Магнитоэлектрические преобразовательные устройства (преобразователи) применяются для преобразования постоянного электрического тока в силу или момент. В измерительных устройствах их используют для решения следующих основных задач:
– в качестве измерительных приборов – гальванометров и логометров;
– в качестве силовых элементов, создающих противодействующие силы и моменты, воздействующие на подвижную систему прибора.
Основными элементами магнитоэлектрических преобразователей являются магнитные системы, состоящие из постоянных магнитов и магнитопроводов, и обмотки, по которым протекает электрический ток. Постоянные магниты являются источниками постоянного магнитного потока, который замыкается с помощью магнитопровода, создавая замкнутую магнитную систему, необходимую для работы магнитоэлектрического преобразователя. Принцип действия магнитоэлектрических преобразователей основан на законе Ампера. В соответствии с законом Ампера на проводник, по которому протекает постоянный электрический ток, если проводник помещен в магнитное поле постоянного магнита, будет действовать сила, направление которой определяется правилом левой руки.
Постоянные магниты представляют собой предварительно намагниченные тела из магнитотвердого материала, поэтому одним из основных требований к магнитам является обеспечение ими магнитного потока, стабильного во времени, при изменении условий окружающей среды и при наличии внешних возмущений.
Основные характеристики постоянных магнитов
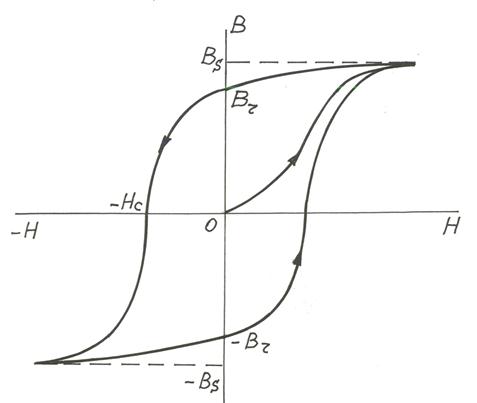
При внесении во внешнее магнитное поле полностью размагниченного образца, изготовленного из магнитотвердого материала, и повышении напряженности внешнего магнитного поля намагниченность образца будет изменяться в соответствии с кривой намагничивания до момента достижения состояния насыщения, при этом образец будет иметь величину магнитной индукции, равную Bs (индукцию насыщения) (рис. 3.26.).
Рис. 3.26. Вид петли магнитного гистерезиса.
При уменьшении напряженности внешнего магнитного поля до нуля образец будет иметь остаточную индукцию Br. Для полного размагничивания такого образца его нужно поместить во внешнее магнитное поле противоположной полярности. Величина напряженности такого внешнего магнитного поля, при котором магнитная индукция постоянного магнита становится равной нулю, то есть магнит полностью размагничивается, называется коэрцитивной силой. Коэрцитивной силе соответствует на графике петли магнитного гистерезиса (рис. 3.26.) точка -Hc. При увеличении напряженности такого поля образец вновь намагничивается, но при этом он имеет магнитное поле противоположной полярности. При замкнутом цикле намагничивания и размагничивания на графике зависимости B=f(H) получается петля гистерезиса.
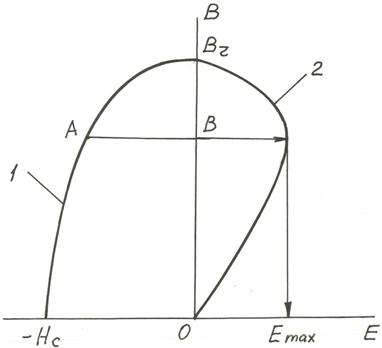
Одной из наиболее важных характеристик постоянных магнитов, которая используется при расчете магнитных систем, является кривая размагничивания. Кривой размагничивания называют часть петли гистерезиса, находящуюся во втором квадранте системы координат и соответствующую циклу размагничивания постоянного магнита (рис. 3.27.).
Рис. 3.27. Вид кривых размагничивания и магнитной энергии:
1 – кривая размагничивания; 2 – кривая магнитной энергии E=B·H.
Величину остаточной магнитной индукции, равной Br при H=0, то есть при снятии внешнего магнитного поля, магнит может иметь только в том случае, если он представляет собой замкнутый магнитопровод. Однако, обычно постоянные магниты выполняют с зазорами, в которых располагают устройства, реализующие магнитную энергию, например токонесущие проводники. При расчете магнитных систем принимается условие, что влияние воздушного зазора на величину магнитной индукции постоянного магнита эквивалентно влиянию внешнего размагничивающего поля на постоянный магнит, не имеющий воздушного зазора [3]. При наличии воздушного зазора в магните точка на кривой размагничивания, соответствующая величине индукции магнита, и называемая рабочей точкой, смещается по кривой влево и вниз в направлении снижения индукции. Определение положения рабочей точки магнита, вызываемого наличием воздушного зазора в магнитной системе, является одной из основных задач расчета параметров магнитной системы.
Определим величину индукции в точке А при наличии размагничивающего поля напряженностью HA.
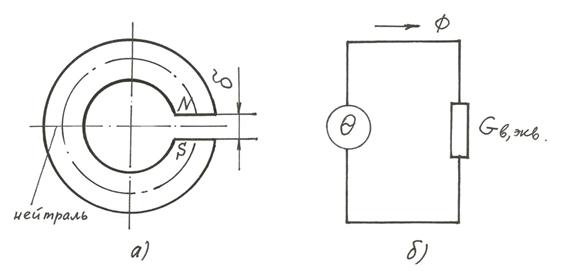
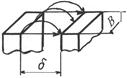
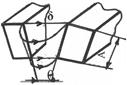
При наличии замкнутого магнита в виде кольца (рис. 3.28,а) его магнитодвижущая сила равна
(3.33.)
