Правильность выбора и соответствие рабочей характеристики исполнительных устройств требованиям системы регулирования важно, так как исполнительное устройство - это конечным устройство воздействия САР на технологический процесс. На основе блочно-модульного принципа построения ГСП разработана унифицированная система исполнительных устройств (СИУ ГСП), объединяющая все виды общепромышленных исполнительных устройств больших, средних и малых расходов, состоящих из различных исполнительных механизмов и регулирующих элементов. Эта система предусматривает их работу с различными средами в диапазоне температуры от -180 до +600° С и давлении до 80 МПа.
Исполнительные устройства осуществляют воздействие на ток вещества или энергии, поступающий на объект управления согласно командной информации регулирующего устройства
ИУ состоят из регулирующего органа (РО), исполнительного механизма (ИМ) и вспомогательных элементов для управления, обратной связи, усиления и сигнализации положения РО.
Регулирующие органы непосредственно воздействуют на процесс изменения количества подаваемого вещества или энергии в ОУ.
По конструктивному исполнению для газообразных и жидких сред ИУ подразделяются на односедельные, двухседельные, шланговые, диафрагмовые и заслоночные.
Односедельные РО представляют собой клапан, в котором изменение пропускной способности определяется поступательным перемещением затвора относительно прохода седла. Они применяются при больших перепадах давления, расходах и диаметрах условного прохода РО (условный проход РО — это номинальный диаметр прохода присоединительных патрубков).
Шланговые и мембранные РО — это бессальниковые регулирующие органы, которые используются для изменения расхода агрессивных и загрязненных жидкостей.
Заслоночные РО применяются для управления потоками газовых сред. РО заслонка — это круглая, квадратная или прямоугольная пластина, закрепленная на оси и размещенная в корпусе.
В качестве РО используются поворотные двух-трехходовые краны.
По пропускной способности РО подразделяются на следующие группы: больших расходов от 40 до 25 000 М3/ч при условном проходе от 50 до1000 мм; средних расходов от 500 м3/ч при условном проходе от 10 до 300 мм; малых расходов от 0,1 до 4 м3/ч и соответственно условном проходе от 6 до 25 мм; и очень малых расходов —менее 0,1 м3/ч и соответственно условном проходе менее 10 мм.
Объемные РО.Представляют собой устройства с насосами объемного дозирования, а также объемные (камерные) питатели, отмеривающие или отсекающие при своем движении определенные объемы жидкости, газа или сыпучих продуктов.
Скоростные РО.Используются в основном для дозирования сыпучих материалов и продуктов, представляют собой тарельчатые или ленточные питатели, в которых регулирование расхода происходит путем изменения скорости движения ленты или вращающейся тарелки питателя или частоты вращения электропривода.
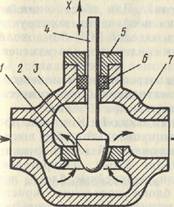
На рис. 3 приведена схема односедельного регулирующего клапана, состоящего из корпуса 7 с седлом /, штока 4 с затвором 3, имеющего запорную (профильную) поверхность 2, а также из сальника 6 с поджимным фланцем 5. Изменение пропускной способности клапана осуществляется путем перемещения затвора 3 вдоль оси прохода седла клапана.
Рис. 3. Односедельный регулирующий клапан.
Исполнительные механизмы (ИМ), являясь составной частью АСР, предназначены для перемещения регулирующего органа (РО) в соответствии с командой, получаемой от регулятора. При переходе на ручное (дистанционное) управление команда к ИМ подается человеком-оператором с помощью соответствующих органов ручного управления. В зависимости от вида энергии, используемой в ИМ, они подразделяются на электрические, пневматические и гидравлические.
Электрические ИМ.В автоматике в основном используются электромагнитные и электродвигательные электрические ИМ. Ос-новным узлом электромагнитных ИМ является электромагнит постоянного или переменного тока разных форм и конструкций, обеспечивающих его срабатывание при протекании тока по об-мотке управления.
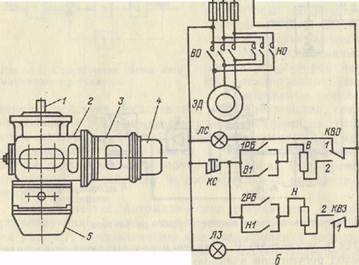
Электродвигательные ИМ являются наиболее распространенными. По характеру движения выходного рабочего звена они подразделяются на однооборотные, у которых выходной вал перемещается по дуге окружности (до 360°); многооборотные, у которых выходной вал вращается (более 360°), и прямоходные, выходное звено (шток) которых перемещается поступательно. Электродвигательный ИМ (рис. 4) состоит из электродвигателя 3с электромагнитным тормозом 4, блока 5 с конечными выключателями, червячного редуктора 2 и выходного вала редуктора /, предназначенного для сочленения с регулирующим органом. Пуск электродвигателя в ту или иную сторону вращения обеспечивается включением контактов 1РБ или 2РБ реле автоматического регулятора. При этом через обмотки В или Я реверсивного магнитного пускателя потечет ток и включатся его главные контакты ВО или ЯО, с помощью которых включается в сеть электродвигатель ЭД. Блок-контакты В1 и Н1 служат для шунтирования контактов регулятора. Для отключения электродвигателя при достижении выходным валом редуктора крайних положений предназначены конечные выключатели KBО и КВЗ, зажигая при этом одну из соответствующих сигнальных ламп ЛО или ЛЗ. Кнопка КС служит для аварийного останова электродвигателя.
