Функциональные элементы приборов летательных аппаратов
Микроэлектродвигатели решают в приборах и системах ЛА следующие основные задачи:
– являются исполнительными элементами следящих систем;
– являются исполнительными элементами в гироскопических стабилизаторах (двигатели стабилизации);
– выполняют роль приводов динамически настраиваемых гироскопов;
– приводят во вращение подвижные системы различных измерительных устройств;
– приводят во вращение роторные системы классических гироскопов;
– выполняют роль коррекционных двигателей в гироскопических измерительных системах.
В настоящем разделе учебника рассмотрены исполнительные двигатели следящих систем и систем стабилизации измерительных устройств летательных аппаратов.
Существует несколько серий микроэлектродвигателей постоянного и переменного тока, применяемых в следящих системах и системах стабилизации в качестве исполнительных элементов: ДПР, ДМ, МДГ, ДИД и другие.
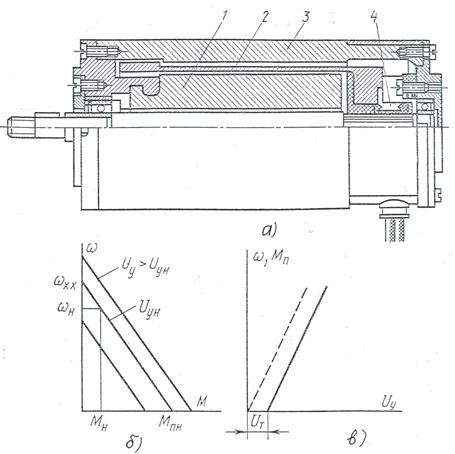
Микродвигатели серии ДПР являются двигателями постоянного тока с возбуждением от постоянных магнитов. Конструкция двигателя и его основные характеристики приведены на (рис. 4.1.).
Основными элементами двигателя являются: постоянный магнит 1, якорь (ротор) 2, магнитопровод 3 (корпус двигателя), коллектор 4. Для снижения момента инерции ротора 4 и, следовательно, повышения быстродействия двигателя его якорь (ротор) изготовляют в виде полого тонкостенного немагнитного стакана. Обмотку якоря укладывают на цилиндрический каркас и заливают пластмассой. После заливки концы секций обмотки якоря соединяют с пластинами коллектора.
Принцип действия двигателя основан на законе Ампера, в соответствии с которым на проводник, по которому протекает электрический ток, находящийся в поле постоянного магнита, действует механическая сила. Создаваемый в соответствии с этим законом вращающий момент приводит якорь и, следовательно, составляющий с ним единое целое ротор во вращение.
Рис.4.1. Микродвигатель постоянного тока с полым якорем серии ДПР:
Недостатками конструкции двигателя постоянного тока является наличие коллектора и значительного немагнитного промежутка в магнитной цепи двигателя, который складывается из двух воздушных зазоров и толщины полого ротора. Это требует увеличения намагничивающей силы возбуждения. Однако, так как в данной конструкции двигателя на якоре отсутствуют ферромагнитные массы, а на статоре – обмотки возбуждения, а следовательно, отсутствуют потери в них, то коэффициент полезного действия таких двигателей (30÷45%) находится примерно на том же уровне, что и в других двигателях.
Достоинством двигателей постоянного тока является линейность их механической характеристики – зависимость частоты вращения ротора от момента нагрузки на валу двигателя и напряжения управления. Кроме того, положительным качеством двигателей с полым ротором является работа практически без искрения в коллекторе и малая постоянная времени (0,01 – 0,02 с). Двигатели серии ДПР имеют мощность 0,35 – 15 Вт.
В настоящее время в качестве стабилизирующих двигателей гироскопических измерительных систем нашли применение двигатели постоянного тока серии ДМ. Они имеют плоскую конструкцию, скорости вращения от 0 до 1000 об/мин, что позволяет исключить редуктор, упростить управление их работой, уменьшить массу и габариты гироскопических систем.
В бескорпусном исполнении двигатели данной серии изготовляют в виде отдельных элементов конструкции, что значительно упрощает конструкции гироскопических систем. Внешний вид двигателя серии ДМ показан на рис. 4.2., некоторые технические характеристики приведены в таблице 4.1.
Таблица 4.1. Технические характеристики двигателей постоянного тока серии ДМ.