где lм – длина средней линии магнита.
Индукция магнита в этом случае равна Br.
При наличии воздушного зазора δ (рис. 3.28, б) часть магнитодвижущей силы теряется в зазоре, что аналогично действию внешнего размагничивающего поля, тогда
(3.34.)
где θм – часть магнитодвижущей силы, приходящаяся на оставшийся магнит;
θв – часть магнитодвижущей силы, приходящаяся на воздушный зазор.
На основании закона Ома для магнитной цепи следует
(3.35.)
или
(3.36.)
где Gв – проводимость воздушного зазора.
Если предположить, что весь магнитный поток проходит через воздушный зазор и потоки рассеивания отсутствуют, то
(3.37.)
откуда
(3.38.)
где Sм – площадь магнита.
Рис. 3.28. К определению точки А магнита с воздушным зазором.
а – схема замкнутого магнита;
б – схема магнита, имеющего воздушный зазор;
в – схема к определению рабочей точки А магнита.
Из рис. (3.28,в) следует, что
(3.39.)
где mH, mB – масштабы по осям H и B.
Таким образом,
(3.40.)
В итоге рабочую точку А (индукцию в рабочем воздушном зазоре) можно определить координатами точки пересечения кривой размагничивания с прямой, проведенной под углом γ к оси абсцисс. Эта прямая называется прямой проводимости, угол γ – углом проводимости, а уравнение (3.40.) является основным уравнением для расчета магнитной системы с постоянным магнитом.
Если известны данные о материале магнита в виде кривой размагничивания, размеры магнита в виде параметров lм и Sм и размеры воздушного зазора Sви δ, то по формуле (3.40.) можно вычислить значение угла проводимости γ, провести под углом γ линию проводимости и по графику кривой размагничивания определить индукцию Bм в нейтрали магнита при наличии зазора в магнитной системе (индукцию BА).
При расчете магнитных систем, наряду с величиной магнитной индукции B или магнитного потока Ф для характеристики магнитного поля используют величину магнитного момента Mм, который связан с величиной интенсивности намагничивания J и индукцией B зависимостью [3]
(3.41.)
где J – интенсивность намагничивания;
μ0 – магнитная постоянная, равная
H – напряженность магнитного поля;
V – объем магнита;
B – магнитная индукция.
Размагничивающее действие воздушного зазора, определяемое отрезком HА, пропорционально интенсивности намагничивания
(3.42.)
где Nм – коэффициент размагничивания, определяемый параметрами магнита и воздушного зазора.
Одной из важнейших характеристик постоянных магнитов является магнитная энергия E=B·H. При полной потере намагниченности B=0 или когда магнитная энергия не потребляется, то H=0, поэтому магнитная энергия в зазоре равна нулю.
Правильно спроектированная магнитная система должна иметь такие параметры, чтобы индукция в нейтральном сечении магнита была близка к максимальной, т.е. рабочая точка А соответствовала бы такому положению на кривой размагничивания, которое соответствовало бы максимальной магнитной энергии (рис. 3.27.).
Для определения точки А, которой соответствует максимальная магнитная энергия, применяют графический способ: проводят прямые, параллельные осям абсцисс и ординат на графике кривой размагничивания на расстояниях Brи Hс, точка пересечения диагонали полученного прямоугольника и кривой размагничивания приближенно соответствует значениям BА и HА, определяющим максимальную величину магнитной энергии для данной магнитной системы (рис. 3.29.).
Рис. 3.29. Схема, иллюстрирующая графический метод определения рабочей точки А, соответствующей максимальной магнитной энергии.
Для получения требуемого характера магнитного поля в рабочем зазоре часто магнитная система имеет дополнительные детали (полюсные наконечники или арматуру).
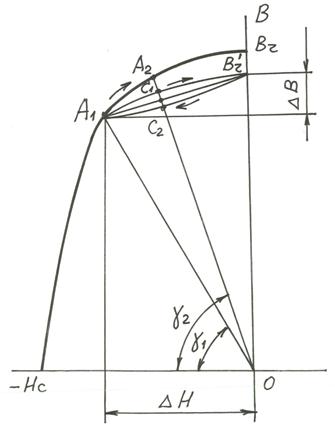
С точки зрения упрощения технологии часто магнит намагничивают отдельно, а потом собирают с арматурой, получая магнитную систему. При этом после сборки магнита с арматурой уменьшается воздушный зазор магнитной системы и возрастает проводимость в зазоре G в, что приводит к смещению рабочей точки в сторону увеличения индукции (рис. 3.30.) от А1 к А2. Однако в этом случае кривая размагничивания, характеризующая изменение индукции магнитной системы, будет проходить ниже кривой размагничивания постоянного магнита, и величина остаточной магнитной индукции будет соответствовать величине Br'. Кривая, соединяющая точки А1 и Br', называется кривой возврата. При разборке магнитной системы рабочая точка будет смещаться по кривой Br'С2А1, проходящей ниже кривой А1С1Br', что характеризует частный цикл намагничивания и размагничивания магнитной системы с арматурой. Площадь получаемой петли невелика, поэтому при практических расчетах магнитных систем указанные кривые заменяют прямой линией А1Br', которая называется прямой возврата, а ее наклон характеризуют коэффициентом возврата, определяемым по формуле
(3.43.)
Рис. 3.30. Схема, поясняющая понятие кривой возврата.
Расчет магнитных систем с постоянными магнитами
Точный расчет магнитных систем с постоянными магнитами затруднен, поэтому часто используют методики приближенного расчета. Это является допустимым, так как при контроле собранных приборов, имеющих магнитные системы, в обязательном порядке осуществляется контроль параметров магнитного поля в рабочем воздушном зазоре, а в прецизионных приборах контролируется характер изменения магнитной индукции в рабочем зазоре.