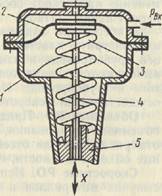
Пневматические ИМ.Предназначены для работы с пневматическими регуляторами и выпускаются в двух модификациях: мембранные и поршневые. Мембранный исполнительный механизм (рис. 5) состоит из следующих основных элементов: корпуса 1 (составлен из двух фланцев), мембраны 2, возвратной пружины 3 и штока 4. Втулка с натяжной гайкой 5 служит для регулирования усилия, развиваемого пружиной.
При подаче давления от пневматического регулятора в надмембранную плоскость мембрана 2 прогибается вниз, тем самым перемещая шток 4, сочлененный с регулирующим органом. Противодействующее усилие и возврат штока в исходное положение при отсутствии давления в надмембранной полости осуществляются с помощью пружины 3.
В поршневых ИМ перестановочное усилие создается давлением рабочей среды в поршневых полостях.
Гидравлические ИМ.В них используется энергия рабочей жидкости под давлением. Эти механизмы применяют в АСР, если необходимы значительные усилия для перемещения регулирующего органа.
При дистанционном или автоматическом управлении рабочими органами (РО) обходимо осуществлять своевременную остановку электропривода при достижении РО одного их крайних положений. Для этого многооборотные электрические механизмы (МЭМ) всех типов снабжены конечными выключателями, которые обеспечивают надежность и безаварийность работы арматуры. Широкое применение получили многооборотные механизмы типа МЭМ-40, 100, 250 Нм; прямоходные механизмы типа МЭП-2500, 25000, 63 000 Нм; взрывозащищенные механизмы МЭП-2500, 6300 Нм.
Одноборотные ИМ применяются для перемещения РО в системах дистанционного и автоматического управления. Находят применение однооборотные механизмы типа МЭО-90-16, 40 Нм, напряжением 220 В; МЭО-87-40, 100, 250 Нм, напряжением 220/380 В; МЭО-К-84-4000, 10000 Нм, напряжением 220/380 В; МЭО-92К-250, 320, 630, 800, 1000, 1600, 2500 Нм, напряжением 220/380 В; МЭО-93 —16, 40 Нм, напряжением 220 В: МЭО-94 — 6.3, 16, 40 Нм, напряжением 220 В; механизмы МЭО фланцевые 6.3, 16, 32, 40, 100, 250, 320, 630, 1000, 1600, 2500 Нм, напряжением 220 В и 220/380 В. В комплектации к ним поставляется механизм сигнализации положения МСП, МСП-А; дистанционный указатель положения ДУП-М и блок указателей В-12.
В исполнительных механизмах типа МЭО применяют бесконтактные системы управления и однофазные асинхронные конденсаторные двигатели типа ДАУ, отличающиеся малой инерционностью и высокой надежностью.
В исполнительных механизмах МЭОК и МЭОБ смонтированы трехфазные асинхронные электродвигатели типа АОП короткозамкнутым ротором. Исполнительный механизм МЭОК рассчитан на контактное управление от пускателя, а МЭОБ - на бесконтактное управление от тиристорного пускателя.
Пневматические исполнительные устройства (ПИМ) находят широкое применение в пожаро- и взрывоопасных производствах и характеризуются быстродействием и точностью позиционирования. Применяются мембранные и поршневые ПИМ.
Наибольшее распространение имеют мембранные ПИМ. В них мембрана воспринимает давление сжатого воздуха и преобразует егов перемещение выходного устройства. Они надежны, просты по конструктивному исполнению, ремонтопригодны, дешевы, развивают усилие до 40 кН и обеспечивают перемещение выходного устройства на расстояния от 4 до 100 мм.
В зависимости от усилия мембранно-пружинные механизмы подразделяются на механизмы, развивающие нормальные перестановочные усилия (МИМ), и механизмы, развивающие повышенные усилия (МИМП).
В зависимости от направления движения выходного органа (штока) МИМ и МИМП подразделяются на механизмы прямого и обратного действия. В механизме прямого действия при увеличении давления шток выталкивается из ПИМ, а в механизме обратного действия втягивается в ПИМ. Механизмы прямого действия применяют для РО нормально открытого типа, механизмы обратного действия — для управления РО нормально закрытого типа.
Поршневые ПИМ используют в тех случаях, когда на перемещение РО затрачиваются значительные перестановочные усилия.
ПИМ комплектуются ручными дублерами для возможности ручного управления затвором РО, и позиционерами (усилителями мощности) — для повышения быстродействия и точности установки выходного звена ИМ.
ИМ обозначаются в следующем виде: тип, вид действия, диаметр заделки мембраны, ход штока, наличие дополнительного устройства.
Пример обозначения: МИМ-ППХ-320-25-10, т. е. мембранный исполнительный механизм прямого действия, прямоходный, диаметр заделки мембраны 320 мм, ход штока 25 мм, дополнительное устройство отсутствует.