Пояснювальна записка до курсової роботи "Синтез цифрового автома-
та" має 21 с., 6 рис., 7 табл., 2 додатки, 5 літературних джерел.
Об'єкт проектування - цифровий автомат з двома режимами роботи,
керований вхідним сигналом М.
Мета роботи - засвоїти багатоваріантність реалізації автомата, яка
зв'язана з вибором типів тригерів і комбінаційної частини. Ознайомлення з
методами структурного синтезу автоматів Мура та Мілі.
Метод дослідження - структурний синтез автоматів Мура та Мілі. Мо-
жна відмітити, що тригер типу JK має більш розвинені логічні функції, тому
для нього функції збудження в середньому більш прості.
Комбінаційна частина автомата може бути побудована на логічних
елементах, мультиплексорах, інтегральних схемах програмовуваної пам'яті,
програмовуваних логічних матрицях і т. ін.
Результати курсової роботи рекомендується використовувати при ро-
боті над дипломним проектом та в СНТО на кафедрі.
ЦИФРОВІ АВТОМАТИ З ПАМЯТТЮ, КОМБІНАЦІЙНІ ПРИСТРОЇ,
ЛОГІЧНІ ЕЛЕМЕНТИ, КОДИ, ТРИГЕРИ.
ЗМІСТ
Завдання на виконання курсової роботи..................................................... 2
Реферат........................................................................................................... 3
Цифровий автомат............................................................................................. 5
Способи завдання цифрових автоматів........................................................ 8
Синтез автомата........................................................................................... 10
Висновок....................................................................................................... 17
Список використаної літератури................................................................. 18
Додатки........................................................................................................... 19
 1. ЦИФРОВІ АВТОМАТИ
1. ЦИФРОВІ АВТОМАТИ
Автоматами називаються цифрові схеми, стан виходів яких залежить не тільки від значень вхідних сигналів в даний момент часу, а й від внутрішнього стану схеми в даний та попередній моменти часу. З цього визначення випливає, що автомат має не один елемент пам'яті, інформація в яких залежить як від комбінації вхідних сигналів, так і від значення цієї інформації в попередні моменти часу. Аналогічний взаємозв'язок має місце і для вихідних сигналів. Таким чином, однією з особливостей цієї схеми є те, що вона має свій внутрішній стан, від якого залежить реакція на вхідні сигнали. Наявність елементів пам'яті, які можуть бути синхронним і працювати строго у відповідності з тактовими сигналами зовнішнього генератора, або синхронним, і працювати строго у відповідності з тактовими сигналами зовнішнього генератора, або асинхронним, і працювати у відповідності з зовнішніми сигналами. Він використовується для керування окремими механізмами та електронними пристроями.
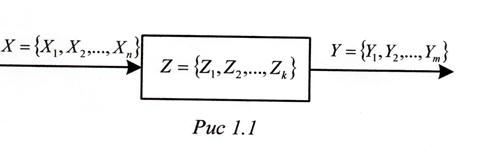
Математичною моделлю автомата є абстрактний автомат А. Автомат А задається множинами X, У, Z, а також двома функціями δ і λ.
A={X, Y, Z, δ, λ, z0 }
де X={x1, x2,.., xn} – множина вхідних сигналів; Y={y1, y2,.., ym}- множина вихідних сигналів; Z={z1, z2,…, zk}- множина станів; δ - функція переходів автомата; λ - функція виходів автомата; z0 Є Z - початковий стан автомата.
Абстрактний автомат має один вхідний і один вихідний канали.
 В кож ний момент t=0,1,2,... дискретного часу автомат знаходиться в певному станіZ(t) із множини Z станів автомата, в початковий момент t=0 він завжди знаходиться в початковому стані z(0)= Z0. В момент tперебуваючи в стані z(t),автомат здатний видати на вихідному каналі сигнал У(t) = λ(z(t), (t)), переходячи в стан z(t+1) = δ(z(t), х(t)), z(t) Є Z, у(t) Є Y.