При расчете прямых разомкнутых магнитов в качестве базовой геометрической формы магнита выбирается цилиндрическая. Приближенный расчет цилиндрического разомкнутого магнита осуществляется по следующей методике.
1. Выбирают материал постоянного магнита, для материала в соответствии с его кривой размагничивания находят рабочую точку А, соответствующую максимальной энергии.
2. По формуле
(3.44.)
находят величину коэффициента размагничивания Nм.
3. По найденному коэффициенту размагничивания Nм определяют соотношение lм /dм, где lм – длина магнита, а dм – его диаметр. Для этого можно воспользоваться данными, приведенными в таблице 3.6.
Таблица 3.6. Зависимость коэффициента размагничивания от геометрических размеров магнита.
lм/dм
1,35
1,4
1,5
1,6
1,85
2,0
2,4
3,0
5,0
6,0
7,5
Nм
1,9
1,8
1,7
1,5
1,4
1,1
0,9
0,5
0,4
0,3
0,2
0,1
4. Задавшись из конструктивных соображений величиной dм, находят lм или наоборот; при расчете магнита прямоугольного сечения, определяют диаметр цилиндрического магнита, площадь сечения которого эквивалента площади прямоугольного магнита.
5. По найденным размерам dм, Sм и lм магнита определяют его магнитный момент Mм или магнитный поток Фм по формулам:
Если исходными данными для расчета магнитной системы являются значения Mм или Фм, определение конструктивных размеров магнита проводят в обратном порядке.
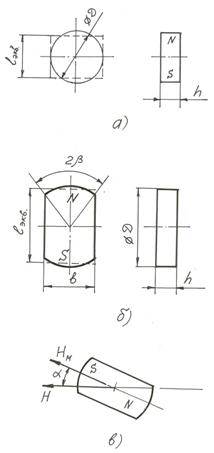
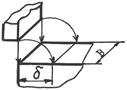
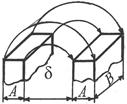
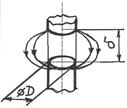
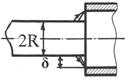
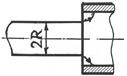
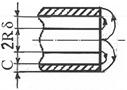
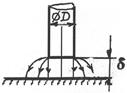
При расчете цилиндрических магнитов, намагниченных по диаметру, их приближенный расчет выполняют по приведенной выше методике расчета прямых разомкнутых магнитов, применяя эквивалентные геометрические размеры, которые приведены на рис. 3.31.
Рис. 3.31. Схемы к расчету прямых разомкнутых магнитов.
Для магнита, представленного на (рис. 3.31,а) Sм=D·h; lэкв=2D/π; для магнита, схема которого представлена на (рис. 3.31,б), Sм=b·h; lэкв=D·sinβ/β.
Если магнит, магнитный момент которого равен Mм, поместить в равномерное внешнее магнитное поле напряженностью H, то при несовпадении оси магнита с направлением вектора напряженности внешнего магнитного поля на магнит будет действовать устанавливающий момент, равный (рис 3.31,в)
(3.45)
Расчет замкнутых магнитных систем
При расчете замкнутых магнитных систем необходимо решить две основные задачи:
– в магнитной системе с известными геометрическими размерами определить величину магнитной индукции в рабочем зазоре Bвили магнитного потока Фв в рабочем зазоре;
– найти размеры и материал магнита, необходимого для создания в рабочем зазоре требуемого магнитного потока Фв или требуемой величины магнитной индукции Bв.
При известных материале магнита, его размерах и параметрах воздушного зазора определяют угловой коэффициент прямой проводимости по формуле (3.40.).
(3.46.)
где Gв.экв – эквивалентная проводимость воздушного зазора.
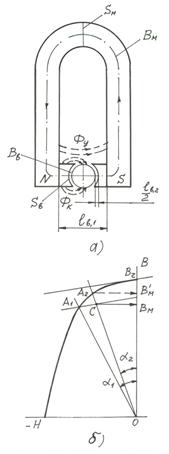
При расчете с учетом потоков рассеяния в магнитной системе находят коэффициент рассеяния σ, равный отношению магнитного потока Фв в рабочем воздушном зазоре к общему магнитному потоку магнита Фм. Общий поток складывается из потока в рабочем зазоре Фв, потока утечки Фу и краевого потока Фк (рис. 3.32.).
(3.47.)
Величину коэффициента σ можно определить также из соотношения следующих проводимостей Gв, Gу и Gк
(3.48.)
Для ориентировочных расчетов можно принимать, что потоки рассеяния не превышают в рационально сконструированных магнитных системах 30% от Фм.
Рис. 3.32. Схемы, иллюстрирующие методику расчета замкнутой магнитной системы.
а – схема магнитной системы; б – схема определения рабочей точки.
Расчет замкнутой магнитной системы, схема которой приведена на (рис.3.32,а), проводится по следующей методике:
1. Для выбранного из конструктивных соображений материала постоянного магнита определяется положение рабочей точки на кривой размагничивания.
2. Предполагая, что магнит будет намагничен до сборки магнитной системы, а затем будет установлена арматура, определяется рабочая точка А1 по углу проводимости γ1 или углу размагничивания α1 (рис.3.32,б).
(3.49.)
где – величина магнитного сопротивления воздушного зазора (обратная величина магнитной проводимости зазора Gв,1).
Проводя на графике кривой размагничивания прямую под углом α1, получим точку А1.
Угол размагничивания после установки в магнитную систему арматуры можно определить по формуле
(3.50.)
где
Проводя прямую под углом α2, находим точку А2.
