электрогидравлические, гидропневматические и др.)
В общем случае привод состоит из энергоустановки (преобразователя энергии) двигателей, передаточных механизмов и блока управления двигателями. Ко всем типам приводов в робототехнике предъявляются специальные требования. Основные из них: минимальный вес и габариты, повышенные энергетические, а также статические и динамические характеристики, легкость регулирования в большом диапазоне скоростей, реверсивность, большой ресурс и плавность движений, стабильность характеристик в широком диапазоне нагрузок, фиксация положения звена при отключении привода, независимость характеристик от изменения температуры. Особенностью является также взаимосвязанная групповая работа приводов всех степеней подвижности робота.
По степени управляемости различают приводы:
- нерегулируемые, обеспечивающие движение звеньев с одной рабочей скоростью;
- регулируемые, обеспечивающие заданную скорость движения при изменяющихся параметрах привода;
- следящие, обеспечивающие перемещение звена с заданной точностью при произвольном задающем сигнале;
- адаптивные, автоматически выбирающие оптимальные параметры управления при изменении условий работы.
Силовыми модулями манипуляторов промышленных роботов служат различные типы приводов – электрические, гидравлические, пневматические.
Наиболее удобны в эксплуатации электроприводы, так как гидро- и пневмоприводы имеют склонность к утечкам рабочего тела и требуют специальных станций питания, издающих шум.
Кроме двигателя в состав привода для каждой степени подвижности входят: усилители мощности, передаточные устройства, а также корректирующие цепи, датчики обратных связей по скорости и положению, а иногда и силомоментные датчики. Их наличие полностью необходимо в замкнутых следящих приводах для контурных и контурно-позиционных систем управления. Основными параметрами привода являются: мощность, быстродействие и точность отработки командных сигналов. Для выбора того или иного типа привода при конструировании ПР наиболее существенным является вид энергии. Поэтому одна из распространенных классификаций приводов основана на этом признаке (рис.4.2).
Рис.4.2. Классификация приводов.
Большинство пневмоприводов, часть гидроприводов и приводы с шаговыми двигателями действуют по разомкнутому циклу.
Пневматический привод.
Пневмопривод применяется в основном в ПР с цикловым управлением. Функционально такой пневмопривод можно разделить на следующие узлы:
– блок подготовки рабочего тела (воздуха);
– блок распределения сжатого воздуха;
– блок исполнительных двигателей;
– система передачи сжатого воздуха между устройствами привода.
Блок подготовки воздуха является обязательным для ПР с пневмоприводом. Воздух осушают и очищают от пыли.
Блок распределения сжатого воздуха содержит устройства, с помощью которых по заданной программе можно открыть или закрыть доступ сжатого воздуха в рабочие полости исполнительных двигателей. В качестве распределителей служат устройства, где запорными устройствами служат золотники и клапаны. Обычно используют пневмораспределители с управлением от электромагнитов и командоаппаратов. Однако при определенных условиях (взрывоопасная среда, радиация) используются распределители с пневматическим управлением.
В качестве блока исполнительных двигателей используются цилиндры с прямолинейным или вращательным движением поршня одно- или двустороннего действия. На каждую степень подвижности предусматривается свой исполнительный двигатель (пневмоцилиндр), конструкция которого обеспечивает заданные перемещения, скорости и усилия.
Захватное устройство ПР также может иметь двигатель, который обеспечивает захват объекта манипулирования, его удержание при перемещении и освобождение после установки в заданной точке.
Рабочий цикл выполняется каждым двигателем в определенной последовательности в соответствии с требованиями технологического процесса и осуществляется по программе, выполняемой управляющим устройством робота, которое входит в состав СПУ.
В системы передачи сжатого воздуха между устройствами привода используются пневмопроводы различного сечения, рассчитываемого исходя из заданных условий работы.