В кож ний момент t=0,1,2,... дискретного часу автомат знаходиться в певному станіZ(t) із множини Z станів автомата, в початковий момент t=0 він завжди знаходиться в початковому стані z(0)= Z0. В момент tперебуваючи в стані z(t),автомат здатний видати на вихідному каналі сигнал У(t) = λ(z(t), (t)), переходячи в стан z(t+1) = δ(z(t), х(t)), z(t) Є Z, у(t) Є Y.
В залежності від способу визначення значень вихідних сигналів автомати поділяються на автомати Мілі та автомати Мура.
Закон функціонування автомата Мілі задається рівнянням:
Z(t+1) = δ (Z(t), Х(t));
Y(t) = λ(Z(t), Х(t))
де Z(0)=zо - початковий стан автомата; t=0,1,2,... - дискретний сигнал.
Функція δ (Z,Х) визначає наступні стани автоматів і називається функ-
цією переходів. Функція λ (Z,Х) визначає вихідні сигнали і називається функ цією виходів автомата. Структура автомата Мілі:
Рис 1.2
Закон функціонування автоматів Мура:
Z (t+1) = δ (Z(t), X(t));
Y(t)= λ(Z(t)).
Функція δ (Z,Х) називається функцією переходів, а функція λ(Z) - нази-
вається функцією виходів автомата. На відміну від автомата Мілі вихідні си-
гнали автомата Мура залежать тільки від станів автомата і не залежать вхідних. Структура автомата Мура:
Рис 1.3
 2. СПОСОБИ ЗАВДАННЯ ЦИФРОВИХ АВТОМАТІВ
2. СПОСОБИ ЗАВДАННЯ ЦИФРОВИХ АВТОМАТІВ
Для завдання кінцевого автомату А необхідно описати всі елементи
множини А={Х,У,Z, δ, λ, z0} - вхідний і вихідний алфавіти, множину станів,
а також функції переходів і виходів. Серед багатьох станів необхідно виділи-
ти стан z0 . в якому автомат знаходиться в момент часу t=0. Це потрібно для
фіксації початку роботи цифрового автомата.
Найчастіше використовуваними способами завдання автоматів є графі-
чний та табличний способи.
Графічний спосіб включає завдання автомата графом. Граф автомата -
це орієнтований граф, вершини якого належать станам, а дуги переходам між
ними. Кожна дуга відмічає вхідний сигнал, визивним в автоматі відповідний
даній дузі переходу і вихідним сигналом, який з'являється при цьому пере-
ході.
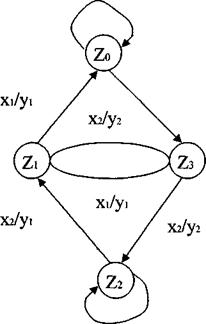
ХІ/У2
Рис. 2.1 Граф автомата Мілі
ХІ
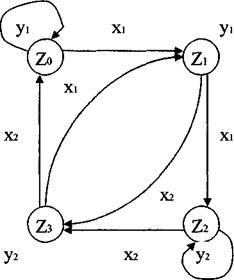
Рис.2.2 Граф автомата Мура
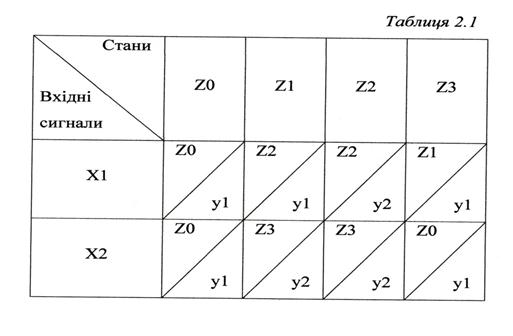
Робота автомата Мілі описується таблицями переходів та виходів, або совісною таблицею переходів і виходів. Рядки таблиць відповідають вхідним сигналам, а стовпці - стани і виходи. На перетині стовпця zi і рядка xi в таблиці ставиться стан zа = δ (zi, xi), в який автомат переходить із стану під дією сигналу xi і відповідно цьому переходу, позначається вихідний сигнал yk = λ (zi, xj).