3. Определяется положение рабочей точки, соответствующей рабочему состоянию магнитной системы. Для этого в точке Br проводится касательная к кривой размагничивания, в точке А1 проводится прямая, параллельная этой касательной. Рабочая точка определяется как точка пересечения прямой возврата, проведенной из точки А1 с прямой размагничивания, проведенной под углом α2 (точка C). Этой рабочей точке C соответствует индукция Bм, которую будет иметь магнит в нейтрали.
Магнитный поток магнита в нейтрали Фм равен сумме
(3.51.)
где Фв – магнитный поток в рабочем зазоре;
Фрас – магнитный поток рассеяния.
(3.52.)
где σ – коэффициент рассеяния, определяемый по формулам (3.47) и (3.48).
4. Определение величины индукции в рабочем зазоре, которая находится по формуле
(3.53.)
Следует отметить, что если бы магнит был намагничен после сборки с арматурой, величина индукции в рабочем зазоре была бы равна Bм', т.е. была бы существенно выше, чем в случае намагничивания магнита до сборки с арматурой.
Для осуществления уточненных расчетов магнитных систем необходимо определять эквивалентные проводимости воздушных зазоров на основе моделирования магнитных систем путем электрических схем замещения.
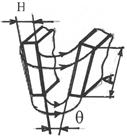
Рассмотрим простейшую магнитную систему (рис.3.33,а). Данная магнитная система может быть промоделирована следующей электрической схемой замещения (рис.3.33,б). Здесь θ – величина магнитодвижущей силы в нейтрали магнита, а Gв.экв – эквивалентная проводимость воздушного зазора.
Рис.3.33. Схема элементарной магнитной системы а) и ее схема замещения б).
При сложной конфигурации воздушных участков магнитной цепи и необходимости определения проводимости воздушного зазора с достаточно высокой точностью можно использовать метод разбивки магнитного поля в рабочем воздушном зазоре магнитной системы на элементарные трубки проводимости [3].
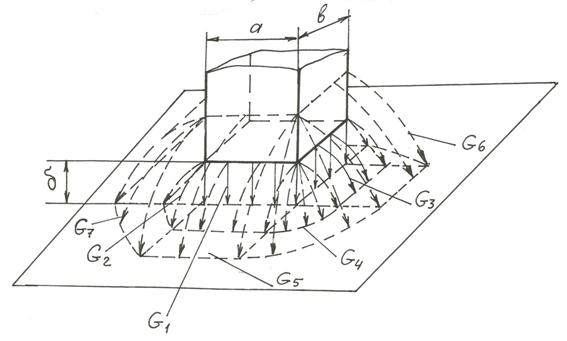
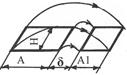
Суть данного метода состоит в том, что магнитное поле в рабочем зазоре магнитной системы между полюсами разбивают с помощью трубок индукции на ряд потоков, причем разбивку осуществляют таким образом, чтобы эти трубки индукции имели форму простых геометрических фигур. Проводимость каждой трубки определяют при этом как отношение среднего ее сечения к средней длине. Полная (эквивалентная) проводимость равна сумме проводимостей отдельных трубок, если приложенная к концам трубок разность магнитных потенциалов является для всех трубок одинаковой. Пример разбивки зазора магнитной системы на такие элементарные трубки проводимости приведен на рис.3.34.
Рис.3.34. Пример разбивки зазора магнитной системы на элементарные трубки проводимости.
На данной схеме показаны следующие трубки проводимости: G1 – трубка в виде прямоугольника a×b; G2 – четверть кругового цилиндра с радиусом, равным d и высотой a; G3 – четверть кругового цилиндра с радиусом, равным d и высотой b; G4 – половина шарового квадранта радиусом d; G5 – четверть полого кругового цилиндра с внутренним радиусом, равным d, и наружным, равным d+m, где m – величина, принимаемая обычно в пределах (1÷2) d и высотой, равной a; G6 – то же, что G5, но высота равна b; G7 – половина квадранта шаровой оболочки.
В таблице 3.7 приведены формулы для расчета проводимостей трубок в зависимости от их геометрических параметров [22].
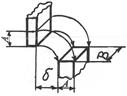
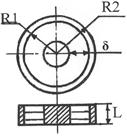
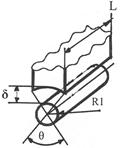
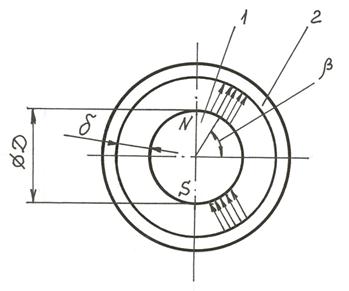
В различных индикаторах приборов летательных аппаратов нашли применение внутрирамочные магниты в виде цилиндра, намагниченного по диаметру. Схема магнитной системы с таким магнитом приведена на рис.3.35. Кольцо 2 из магнитомягкого материала является магнитопроводом и одновременно экранирует систему от воздействия внешних магнитных полей и от влияния магнитного поля цилиндрического магнита на другие объекты. В воздушном зазоре между магнитом 1 и магнитопроводом 2 размещают подвижную рамку с токонесущими витками.
Угловой коэффициент γ линии проводимости такого магнита определяют по формуле
(3.54.)
где D – диаметр магнита;
δ – величина воздушного зазора магнитной системы.