Технические параметры
Тип двигателя
ДМ-3
ДМ-5
ДМ-10
ДМ-20
ДМ-21
Крутизна моментной характеристики, Н·см/А
Максимальный потребляемый ток, А
1,6
1,3
1,5
0,7
1,0
Момент трения, Н·см·10-2
0,23
0,07
0,22
0,15
0,11
Габаритные размеры, мм
72×25×26
50×15×16
72×26×17
60×16×18
70×38×11
Масса, г
Они представляют собой двухфазные асинхронные двигатели с ротором в виде полого немагнитного стакана, изготовленного из алюминия. Конструкция двигателя данной серии и его характеристики представлены на рис. 4.3.
Рис. 4.2. Внешний вид двигателя серии ДМ.
Микродвигатели переменного тока серии ДИД
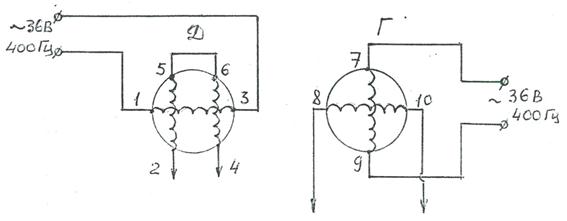
В корпус 5 вставлен внешний статор 3 (магнитопровод), склеенный из пластин, изготовленных из сплава с высокой магнитной проницаемостью – пермаллоя. Внутри полого ротора 2 находится внутренний статор, также изготовленный из пластин пермаллоя. По всей окружности пластины внутреннего статора имеют пазы, в которые укладываются две обмотки 1 – обмотка возбуждения, включаемая в сеть переменного тока напряжением 36 В, частотой 400 Гц, и обмотка управления, состоящая их двух частей 2 – 5 и 4 – 6 (рис. 4.3,а), что дает возможность удобно реверсировать направление вращения ротора двигателя. Оси обмоток статора сдвинуты между собой в пространстве на 90°. Кроме того, токи этих обмоток обычно сдвинуты во времени на 90°. Сдвиг токов между обмотками возбуждения и управления достигается включением их на разные фазы трехфазной сети питания.
В зазоре между магнитопроводом и внутренним статором помещен полый тонкостенный стакан (ротор) 2, сидящий на валу 4.
Возникающее вращающееся магнитное поле наводит токи в роторе, который представляет собой короткозамкнутый виток, аналогичный ротору асинхронного двигателя, имеющему короткозамкнутый виток в виде «беличьего колеса». При взаимодействии токов ротора с вращающимся магнитным полем статора создается момент, который вызывает вращение ротора.
Частота вращения магнитного поля статора составляет
об/мин,
где f – частота питающего переменного напряжения;
p – число пар полюсов (в двигателях серии ДИД p=1).
Рис.4.3. Микродвигатель переменного тока серии ДИД:
В отличие от обычных асинхронных двигателей, двигатели серии ДИД работают с большим скольжением. Так в наиболее широко применяемом в приборных устройствах двигателе ДИД-0,5ТА величина скольжения доходит до 0,35, поэтому номинальная частота вращения ротора составляет порядка 16 000 об/мин, постоянная времени равна 0,08 сек.
Частота вращения ротора ДИД-0,5 при постоянном моменте примерно пропорциональна напряжению, поданному на обмотку управления, т.е. , поэтому данный двигатель с редуктором может рассматриваться как интегрирующее звено, так как угол поворота вала редуктора равен
(4.1.)
где K1, K2 – коэффициенты, характеризующие конструктивные
параметры;
Uy – величина напряжения на обмотке управления.
Двигатели серии ДИД могут работать в следующих режимах:
– с редуктором при сдвиге фаз между токами возбуждения и управления 60° – 90° – 120° при питании обмоток от различных фаз или через емкость;
– с редуктором при питании обмоток управления прерывистым постоянным током напряжением 27 В, частотой 400 Гц.
Максимальная мощность на валу ДИД-0,5ТА – не менее 0,4 Вт.
Двигатели-генераторы серии МДГ
Двигатели-генераторы серии МДГ представляют собой сочетание двух электрических машин, аналогичных по конструкции: двухфазного индукционного двигателя и двухфазного индукционного тахогенератора. Двигатели-генераторы серии МДГ применяются в качестве исполнительных устройств в следящих системах и системах стабилизации при необходимости оптимизации динамических характеристик привода за счет введения скоростной обратной связи. Скоростная обратная связь повышает динамическую устойчивость следящего привода, благодаря демпфированию колебательного процесса, возникающего из-за увеличения коэффициента усиления усилителя.
Конструкция двигателя-генератора серии МДГ приведена на рис. 4.4., внешний вид на рис. 4.5. Статор 1 с обмоткой двигателя установлен и завальцован в задней крышке 2. Статор 3 с обмоткой тахогенератора установлен и завальцован в передней крышке 4. Внешние магнитопроводы 5 двигателя и 6 тахогенератора заармированы в корпусе 7.