Таблица 3.7. Проводимость элементарных трубок
Код тру-бок
Виды трубок
Магнитные проводимости Gi
Площади сечения трубок Si
Параметры для расчета [мм],[град]
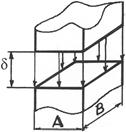
Прямоугольный параллелепипед
А
В
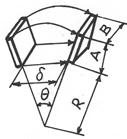
Проводимость между прямоугольными поверхностями, расположенными под углом q
Для q<20°
q [рад]
А
В
R
q
Для q>20°
А
В
R
q
Полуцилиндр
В
Цилиндрический квадрант (четверть целинра)
В
Половина цилиндрической трубы
Для >3А
при
А
В
Квадрат (четверть) цилиндрической трубы
Для >3А
при
А
В
Сферический квадрат
Квадрант сферической оболочки
А
Сферический октант
Полый сферический октант
А
Цилиндр
D
Часть тороида
D
Ребро трубы - боковая поверхность цилиндра
R
Ребро цилиндра – внутренняя поверхность трубы
R
Торец цилиндра – тарец трубы
при
при
C
R
Ребро цилиндра – перпендикулярная плоскость.
D
Цилиндрическая оболочка
R
L
Часть цилиндрической оболочки
R
L
q
Проводимость между прямоугольными поверхностями, лежащими в одной плоскости
А
А1
Н
Половина усеченного конуса
q
А
Половина полой конической оболочки
q
Н
Распределение магнитной индукции Bв в зазоре такой магнитной системы осуществляется по синусоидальному закону
(3.55.)
Материалы для изготовления постоянных магнитов
Для изготовления постоянных магнитов применяют материалы, называемые магнитотвердыми. Магнитотвердые материалы принято разделять на три группы: для постоянных магнитов, для гистерезисных двигателей и для магнитной записи [20].
Рис.3.35. Схема магнитной системы с цилиндрическим внутрирамочным магнитом:
1 – магнит; 2 – магнитопровод.
Материалы для изготовления постоянных магнитов разделяют на следующие основные группы:
– литые сплавы;
– ковкие сплавы;
– металлокерамические материалы;
– сплавы на основе драгоценных металлов;
– сплавы на основе редкоземельных элементов;
– магнитотвердые ферриты.
Литые магнитотвердые сплавы нашли наиболее широкое применение для изготовления постоянных магнитов массой от нескольких граммов до десятков килограммов. Основой данных сплавов является система Fe+Al+Ni с добавлением в качестве легирующих элементов Si, Cu, Ti, Co. Эти материалы являются твердыми и хрупкими, из методов механической обработки подвергаются шлифованию. Данные сплавы применяют для изготовления постоянных магнитов, от которых требуются высокие магнитные свойства при сравнительно невысокой стоимости. Кривые размагничивания для материалов этой группы приведены в справочнике [20].
Ковкие магнитные сплавы строятся на основе систем Fe+Ni+Cu и Cu+Ni+Co. Данные материалы имеют более низкие магнитные характеристики по сравнению со сплавами первой группы и применяются, когда постоянные магниты должны иметь форму и размеры, получаемые механической обработкой.
Металлокерамические материалы для постоянных магнитов используют при получении небольших деталей (до 100 г) без последующей механической обработки. Основой для получения таких материалов являются мелкодисперсные порошки Ni, Co, Ti, Cu, Fe.
Технология изготовления магнитов из металлокерамических материалов включает следующие операции: тщательное многочасовое перемешивание порошков, взятых в пропорциях, соответствующих маркам сплавов; прессование полученных смесей в прессформах при давлении порядка 1,0 ГПа; спекание вытянутой из прессформ заготовки в атмосфере водорода или вакууме при температурах 1200°С – 1300°С.
Сплавы на основе драгметаллов при сравнительно небольших величинах остаточной магнитной индукции имеют чрезвычайно высокие значения коэрцитивной силы, что обеспечивает высокую стабильность магнитных характеристик во времени и при изменении условий окружающей среды.
Сплав на основе системы Ag+Mn+Al (сильманаль) обладает малой остаточной индукцией при наличии очень большой коэрцитивной силы, составляющей до Hс=480 кА/м. Магниты из данного сплава могут применяться в качестве «магнитной пружины», имеющей высокую стабильность. Следует отметить, что данный сплав имеет сравнительно невысокую температуру Кюри, поэтому характеристики магнитов из сильманаля существенно зависят от температуры окружающей среды.
Более высокими значениями остаточной индукции обладают магнитные сплавы на основе систем Fe-Pt и Co-Pt. Так, сплав ПлЖ-78 имеет Br=0,4÷0,64 Тл, Hс≈520 кА/м; сплав ПлК-78 имеет Br=0,7÷0,8 Тл, Hс≈400 кА/м.
Сплавы, содержащие редкоземельные элементы строятся чаще всего на основе соединений самария и кобальта. Спеченные магниты из (SmPr)Co5 имеют параметры Br=1 Тл, Hс=1320 кА/м; (Tb0,8Y0,2)Co при 8°К имеет параметры Br=2 Тл, Hс≈900 кА/м.
Материалы для изготовления магнитопроводов и магнитных экранов
Для изготовления магнитопроводов магнитных систем применяют магнитомягкие материалы. Магнитомягкими называют ферромагнитные материалы, обладающие узкой петлей гистерезиса и имеющие величину коэрцитивной силы сотые и тысячные доли кА/м. Магнитомягкие материалы, предназначенные для работы в переменных магнитных полях, должны иметь малые потери на гистерезис и вихревые токи. В приборостроении в качестве магнитомягких нашли применение следующие материалы:
– стали электротехнические;
– сплавы с высокой магнитной проницаемостью (пермаллои);
– магнитомягкие ферриты.
Тонколистовая электротехническая легированная сталь, содержащая от 0,8 до 5% Si и изготовляемая в виде листов и лент толщиной менее 1 мм, применяется для изготовления «шихтованных» магнитопроводов, состоящих из отдельных изолированных пластин, работающих в постоянных и переменных магнитных полях в области низких и высоких частот. Легирование кремнием значительно повышает удельное электрическое сопротивление, снижает потери на вихревые токи и гистерезис, увеличивает магнитную проницаемость. В обозначении марок электротехнической легированной стали цифры обозначают: первая – класс по структурному состоянию и виду проката: 1 – горячекатаная изотропная; 2 – холоднокатаная изотропная; 3 – холоднокатаная анизотропная. Втораяцифра обозначает процентное содержание кремния; третья – группу по величине магнитных потерь; четвертая и пятая – количественные показатели магнитных характеристик.
Для работы в постоянных и переменных полях частотой до 50 Гц применяют нелегированные электротехнические стали марок 10880, 20880 (старое обозначение Э10), 10895, 20895 (Э12). Максимальная величина коэрцитивной силы для сталей этой группы не превышает 95 А/м (для стали марок 10895 и 20895).
Легированные электротехнические стали применяют для магнитопроводов, работающих в переменных магнитных полях, имеющих частоты до 500 Гц. Наиболее часто для этих целей применяют стали марок 1511 (Э41), 1512 (Э42), 1513 (Э43); стали 1521 (Э44), 1561 (Э45) и 1562 (Э46) используют для работы в переменных магнитных полях частотой до 1000 Гц. Величина коэрцитивной силы для стали 1512 не превышает 15 А/м.
Для работы в слабых магнитных полях применяют специальные сплавы с высокой магнитной проницаемостью – пермаллои. По составу пермаллои разделяют на низконикелевые, содержащие (40÷50)% Ni, и высоконикелевые, в состав которых входит (72÷80)% Ni.
Для улучшения электромагнитных и технологических свойств пермаллои часто легируют молибденом, хромом, кремнием, кобальтом, медью и другими элементами.
Низконикелевые пермаллои применяют для изготовления магнитопроводов датчиков перемещения, трансформаторов, реле, коррекционных электродвигателей, деталей магнитной арматуры, сердечников, магнитных экранов, работающих в слабых постоянных магнитных полях. Легированные низконикелевые пермаллои используют для изготовления магнитопроводов, работающих при повышенных и высоких частотах.
Высоконикелевые пермаллои обладают низким значением удельного сопротивления и поэтому используются для магнитных экранов и магнитопроводов, работающих в слабых постоянных магнитных полях.
Пермаллои очень чувствительны к механическим напряжениям, возникающим в процессе сборки и эксплуатации изделий. При сборке магнитопроводов из пермаллоев недопустимы удары и деформация деталей. Затяжка винтов при сборке должна быть слабой и тарированной.
К числу наиболее применяемых относят следующие пермаллои: 45Н, 50Н, 50НХС, 34НКМП, 35НКХСП (буква «П» в конце обозначения указывает на прямоугольный вид петли гистерезиса материала), 79НМ, 80НХС, 81НМА, 83НФ.
Величина коэрцитивной силы у пермаллоев зависит от технологии изготовления полуфабрикатов и для холоднокатаных лент составляет у материалов 79НМ и 80НХС до 1 А/м, для материала 50НХС до 10 А/м.
Магнитомягкие ферриты представляют собой смесь окислов металлов. Наибольшее применение находят марганец-цинковые и никель-цинковые ферриты. В области высоких частот применяют литий-цинковые и свинцово-никелевые ферриты.
По электрическим свойствам ферриты относят к полупроводникам. Их применяют в радиотехнических изделиях для магнитопроводов, работающих с слабых и сильных полях высоких частот (до 100 МГц). Их применяют в магнитных усилителях, для изготовления сердечников трансформаторов, катушек индуктивности, статоров и роторов высокочастотных микроэлектродвигателей.
Магнитные экраны
Магнитные экраны используют для защиты магнитных и электромагнитных устройств приборов от воздействия внешних постоянных и переменных магнитных полей.
При проектировании магнитных экранов следует учитывать следующие свойства:
– суммарный магнитный поток, проходящий по экрану, не должен доводить материал магнитного экрана до насыщения;
– наиболее совершенной формой экрана является многослойная сфера, состоящая из концентрических слоев магнитомягкого и немагнитного материалов, толщина которых должна по мере удаления от центра возрастать в геометрической прогрессии;
– при изменении всех размеров экрана в одинаковое число раз степень экранирования остается неизменной;
– уменьшение размеров магнитного экрана при сохранении его толщины увеличивает степень экранирования магнитного поля защищаемого устройства;
– наличие в экране небольших отверстий мало отражается на степени экранирования, но стыки между частями экрана следует располагать параллельно направлению помехонесущего магнитного поля;
– форма магнитного экрана мало влияет на степень экранирования.
Эффективность действия магнитного экрана оценивается величиной коэффициента экранирования, которая определяется из выражения
(3.56.)
где Нн – напряженность наружного магнитного поля;
Нвн – напряженность магнитного поля внутри магнитного экрана.
При эксплуатации измерительных приборов и элементов систем автоматического управления напряженность наружного постоянного или переменного магнитного поля в соответствии с нормативными документами (ГОСТ 1845-89) не должна превышать величины Нн=400 А/м.
Магнитные экраны в большинстве случаев располагают снаружи корпуса прибора; при этом сам корпус прибора часто является магнитным экраном. При высоких требованиях к степени экранирования применяют двух- и трехслойные магнитные экраны, однако их изготовление значительно сложнее однослойных.
При расчете магнитных экранов наружное магнитное поле Нн считают равномерным, что допустимо при условии, что между экранированным измерительным прибором и источником внешнего магнитного поля расстояния составляет более 1м, что в большинстве летательных аппаратов выполняется.