Рис.4.4. Конструкция двигателя-генератора серии МДГ
Вал 8 вращается в двух подшипниках, один из которых расположен в передней крышке 4, второй – в задней крышке 2. На валу 8 находятся ротор двигателя 9 и ротор тахогенератора 10. Для исключения взаимного магнитного влияния двигателя и тахогенератора имеется экран 11. На выходном конце вала установлено малое зубчатое колесо – трибка 12 с экраном 13. Трибка прикреплена к валу гайкой 14, которая после завертывания обжата и запаяна.
Схема включения МДГ приведена на рис. 4.6.
Рис. 4.6. Схема соединений двигателя-генератора.
Технические характеристики двигателей-генераторов серии МДГ приведены в таблице 4.2.
Таблица 4.2. Технические характеристики двигателей-генераторов серии МДГ.
Технические характеристики
Тип двигателя-генератора
МДГ-0,1Д
МДГ-0,25Д
Напряжение питания по цепям возбуждения двигателя и генератора, В
цепи управления двигателя, В
до 12
до 12
Напряжение трогания, В
0,8
0,8
Пусковой момент, г·см
Скорость холостого хода, об/мин
Масса, г
Двигатель с перекатывающимся ротором
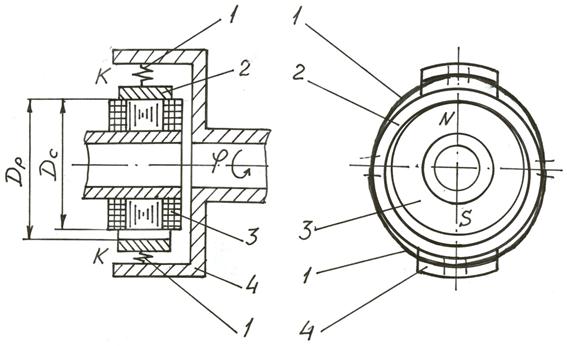
Схема двигателя с перекатывающимся ротором приведена на рис. 4.7. Статор 3 выполнен из пластин электротехнической стали. В пазы статора уложена трехфазная или двухфазная обмотка. Ротор 2 представляет собой кольцо, изготовленное из пермаллоя. Ротор связан с выходным валом 4 с помощью четырех плоских изогнутых пружин 1. Эти упругие элементы с одного конца соединены с ротором, с другого конца – с выходным валом. Упругий подвес ротора обеспечивает малую радиальную жесткость K соединения и большую угловую жесткость. При подаче в обмотку статора переменного питающего напряжения возникает вращающееся магнитное поле статора, то есть на поверхности статора сформируются и будут перемещаться по нему магнитные полюса N-S с частотой вращения магнитного поля.
Рис.4.7. Схема двигателя с перекатывающимся ротором
Ротор притягивается к поверхности статора в одной из точек N или S, и при перемещении полюсов у поверхности статора все новые и новые точки внутренней поверхности ротора будут касаться статора, то есть ротор будет как бы обкатываться по статору. Из-за разности длин окружностей ротора и статора за один оборот магнитного поля статора ротор повернется вслед за магнитным полем статора на отрезок , то есть повернется вокруг оси вращения на угол, равный и эта величина является передаточным отношением i данного преобразователя
(4.2.)
При величине зазора δ, равной 0,2 – 0,3 мм, частота вращения выходного вала будет составлять несколько десятков оборотов в минуту. При смене фазы питающего напряжения направление вращения выходного вала реверсируется. Данный двигатель используется для приведения во вращение промежуточных колец трехколечных шарикоподшипниковых опор карданного подвеса гироскопических приборов.


 об/мин,
об/мин,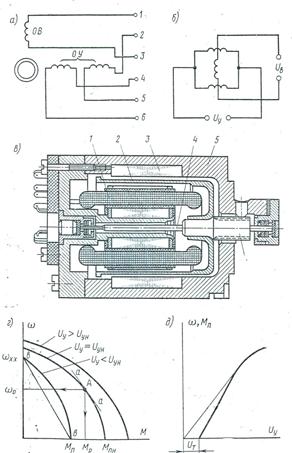
 , поэтому данный двигатель с редуктором может рассматриваться как интегрирующее звено, так как угол поворота вала редуктора равен
, поэтому данный двигатель с редуктором может рассматриваться как интегрирующее звено, так как угол поворота вала редуктора равен


 , то есть повернется вокруг оси вращения на угол, равный
, то есть повернется вокруг оси вращения на угол, равный  и эта величина является передаточным отношением i данного преобразователя
и эта величина является передаточным отношением i данного преобразователя