Так как форма магнитного экрана незначительно влияет на степень экранирования, то экран произвольной формы обычно рассчитывают по формулам сферического экрана, принимая за диаметр сферы среднее арифметическое значение размеров, , и по трем его главным осям системы координат.
(3.57.)
Так, цилиндрический экран с размерами rн, l, и d может быть рассчитан по формуле сферического экрана с наружным радиусом, равным
(3.58.)
где rн – наружный радиус цилиндрического экрана;
l – длина цилиндрического экрана;
d – толщина цилиндрического экрана.
Более подробно вопросы расчета магнитных экранов изложены в работе [23].
В магнитоэлектрических измерительных устройствах обмотки чаще всего используют в виде плоских конструкций, называемых рамками. Рамки в магнитоэлектрических измерительных устройствах бывают подвижные и неподвижные.
Подвижные рамки служат для создания движущего момента, действующего на подвижную систему прибора, неподвижные – используются для создания магнитного поля с величиной напряженности, пропорциональной току, протекаемому по рамке.
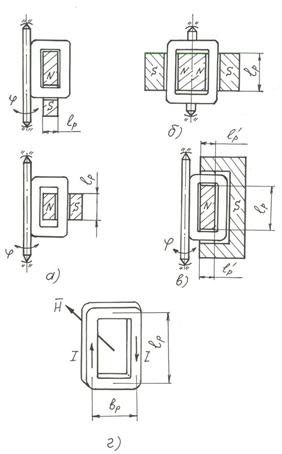
Подвижные рамки разделяют на каркасные и бескаркасные. По созданию движущего момента с помощью одной, двух или трех сторон рамки их разделяют на односторонние, двухсторонние и трехсторонние (рис.3.36.).
Каркасы рамок изготовляют из отожженных алюминия типа АДМ, латуни ЛЦ-38 или меди М1, так как здесь необходимо сочетание пластичности материала с высокой электропроводностью и часто с невысокой плотностью. На каркас наматывается обмотка медным эмалированным проводом диаметром, равным 0,03÷0,15 мм.
Бескаркасные рамки имеют, как правило такую же конструкцию, только обмотка выполняется на разъемных каркасах, далее намотанная рамка пропитывается лаком или компаундом, вынимается из приспособления и после полимеризации компаунда рамка представляет собой достаточно жесткую конструкцию, которая с помощью клея соединяется с подвижной системой прибора.
В общем случае величина момента, развиваемого рамкой с протекающим по ней током в магнитном поле, определяется формулой
(3.59.)
где – ширина рамки;
F – сила, действующая на рамку с током в магнитном поле;
W – число витков рамки;
– активная длина рамки;
I – ток, протекающий по рамке.
При использовании неподвижных рамок величина напряженности магнитного поля, создаваемого током, протекающим по рамке, равна
(3.60.)
где – коэффициент формы рамки, равный
(3.61.)
где W – число витков рамки;
– ширина рамки;
– длина рамки.
Магнитоэлектрические силовые элементы
Магнитоэлектрические силовые элементы, служащие для создания противодействующих сил и моментов, часто называют соответственно датчиками силы и датчиками момента. В датчиках первичной информации находят применение многополюсные магнитоэлектрические датчики момента.
В общем случае датчики момента (ДМ) применяются в приборах для решения следующих задач:
– создание момента, уравновешивающего движущий;
– в качестве исполнительных устройств систем коррекции в гировертикалях;
– в качестве исполнительных элементов силовой разгрузки в гиростабилизаторах (в этом случае их часто называют разгрузочными устройствами или разгрузочными двигателями);
– для обеспечения программного разворота подвижной системы при испытаниях гироприбора.
Основной характеристикой ДМ является зависимость его момента от величины управляющего сигнала (чаще всего тока). Наибольшее применение нашли ДМ, у которых характеристика на рабочем участке имеет линейный вид. В этом случае ДМ характеризуются следующими параметрами:
– крутизной характеристики (чувствительностью) по току
– длиной линейного участка характеристики;
– величиной нелинейности характеристики;
– максимальной величиной развиваемого момента;
– величиной «нулевого момента» – момента ДМ, развиваемого им при отсутствии управляющего сигнала IДМ.
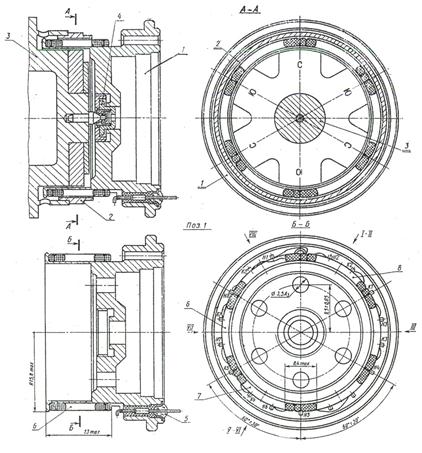
На рис.3.37. приведена типовая конструкция шестиполюсного магнитоэлектрического ДМ, применяемого в двухстепенных гироскопических приборах. ДМ представляет собой систему, состоящую из постоянного магнита с магнитопроводом и катушек, расположенных в воздушном зазоре магнитной системы. Принцип действия ДМ основан на взаимодействии тока, протекающего в катушке, расположенной в воздушном зазоре магнитной системы, с магнитным полем постоянного магнита.
Сила, действующая на проводник с током, помещенный в магнитное поле постоянного магнита, равна
(3.62.)
где Bв – индукция в зазоре магнитной системы;
lр – рабочая длина проводника;
I – ток, протекающий по проводнику.
Эта сила направлена перпендикулярно плоскости, образованной проводником, и направлением магнитного поля (вектором магнитной индукции) и ее направление определяется по правилу левой руки.
Рис. 3.37. Датчик момента постоянного тока с шестиполюсным магнитом.
При числе витков катушки ДМ, равном W, суммарная сила, действующая на все витки катушки, расположенные в воздушном зазоре под одним полюсом, равна
(3.63.)
На витки катушки, расположенные под другим полюсом, действует такая же сила, поэтому относительно подвижной системы парой сил создается момент, равный
(3.64.)
где rср – радиус от оси вращения подвижной системы до середины намотки катушки.
Датчик момента с шестиполюсным магнитом, приведенный на рис.3.37. будет развивать момент, определяемый по формуле
(3.65.)
где p – число пар полюсов магнита.
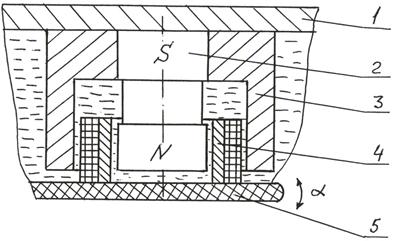
В прецизионных акселерометрах поплавкового типа нашли применение датчики силы плунжерного типа (рис.3.38.). Сила, развиваемая таким датчиком, может быть найдена по формуле
(3.66.)
где rср – средний радиус катушки.
Рис.3.38. Схема конструкции датчика силы акселерометра
Особенности конструирования узлов с магнитным взаимодействием
Магнитотвердые материалы, наиболее широко применяемые для изготовления магнитных систем приборов летательных аппаратов, являются твердыми и хрупкими и практически не обрабатываются на металлорежущих станках, за исключением шлифования. В связи с этим их рабочие поверхности должны быть либо цилиндрическими, либо плоскими для оптимизации процесса их обработки.
При соединении постоянных магнитов с сопрягаемыми деталями практически не применяются посадки с натягами, а широко используются их соединения с помощью развальцовки и завальцовки.
В малогабаритных прецизионных приборах используются клеевые соединения постоянных магнитов с сопрягаемыми элементами. В этом случае следует предусматривать либо их подбор с элементами магнитной системы с целью получения требуемых значений магнитной индукции в рабочем зазоре, либо наличие специальных регулировочных элементов.
Ферромагнитные материалы с повышением температуры окружающей среды снижают свои магнитные свойства и при достижении температуры, называемой точкой Кюри, их намагниченность становится равной нулю. Эти температуры составляют сотни градусов, наиболее низкая точка Кюри у никеля, она равна +350 оС.
Величина магнитного потока постоянного магнита изменяется в зависимости от температуры окружающей среды следующим образом
(3.67.)
где – величина магнитного потока при температуре окружающей среды, равной +20 оС;
Т – температура окружающей среды;
– температурный коэффициент магнитной проводимости материала магнита.
Для большинства ферромагнитных материалов величины составляет (0,17¸0,25)×10-3 1/оС, поэтому в элементах приборов с магнитным взаимодействием возникает значительная температурная погрешность. С целью ее снижения либо внутренняя полость приборов должна быть термостабилизирована, либо в конструкции необходимо использовать устройства, компенсирующие температурные изменения характеристик магнитных систем.
С этой целью в составе магнитных систем используют элементы, изготовленные из сплавов, существенно изменяющих магнитную проводимость с изменением температуры окружающей среды. Такие элементы называют термомагнитными шунтами. При обычной температуре часть магнитного потока замыкается через термомагнитный шунт, имеющий достаточно высокую магнитную проводимость. При повышении температуры магнитная проводимость материала шунта изменяется в большей степени, чем проводимость других элементов магнитопровода. Происходит перераспределение магнитных потоков, проходящих через рабочий зазор, и тем самым компенсируется снижение рабочего магнитного потока, вызванное изменением магнитной индукции постоянного магнита за счет изменения температуры окружающей среды.
В качестве термомагнитных материалов, применяемых для изготовления шунтов, применяют сплавы, имеющие низкие значения точки Кюри.
Для компенсации погрешностей в диапазоне положительных температур для изготовления шунтов используют сплав Н33Ю1, имеющий химический состав 33% Ni; 66% Fe и 1%Al и называемый термаллоем. Для работы в температурном интервале, равном (-60¸+60)оС применяют сплав Н32Х6Ю (32% Ni; 61% Fe; 6%Cr; 1%Al), обладающий высокими технологическими свойствами, допускающими холодную обработку резанием и штамповкой.
Наибольшее применение в авиаприборостроении находит сплав Н38Х14, называемый компенсатор и содержащий 38%Ni; 14%Cr, остальное – Fe. Этот сплав обладает высокой чувствительностью, работает при температурах окружающей среды до -80 оС, имеет высокие технологические свойства, используется для изготовления термомагнитных шунтов для приборов, к которым предъявляются повышенные точностные требования.
















 – величина магнитного сопротивления воздушного зазора (обратная величина магнитной проводимости зазора Gв,1).
– величина магнитного сопротивления воздушного зазора (обратная величина магнитной проводимости зазора Gв,1).





 q [рад]
q [рад]




 при
при 
 при
при 















 при
при 










 ,
,  и
и  по трем его главным осям системы координат.
по трем его главным осям системы координат.

 – ширина рамки;
– ширина рамки; – активная длина рамки;
– активная длина рамки;
 – коэффициент формы рамки, равный
– коэффициент формы рамки, равный






 – величина магнитного потока при температуре окружающей среды, равной +20 оС;
– величина магнитного потока при температуре окружающей среды, равной +20 оС; – температурный коэффициент магнитной проводимости материала магнита.
– температурный коэффициент магнитной проводимости материала магнита.